精确制导的激光枪射击装置设计
2017-07-05常亦迪李玉东李香来
常亦迪, 李玉东, 李香来, 常 虹
(1.长春理工大学 电子信息工程学院,长春 130022;2.内蒙古大学 物理科学与技术学院,呼和浩特 010021)
精确制导的激光枪射击装置设计
常亦迪1, 李玉东1, 李香来1, 常 虹2
(1.长春理工大学 电子信息工程学院,长春 130022;2.内蒙古大学 物理科学与技术学院,呼和浩特 010021)

模拟激光制导设计了具有快速响应、精确度高的激光枪射击装置。采用STM32为主控制器,由激光发射模块、电源模块、弹着点位移控制模块、图像采集与处理模块、语音播报环数模块等主要模块组成的电路系统。激光枪头方向通过2个舵机控制,即类似于云台的方法,实现激光枪弹着点在靶纸上的上下、左右移动,精确控制弹着点位置。通过摄像头采集激光点击中胸环靶的位置信息;通过单片机计算光点位置,在上位机上显示激光点环数、方位数据和胸环靶图形,并进行语音播报弹着点环数与方位信息。经测试,该装置可以用串口发送控制激光枪的弹着点,能自动瞄准并击中靶心,也可以根据设定的环数自动控制激光枪瞄准,实现击中胸环靶上相应环位置。
STM32; 摄像头; 舵机; 数据处理
0 引 言
激光制导技术在现代战争中受到了越来越多的关注。激光制导通过用激光目标指示器对准目标发射激光束,“寻的器”安装在攻击性弹头前端,捕获目标表面漫反射回来的激光,起到控制和导引弹头对目标进行奔袭,直至击中目标并将目标炸掉的目的。在大学生设计实验中,引入激光枪射击装置设计,模拟激光制导中的控制和牵引弹头对目标进行奔袭,直至击中目标并用摄像头采集信息进行实时反馈[1-5]。本文对精准定位目标靶位置进行了理论分析,提出总体设计及各个目标模块设计的可行性方案。综合考虑了软硬件的设计要求,确定选择激光控制电机[6]、摄像头模块选择和算法设计[7-8]和控制器,最终达到命中精度达到4 mm,可控性达到100%,实现自动寻找靶心并击中目标靶心的功能。因摄像头对光线的影响较大,所以需要自行运用VC++编写上位机代码,进而改善二值化的阀值,降低光线明暗的影响[9]。
1 方案比较选择
1.1 舵机选择
