平台式惯导系统伺服回路故障分析与改进措施
2017-07-05贡志波朱天辉张瑞敏
贡志波,朱天辉,彭 鹏,张瑞敏
(1.石家庄海山航空电子科技有限公司 维修中心,河北 石家庄 050208;2.石家庄海山实业发展总公司 科研部,河北 石家庄 050208)
平台式惯导系统伺服回路故障分析与改进措施
贡志波1,朱天辉1,彭 鹏1,张瑞敏2
(1.石家庄海山航空电子科技有限公司 维修中心,河北 石家庄 050208;2.石家庄海山实业发展总公司 科研部,河北 石家庄 050208)
从平台式惯导系统的伺服回路原理入手,对伺服回路故障产生的机理进行了分析研究,提出了有针对性的改进措施并在产品修理中落实,有效降低了伺服回路的故障率,提高了产品的可靠性。
平台式惯导系统;伺服回路;改进措施
0 引言
平台式惯性导航系统是我国早期及目前军用飞机型号的主力导航设备,也是我国军用飞机装备惯性导航设备的开启先河。目前,我国现役飞机绝大部分装备平台式惯导系统,因此,平台式惯导系统工作的可靠性及其故障研究成为我国军队及科研院所、企业共同面对的主要研究课题。在平台式惯导系统已发生的各种故障当中,以伺服回路故障最为复杂,对飞行的影响也最大,故障严重时惯导直接停止工作。因此,本文着重对平台式惯导系统伺服回路故障进行分析研究,并提出改进措施。
1 伺服回路原理
平台式惯导系统伺服回路的物理基础就是惯性平台和伺服放大器,伺服回路的受控变量是四个框架轴的绝对角运动,观测变量为陀螺仪输出信号及框架角传感器输出信号[1]。
当飞机飞行姿态改变时,由于平台安装架通过机箱与飞机固连,瞬间平台框架跟随飞机运动,安装在平台框架上的陀螺壳体随之偏离了陀螺挠性头,陀螺的信号器敏感到此角运动信号,信号经过陀螺前放、交流放大、解调滤波、一倍频陷波器、校正级、二倍频陷波器后传到功率放大器,功率放大器输出给平台框架上的力矩电机,力矩电机带动框架转动,最终使框架回到初始平衡位置,此时陀螺信号敏感器输出为零。简言之,平台各框架始终跟踪陀螺挠性头转动,即为伺服回路的工作原理,如图1所示。
2 伺服回路故障机理
2.1 伺服回路故障分析
伺服回路的检测是通过监控伺服放大器输出端是否有脉冲调制信号来实现的。当伺服回路工作正常时,其伺服放大器的输出端输出脉冲调制信号;当伺服回路故障时,其伺服放大器的输出端无脉冲调制信号或输出为直流信号,此时,故障检测电路给出故障信号,并经故障延时后报出故障。其故障检测方案如图2所示。

图2 伺服回路故障检测示意图
伺服回路由方位、内横滚、俯仰、外横滚四个主回路及一个多余轴锁定回路组成,而每个主回路又有姿态角传感器或方位角传感器、挠性陀螺仪、陀螺前置放大器、伺服放大器、直流力矩电机及相关的传感器激磁电源、放大器正常工作所需的直流电源组成[2]。其单一主回路(以内横滚回路为例)如图3所示。
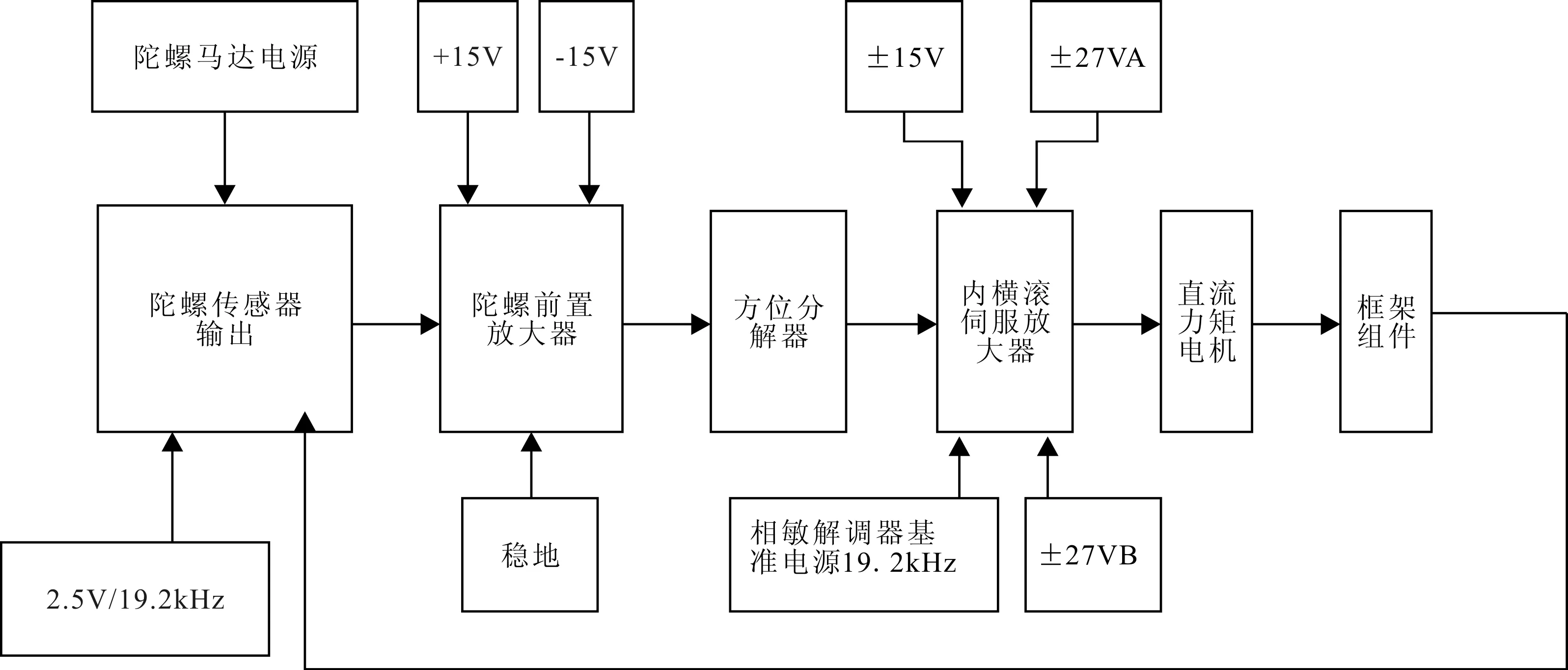
图3 内横滚回路工作原理框图
伺服回路中的任何一个部件和连接各部件的导线(包括导电环)出现问题,都可能会导致伺服回路故障。
2.2 伺服回路故障树
伺服回路故障树如图4所示。
2.2.1 电气连接通路分析
伺服放大器的输入信号连接不可靠会引起锁定放大器输出不正常,锁定放大器输出信号连接不可靠会导致锁定回路开路,引起惯导系统报伺服回路故障。
2.2.2 惯性平台的分析
(1)挠性陀螺仪分析。挠性陀螺仪是平台式惯导系统中最为重要的敏感元件之一,也是伺服回路中的重要环节。作为惯导系统的角度敏感元件,同时起到给定平台跟踪角度的作用。惯性导航系统所用惯性平台是由两个三自由度挠性陀螺仪构成的四环三轴惯性平台[3]。若挠性陀螺仪的传感器、陀螺前置放大器输出异常,则会导致伺服放大器输出异常,惯导系统报伺服回路故障。若陀螺仪力矩器线圈电阻减小或短路,回路施矩电流增大,陀螺信号器输出增大,伺服放大器输出饱和,惯导系统就会报伺服回路故障。
