trackRT软件及其数据解算精度分析
2017-07-07盛中杰汪伟张奇周大山
盛中杰,汪伟,张奇,周大山
(天津市测绘院,天津 300381)
trackRT软件及其数据解算精度分析
盛中杰*,汪伟,张奇,周大山
(天津市测绘院,天津 300381)
实时单历元高精度定位是GNSS工程应用的研究热点。本文以trackRT软件为研究对象,分析了该软件的架构,分实时数据通信解码及同步、GPS数据单历元解算和结果输出三个部分对该软件核心功能模块进行了深入分析;利用天津CORS距离约 5 km、30 km和 80 km站点超过 8 h的实时数据流对该软件单历元实时数据处理精度进行统计,结果表明,定位精度随距离增加而变化的现象不明显;在较好观测条件下,三种距离下的定位精度(RMS)结果近似,即在NE方向上约为 1 cm,在U方向上约为 3 cm。
实时单历元定位;精度分析;软件架构
1 引 言
实时单历元高精度定位广泛应用在地震预警和灾害监测等方面,是GNSS应用领域的研究热点。目前单历元高精度定位一般有两种方式[1]:一种是基于非差的单点定位方式,另一种是基于双差的相对定位方式。前者要达到厘米级定位精度需要较长的滤波收敛时间;后者一般采取成熟的RTK商用软件实现,用户不容易在此基础上进行代码级定制。基于开源软件实现实时单历元高精度定位对用户具有非常大的吸引力,TRACK是双差单历元高精度定位开源软件的典型代表。
GAMIT是世界上非常优秀的GPS数据后处理软件之一。在其早期版本(10.2以前)中自带的TRACK模块采用双差相对定位和向前/向后卡尔曼滤波模型[2],能分时段逐历元后处理GPS数据,因其单历元后处理结果的稳定性好,广泛用于地震、桥梁工程等领域研究[3,4]。在GAMIT 10.4及以后的版本中,TRACK模块有了大的调整,采用BNC(BKG Ntrip Client)软件模块接入并解码多路原始GPS实时数据流,在完成数据同步后,采取单历元M-W组合双差相对定位模型实时处理并求解整周模糊度,从而使得软件具备实时GPS高精度双差相对定位数据处理能力[5],10.4及以后版本TRACK软件模块完成了从单历元后处理到实时单历元数据处理的升级。更改版本后的TRACK模块更名为trackRT,目前广泛应用在地震监测领域。
2 trackRT软件架构及模型
在trackRT软件架构中,主要包括三个主要部分:实时数据通信解码及同步部分、GPS数据单历元解算(含整周模糊度解算)部分和结果输出部分。整个软件处理数据的主要流程如图1所示。
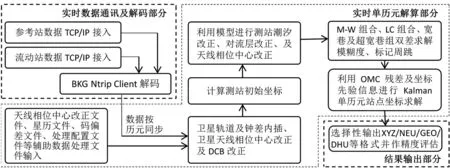
图1 trackRT软件数据处理流程
(1)实时数据通信及解码部分
trackRT使用的实时通信解码程序是从德国大地测量局开发的BNC(BKG Ntrip Client)软件模块移植过来的。其是在国际大地测量协会(IAG)欧洲分委员会(EUREF)和国际GNSS服务(IGS)的框架支持下开发的,主要是用于GNSS实时数据流同步检索、解码、转换和处理[6]。虽然其定位为实时工具,但其同时具备GNSS单点定位后处理功能。利用BNC程序,可以实现基于NTRIP协议、TCP/IP协议、UPD及串口数据流的数据传输,支持RTCM 3.0(向下兼容)数据流转发和分发,具备把卫星轨道和钟差数据通过多种协议进行网络广播的能力。
在trackRT软件中,主要使用BNC完成对IGS精密星历(一般使用超快速精密星历)的获取和对接收机RTCM实时数据流的接收及解码。这个过程一般通过NTRIP协议、TCP/IP协议或者直接通过串口读取数据流完成整个过程。国内有学者曾尝试对通信接口重新定制,取得初步实验结果[7]。
(2)实时单历元解算部分
trackRT软件进行单历元实时数据处理过程中,最核心的部分是单历元整周模糊度的确定;软件对周跳不进行修复,而是采取标注的方式把该卫星排除在解算外,直到该卫星信号再次稳定接收重新标注并解算模糊度。在模糊度解算上,主要采用M-W(Melbourne-Wubbena)宽巷组合(MW-WL)、超宽巷组合(EX-WL)和LC消电离层组合来解算模糊度,组合公式为:
(1)
(2)
(3)