舵机的主要作用是调整激光笔的位置,指向点光源,可选取如下方案:①步进电机。在非超载的情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。每给一次脉冲信号,电机能够转过一个步距角。②直流减速电机[10]。此电机在正常通电状态下,转速平稳,角度的变化也近乎连续,控制简单方便。③舵机。此电机由PWM的占空比来控制转动角度。角度准确,控制简单。
根据设计的要求可知,步进电机存在的明显缺陷是角度变化为步进式,精确性比较差,控制也相对复杂。直流减速电机角度连续变化,转速平稳,容易控制是比较好的选择[11]。进一步地,舵机集各个优点于一体,精确性较高,容易控制,因而本文选用方案③。
1.2 摄像头模块选择
本系统中摄像头作为唯一的传感信息采集单元,经摄像头采集靶面的图像,通过单片机对靶面图像进行处理运算,自动识别目标位置,并进行相关的自动操作,从而实现题目中所要求的功能。本系统采用的数字处理系统,因此需要获得数字图像。方案①:模拟摄像头。输出为模拟视频信号,若需对所获得的图像信号进行数字信号处理,则需经过图像采集卡将模拟视频信号转换为数字视频信号,并加以压缩后才可以传输给计算机进行处理运用。若使用模拟摄像头,系统的结构则比较复杂,且模拟视频信号转换为数字信号,AD芯片需要非常高的转换速度,处理器也需要非常高的性能。方案②:数字摄像头。数字摄像头可以直接获得数字视频信号,然后通过串、并口,将数字图像的数据传输给计算机等处理器进行处理运用。使用数字摄像头,系统的硬件结构简单,且采集数字图像比较简捷。
综合考虑选择方案②,采用数字摄像头AV316S,高性能的单一小体积封装,且价格便宜,易于购买,能够满足一般图像采集系统的要求。
1.3 控制器选择
方案①:采用STC89C51单片机作为控制器[12]。STC89C51单片机为即插型可编程器件,编程方便。为了满足激光枪射击装置要求,需要按键模块,舵机模块,音频模块,电源供电模块,功放模块等需要很多端口,而STC89C51单片机引脚过少,处理速度也不够迅速,所以这款单片机不满足要求。
方案②:采用可编程器件CPLD作为控制器[13]。CPLD可以实现各种复杂的逻辑功能、规模大、密度小、体积小、稳定性高、IO资源丰富,易于进行功能拓展。采用并行的输入输出方式,提高了系统的处理速度,适合作为大规模控制系统的核心,但是功耗大价格也相当昂贵。