(2)环框机械故障分析。平台式惯导系统所用惯性平台的框架系统是保证惯性平台绕三个稳定轴能够自由转动,从而实现平台坐标系跟踪地理坐标系的功能。环框系统出现卡滞,则对应环框系统的摩擦力矩变大,直接影响了稳定平台绕相应稳定轴的稳定精度,进而影响到惯导系统的导航精度。严重的情况下,环框系统卡死,不能正常转动,则会导致相应的伺服回路(包括锁定放大器)输出饱和力矩,会导致惯导系统报伺服回路故障。
2.2.3 伺服放大器板分析
平台式惯导系统的伺服放大器板有方位、内滚、俯仰和外滚四路主通道伺服放大器以及一路多余轴锁定放大器。其中四路主通道放大器分别控制惯性平台的四个框架稳定工作,而多余轴锁定放大器则用来控制除了三个稳定轴之外的一个多余轴的稳定工作。伺服放大器若输出异常,则陀螺轴无法稳定工作,会导致惯导系统报伺服回路故障。
3 解决思路及改进措施
根据平台式惯导系统的修理经验及数据统计,惯导系统伺服回路故障发生在惯性平台内的占到超过九成,所以,伺服回路故障的解决思路应重点放在惯性平台上,尤其应重点关注惯性平台内部件的故障问题。整个惯性平台从结构组成上主要分为挠性陀螺、力矩电机、轴承、加速度计、导电环、框架,而由于平台部件问题引起惯导系统伺服回路故障的原因主要有三种:平台框架转动摩擦力矩变大、导电环信号传输异常、力矩电机输出力矩降低。所以,在产品修理中,我们应从这三个方面进行重点检查并采取改进措施。
3.1 “平台框架转动摩擦力矩变大”的改进措施
3.1.1 轴承支承结构的改进
惯性平台外滚环采用单臂支承方式,整个平台台体的重量全由外滚环承载,而早期外滚环轴承采用成对轴承,造成轴承受力点集中,外滚环转动摩擦力矩变大。为解决这一问题,将原来的成对轴承支承方式改为一大一小轴承并在外环轴的不同位置进行分离支承的方式[4],使受力点分布更合理,减小了转动摩擦力矩,支承也更稳定。在产品修理中,应重点检查平台外滚环的轴承支承方式,并按要求将成对轴承改为一大一小轴承。
3.1.2 轴承转动摩擦力矩温度敏感性的解决
通过试验发现,外环轴承在低温时启动摩擦力矩较常温及高温时大很多,转动不顺畅出现卡滞现象。为解决这一问题,在轴承内外侧的安装支座零件上粘贴加热片,在平台工作时同时给轴承加温,降低在低温环境下轴承启动的摩擦力矩,使环框转动更顺畅。在产品修理时,需在未贴加热片的外环支座上粘贴加热片。
3.1.3 平台装配修理过程中多余物的控制
(1)检查平台方位框的外形,将平台方位框更换为带防尘沿的方位框,增加防尘沿,避免装配过程中多余物进入裸露的轴承内部,造成轴承卡滞。
(2)平台装调和修理中,从操作人员及使用工装上增加防护和控制措施,并及时对修理产生的多余物进行清理。
3.2 “导电环信号传输异常”的改进措施
(1)通电时的热效应使得导电环刷丝压力变小,因此,在设计时加入“冷流”措施,同时对平台中加热回路、电源回路等大功率的回路采用多路导电环并联分流的措施。
(2)在产品修理中对导电环的接触电阻及波动阻值进行检查,剔除接触电阻及波动阻值超差的环路,排除导电环接触不可靠的隐患。
(3)修理过程的各环节注意多余物的防护,避免多余物进入导电环内部污染导电滑环沟槽,造成信号传输异常。
3.3 “力矩电机输出力矩降低”的改进措施
(1)优化力矩电机制造工艺,更改电刷材料,由原来易磨损、易受硫化的银石墨改为电化石墨;更换长期稳定性更好的电刷簧片以增加电刷的压力,使电机电刷与换向器接触更可靠[5]。