其中, fi,φi,Ni,pi分别为i=1,2载波的频率、相位观测值、整周模糊度和P码伪距观测值,c为光速。通过确定的模糊度搜索空间,依据模糊度解算的最小方差与次小方差的Ratio比值,超过设定阈值(trackRT默认阈值为20.0)则模糊度固定成功。
trackRT使用IGS发布的ANTEX文件完成对卫星和接收机绝对天线相位中心的改正;对流层延迟改正依据配备的MTT、GMF等函数投影模型,采用Saastamoinen模型计算;流动站的固体潮改正采用IERS 2003模型改正;超快速轨道内插采用Newton插值法完成[8]。鉴于内容的基础性,不一一赘述。
(3)结果输出部分
在结果输出部分,trackRT有四种结果输出模式供选择。分别是WGS84地心坐标系XYZ格式,BLH大地坐标格式(GEO),相对参考站点的NEU坐标格式及DHU坐标格式。这里需要注意的是,DHU坐标格式是trackRT自定义的坐标输出格式,其输出的是当前站当前历元解算的坐标相对原始参考坐标在平面和高程方向上的差距,计算公式为:
DHU=Mxyz2neu×Deltaxyz
(4)
其中,Mxyz2neu为从地心坐标XYZ到NEU坐标的转换矩阵,其中NEU坐标系是Gamit/Globk软件在数据处理中广泛采取的一种自定义坐标系,不同传统意义上的站心地平坐标系[9,10],Deltaxyz为当前历元解算获得的WGS84地心坐标系结果与该点原参考结果矢量差值。
trackRT软件中输出的NEU坐标则直接采用下面公式进行计算:
N=-a×Bdelta
(5)
E=a×Ldelta×cos(B)
(6)
U=Hdelta
(7)
其中(N,E,U)为计算结果,(Bdelta,Ldelta,Hdelta)为流动站与参考站大地坐标差(弧度)向量,B为流动站点大地纬度(弧度),a为WGS84椭球长半轴。
3 trackRT软件解算实例
为测试trackRT软件单历元动态定位精度情况,选取天津市连续运行参考站网(TJCORS)中不同距离的站点进行实时单历元数据处理,并使用CORS站点坐标作为真值,分别统计不同基线长度下的单历元实时定位精度情况。实验中,参考点选择位于天津市测绘院内C座楼顶的CH01点,分别在距离约 5 km、30 km和 80 km左右选取三个CORS站点进行动态单历元相对定位处理,站点基本情况与处理策略如表1所示。

待测试站点基本情况 表1
依据处理策略,分别对三个站超过8 h的数据流进行单历元处理,得到XQYY站点、YC01站点和CH02站点相对CH01站点在NEU三个方向上(已经减去各自真值在NEU三个方向上相对CH01的分量)的坐标时间序列分别如图2(a)/(b)/(c),图3(a)/(b)/(c)和图4(a)/(b)/(c)所示。
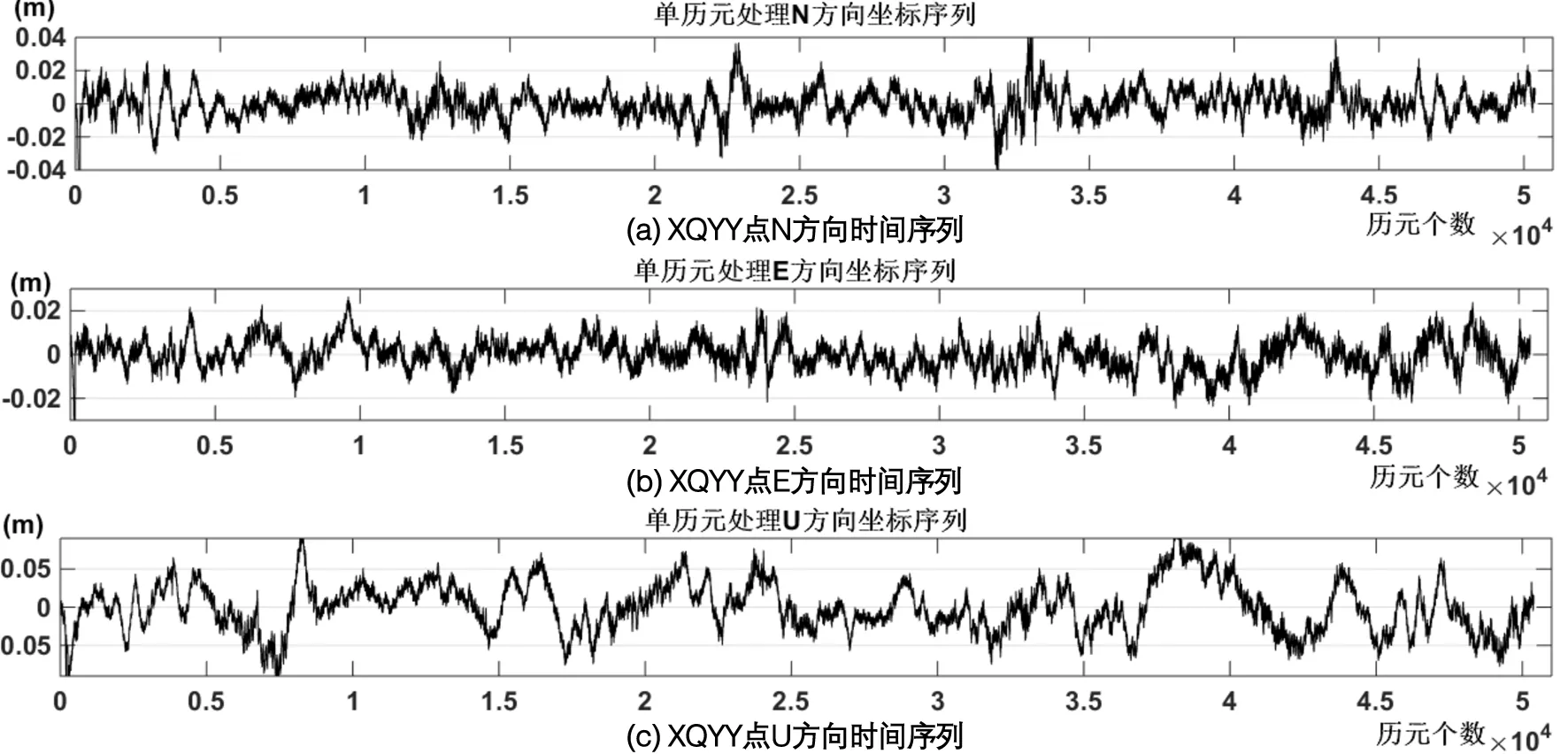
图2 XQYY站点坐标时间序列

图3 YC01站点时间序列

图4 CH02站点时间序列
分别统计三个站点相对CH01站点单历元解算获得的时间序列在NEU三个方向上的均方根误差,统计结果如表2所示。

各站点在NEU三个坐标分量上的精度统计情况 表2
结合前面坐标时间序列,从表2可见:在大约 5 km,30 km和 80 km三个区间,随着基线距离的增加,利用trackRT软件实时单历元解算定位结果的统计精度逐渐变差,但这种变化并不十分明显;尤其是当距离在 80 km左右,开始解算的前2个小时的定位结果波动很大(图3(a)/(b)/(c)),这可能与观测环境和卫星星座几何图形不好有关,如果在CH02站点统计精度过程中,不考虑开始解算的2个小时结果,则计算得知CH02站点在NEU三个方向上的均方根误差分别为:0.013 m、0.007 m和 0.033 m;如此看来,则在约 5 km、 30 km和 80 km距离长度利用trackRT进行实时单历元相对定位解算,则定位精度基本保持一致:即NE方向上约 1 cm、U方向上约 3 cm的定位精度。
4 结 论
文章对trackRT软件架构及其数据处理流程进行了梳理,并依据数据处理流程分实时数据通信解码及同步、GPS数据单历元解算和结果输出三个部分分别对软件主要模块进行论述;利用超过8小时的天津CORS站点数据流分约 5 km、 30 km和 80 km三个区间对trackRT软件实时单历元处理精度进行分析,实测结果表明,在这三个距离区间随着距离增加定位精度并没有明显变差;相反,在较为理想的观测条件下,在这三个区间内,trackRT的解算精度基本保持一致:即在NE方向上约 1 cm(E方向稍优)、U方向上约 3 cm的实时单历元定位精度。