方案③:采用STM32单片机作为控制器,STM32为32位处理器数据处理能力比普通单片机更强,并且最高可达到12 MHz的主频,处理速度极快,端口资源十分丰富,价格便宜,适合作为一个自动控制系统的控制器[14-15]。
根据激光枪射击装置要求以及实际情况,选用方案③。
1.4 音频电路选择
选用ISD1720芯片,因为ISD1720芯片为常见音频芯片,价格便宜,易于购买,且自带存储与播放功能,能满足要求,所以采用ISD1720芯片[16]。
2 理论分析与计算
2.1 激光点运动轨迹分析
在胸环靶面上建立一个直角坐标系,根据匀速直线运动公式S=vt,激光点从任一点到达指定点,它的位移等于x、y方向的和位移,由此可知
通过运动路径分析(见图1),只要分别满足了x、y方向的位移,则它的运动轨迹即和位移也就确定了,就可达到任一点移动要求。
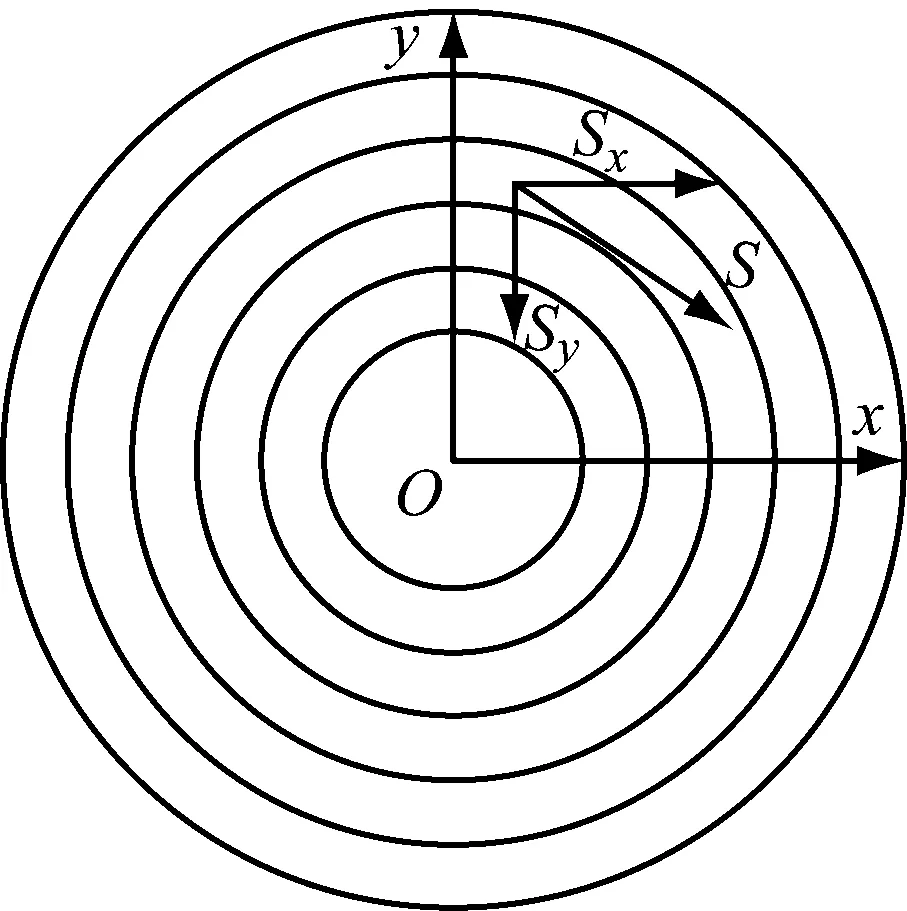
图1 运动路径分析
2.2 打靶精度分析
如图2所示,抽象出激光打靶的数学模型。对于同心圆,在水平方向和竖直方向所需要的位移量是相等的,即控制激光点水平和竖直移动所需要的位移量精度是相等的。
根据自主选择的胸环靶以及设计要求可知:L=309 cm,H=50 cm,L2≤5 cm,L3≤5 cm,

图2 激光打靶模式数学模型
L3=L·tan(β+arctan(H/L))-H
根据数学模型推导如下:
式中:L为激光点距胸环靶水平距离;H为胸环靶中心距地面垂直距离;α为激光点在胸环靶上最小水平移动距离对应移动角;β为激光点在胸环靶上最小竖直移动距离对应移动角。
3 系统设计
3.1 总体设计
整个设计如图3所示,以STM32为核心,产生PWM波控制舵机,通过矩阵键盘操作来实现舵机的上/下左右移动,通过VC++程序操作摄像头模块进行图像信息采集,经过分析处理后在电脑显示端播放,同时播放语音提示。

图3 整体系统框图
3.2 硬件电路的设计
3.2.1 单片机及外围接口电路设计
如图4所示,两个舵机接STM32的PTA8和PTC62个引脚,键盘PTC5,PTA15,PTB5,PTB6,PTB7,PTB8,5个引脚,语音模块接PTB0,PTB10,PTB11,PTB12,PTB13,PTB14,PTB15这6个引脚,激光笔接PD2引脚。