(2)在修理中重点检查力矩的静态及动态阻值,对阻值超差严重或换向器表面积碳严重的电机予以换新。
4 结语
分析了平台式惯导系统伺服回路的故障机理,对惯性平台中容易出问题的部件提出了改进措施。通过实施改进措施,降低了平台式惯导系统伺服回路故障的发生率,提高了产品的可靠性。但是,平台式惯导系统作为精密的机电产品,其机械式的环框结构、脆弱的惯性敏感元件和精密轴承等组件,很大程度上成为故障多发因素,这种固有的机械特性决定了其可靠性难以有一个数量级的提高。但因其在飞机上的重要性,其性能超差或功能失常等故障都将影响部队的飞行训练任务,所以,我们需持续关注与收集惯导系统的故障模式,深入分析故障机理,研究制定改进措施,在产品修理中重点检查与实施,以排除故障隐患,保证产品质量。
[1] 李海霞,高中毓,张嵘,等.四轴陀螺稳定平台的变结构分区控制[J].清华大学学报(自然科学版),2010,57(4):1023-1028.
[2] 贡志波,赵鹏飞,李宏彬.惯性导航系统稳定回路故障分析[J].航空维修与工程,2016,296(2):38-40.
[3] 朱家海.惯性导航[M].北京:国防工业出版社,2008:243.
[4] 张东荣,鲁志勇.平台惯导系统外环支承结构的优化改进设计[C]//中国惯性技术学会. 2010年惯性技术发展动态发展方向研讨会文集.北京:中国惯性技术学会,2010: 100-103.
[5] 齐广锋.机载平台惯导系统稳定回路故障分析[J].现代导航,2014,5(4):272-276.
[责任编辑、校对:东 艳]
Fault Analysis and Improving Measure for the Servo Loop of Platform Inertial Navigation System
GONGZhi-bo1,ZHUTian-hui1,PENGPeng1,ZHANGRui-min2
(1.Maintenance Center,Shijiazhuang Haishan Aviation Electronics Technology Co.,Ltd.,Shijiazhuang 050208,China; 2.Scientific Research Department,Shijiazhuang Haishan Industrial Development Co.,Ltd.Shijiazhuang 050208,China)
Starting with the servo loop system of platform inertial navigation system,the article makes the analysis and research of reasons for servo loop faults,proposes tailored improving measures,and fulfills such measures in product repair,thus effectively lowering the fault rate of servo loop and improving the reliability of products.
platform inertial navigation system;servo loop;improving measures
2017-04-12
贡志波(1983-),男,河北灵寿人,工程师,主要从事机载惯性导航系统的修理与研究。
V249. 32+2
A
1008-9233(2017)03-0012-04