[1] 黄声享,刘星,杨永波等. 利用GPS测定大型桥梁动态特性的试验及结果[J]. 武汉大学学报·信息科学版,2004(3):198~200.
[2] T.A.Herring,R.W.King,M.A.Floyd,S.C.McClusky,GAMIT Reference Manual[M]. 2015.
[3] 张小红,郭斐,郭博峰等. 利用高频GPS进行地表同震位移监测及震相识别[J]. 地球物理学报,2012,55(6):1912~1918.
[4] 彭方喜,吴云. 高频GPS动态监测地表形变的试验与研究[J]. 大地测量与地球动力学,2012(S1):109~112.
[5] 牛犇,黄勇,赵斌等. 利用trackRT进行GPS实时动态形变监测研究[J]. 武汉大学学报·信息科学版,2014,39(1):60~64.
[6] 黄立人,高砚龙,任立生. 关于NEU(ENU)坐标系统[J]. 大地测量与地球动力学,2006,26(1):97~99.
[7] Thomas H. Meyer. Grid,ground and globle Distances in the GPS era[J]. Surveying and Land Information Science,2002,62(2):1~39.
The Software Frame and Data Processing Precision Analysis of trackRT Software
Sheng Zhongjie,Wang Wei,Zhang Qi,Zhou Dashan
(Tianjin Institute of Surveying and Mapping,Tianjin 300381,China)
Real-time single epoch positioning is the researching hot point for GNSS engineering application currently. This paper took trackRT software as a case,deeply studied the software frame and its function by three perspectives: the communication synchronization and decoding,the GPS single epoch real time processing,and the results output. The statistic precession of trackRT software data processing ability was also tested by selecting Tianjin CORS stations,which were about 5Km,30Km and 80Km distances length,with those stations’ 8-hour long real-time data stream. The statistic results from the data processing show that the changes of RMS were not obvious with the distance increasing,on the contrary,the statistical RMS values were very close: it was about 1cm in NE direction,and about 3cm in U direction.
real-time single epoch positioning;precision analysis;software frame
1672-8262(2017)03-79-04
P228
A
2017—02—28
盛中杰(1973—),男,高级工程师,主要从事测绘管理工作。
地理空间信息工程国家测绘地理信息局重点实验室经费资助项目