图4 单片机引脚图
3.2.2 激光驱动电路设计
如图5所示,利用三极管的开关特性,使用STM32引脚复用功能,复用LED端口,用软件编程高低电平的变化,对激光笔的开关进行控制。低电平时,激光笔通路,并用编程控制激光笔的开启时间。
3.2.3 语音模块设计
运用软件控制,使用VC++调用音频文件效果比硬件连接电路使用ISD1720效果好,所以采用软件控制来达到更好的音频播放功能。386D音频功率放大器主要应用于低电压消费类产品。为使外围元件最少,电压增益内置为20。当在1脚和8脚之间增加一只外接的电阻和电容,电压增益调为最高到200,并且电压增益可在此限度内任意可调。输入端以地为参考,并且输出端被自动偏置到电源电压的一半。在6 V电源电压下,其静态功耗仅为24 mW,这使得386D特别适合于电池供电。具体电路图如图6所示。
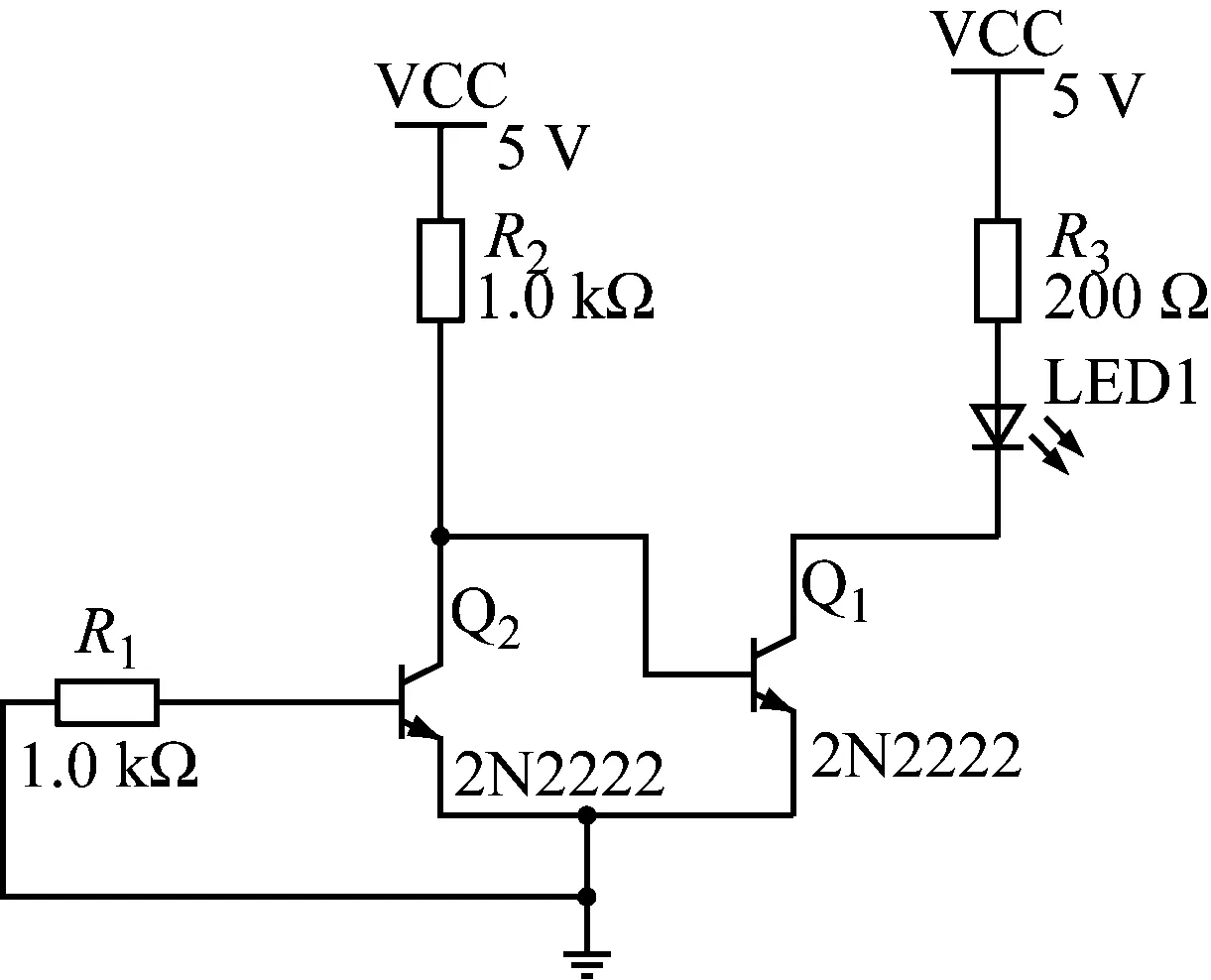
图5 激光笔电路

图6 音频功率放大器
3.2.4 电源模块设计
根据舵机参数,要求舵机在工作范围之内进行稳定工作。设计一个220 V转5 V电路来给舵机供电,单片机接3.3 V供电。语音播放电路接5 V供电。由于电源电路模块比较简单,这里就不加以叙述了。
3.3 软件程序设计
程序流程图如图7所示,通过STM32产生PWM波占空比的变化来精确驱动舵机,矩阵键盘调节舵机上下左右移动和激光束的开启,VC++程序自行编写一个上位机并对图像进行软件二值化处理,对提取到的数据进行处理从而控制语音播报环数信息,通过电脑端呈现图像。
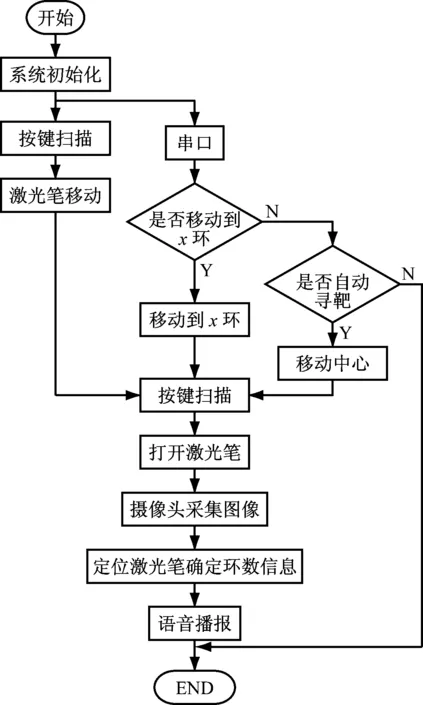
图7 主程序流程图(x是目标环数)
4 测试方案与测试结果
4.1 测试仪器及软件
测试仪器:示波器RIGOL DS5102M,数字万用表UT60G,卷尺5 m,直尺30 cm。采用数字万用表和示波器,对电路板连接情况和单片机PWM波形进行测试。
通过Multism和Proteus分别对模拟电路和单片机进行仿真,用KILL进行STM32的编程,用VC++开源摄像头上位机代码进行图像数据处理。
4.2 测试结果
(1) 键盘控制激光枪弹着点。测试方法:实际测试中,采用可调焦激光模组,胸环靶上光斑直径约为4 mm,用直尺测量胸环靶上光斑直径,完全可调节到<5 mm,满足射击的要求。按下键盘上S1、S2、S3、S4 4个按键,通过两个舵机可控制激光笔上、下、左、右转动一定角度,实现立体移动。按下S5键,控制激光枪发射激光束,然后分别按下S1、S2、S3、S4 4个按键,观察弹着点的移动方向,实现弹着点的移动,响应速度较快,精确度高。
(2) 摄像头识别射击环数及方位。测试方法:按下S1键完成测试(1)。同时,指定射击环数,控制激光笔移动到指定位置,实现射击。电脑采集图像,显示弹着点环数及方位,记录实际值和测量值,填入表1并进行误差对比。

表1 摄像头识别弹着点环数及方位
由表1可以看出,在实验允许误差范围内,系统能正确识别并显示弹着点环数及方位信息。
(3) 光斑从胸环靶指定位置迅速瞄准击中靶心。测试方法:按下S5键控制激光枪发射激光束,键盘控制激光束光斑于胸环靶上一定位置,然后电脑控制串口通信实现击中靶心精确定位,记录到表2。
由表2可以看出,完全符合理论分析。
(4) 根据激光枪根据设定环数瞄准相应位置。测试方法:利用串口向电脑发送环数命令,看激光枪是否能瞄准胸环靶上相应位置,记录设定环数和实际瞄准环数列于表3。

表2 光斑从胸环靶制定位置迅速瞄准击中靶心

表3 激光枪根据设定环数瞄准相应位置
由表3可以看出,在误差允许范围内,根据设定环数,激光枪能瞄准击中胸环靶上相应位置,及满足测试要求(3)。
5 结 语
系统完整实现了激光枪精确射击的要求,胸环靶上弹着点直径最小可达可4 mm。激光枪在键盘控制下,可上、下、左、右移动靶纸上弹着点位置,摄像头能准确识别弹着点方位,并通过液晶显示环数及方位。一方面,激光枪根据设定环数,实现瞄准射击相应位置。进一步实现自动瞄准功能,光斑能够从胸环靶指定位置,迅速瞄准击中靶心。通过以上测试,本次设计采用模块化的硬件和软件设计,选取合适的控制算法,成功地实现了激光弹着点环数和方位的查找,通过二维平移架控制靶面激光点的水平和竖直方向的平移,进而实现自动中心打靶和自动定位打靶的功能。
[1] 鱼小军,郑志强,刘海林,等. 激光半主动航空制导武器半实物仿真研究[J]. 航空精密制造技术,2016, 53(6):13-17.
[2] 宋延嵩,安 岩,李欣航,等. 激光准直系统中的杂散光分析与抑制[J]. 中国光学,2016, 9(6):663-670.
[3] 张 春,李 鹏,赵 斌,等.高炮抗击精确制导炸弹技术研究[J].火炮发射与控制学报,2016,37(4):87-91.
[4] 李龙静,林狮狮,黄辉泽,等.激光枪自动打靶控制装置的设计[J].数字技术与应用,2014(4):9-10.
[5] 谭 洪,邓彬伟,温沐阳,等.激光枪自动射击装置设计与实现[J].机械研究与应用,2013,26(1):76-79.
[6] 童诗白,华成英.模拟电子技术基础[M].4版.北京:高等教育出版社,2006(5):56-60.
[7] 求是科技.Visual C++典型算法及实现数字图像处理[M].北京:人民邮电出版社,2006.
[8] 谭浩强.C程序设计[M].3版.北京:清华大学出版社,2008.
[9] 朱海洋,徐根玖,李元晨,等.基于图像分块的局部区域动态阈值选取方法[J].计算机与现代化,2016,25(5):53-57.
[10] 王 伟. 基于DSPIC30F4011的直流减速电机控制研究[J].电子制作,2016,4(4):38.
[11] 张仁尊.线性CCD智能车的控制系统设计[J].山东农业大学学报(自然科学版),2016,47(5):731-735.
[12] 马昊伟,董继先.基于STC89C51单片机的步进电动机的控制系统设计[J].煤矿机械,2012,33(7):222-223.
[13] 王祝炯.基于CPLD芯片的数字控制器实现[J].仪器仪表用户,2007,14(5):65-67.
[14] 刘 军.例说STM32[M].北京:北京航空航天大学出版社.2011.
[15] 郑优讯,李宗伯.基于STM32微处理器的GPRS数据传输技术的研究[J].微型机与应用,2012,31(21):60-64.
[16] 王虎升,李金环,袁宪锋,等.基于STM32的嵌入式语音播报系统的设计[J].北京联合大学学报(自然科学版),2011,25(3):11-15.
Design of Laser Gun Shooting Device with Precise Guidance Technique
CHANGYidi1,LIYudong1,LIXianglai1,CHANGHong2
(1. College of Electronical and Information Engineering, Changchun University of Science and Technology, Changchun 130022, China; 2. School of Physics Science and Technology, Inner Mongolia University, Hohhot 010021, China)
We designed a laser shooting system with rapid response and high precision. The system is composed of laser shooting module, power module, impact displacement control module, image acquisition and processing module, voice broadcasting module, etc. Digital USB camera is used as the image acquisition and processing module is used to detect the target position on the chest round target. The control system is designed based on single chip Microcomputer STM32. It controls 2 steering gears as a cradle head, which move the laser gun up, down, left or right, such that the impact point of the laser gun can be further accurately controled. In this design, with the image obtained by image acquisition and processing module, the light spot is quickly focused on the target, and images of the impact are collected for the voice and video ring number and the azimuth. According to the set position, the system rapidly aims at the bull’s-eye at corresponding ring number, and the system also fulfills other requirements of the subject.
STM32; camera; steering gear; data processing
2016-08-29
常亦迪(1997-),男,吉林镇赉人,本科生,专业电子信息工程。Tel.: 18843629773;E-mail: 2419866146@qq.com
常 虹(1975-),女,内蒙古呼和浩特人,副教授,专业凝聚态物理方向。Tel.: 13654885045;E-mail: 1832350745@qq.com
TP 368.1
A
1006-7167(2017)06-0088-05
