基于CAN总线的大型停车场智能引导系统设计
2017-07-02
(东莞理工学院城市学院,广东 东莞 523419)
近年来,人们经济水平的提高和汽车行业的迅速发展,使得我国汽车保有量急剧增加,机动车辆增长速度已远远超过公路停车场等交通基础设施的增长速度。以北京为例,2009年城市汽车保有量为480.9万辆,经营性停车场5 194个,经营性停车位总数达125万个。截至2014年底,全国机动车保有量达2.64亿辆,机动车驾驶人突破3亿。其中汽车驾驶人超过2.46亿,驾龄不满1年的驾驶人2 967万,占总数的9.82%。全国平均每百户家庭拥有25辆私家车,北京每百户家庭拥有63辆,广州、成都等大城市每百户家庭超过40辆。根据政府部门和城市交通管理部门的统计,停车场的数量以及停车位的数量都很有限,我国城市机动车停车位与保有量比例为1﹕5,停车位的占有率只有20%左右[1],经济发达的大中城市这一比例则更低。远远小于汽车总量的停车位,已经不能满足当前用户的停车需求,直接造成了城市停车难问题,且日益严重。
“车多位少”“停车难”不仅让有车族头疼,也影响城市交通有序和畅通,成为广大老百姓关心的问题。同时,长时间的寻找停车位不仅是一种能源的浪费,更带来环境污染和噪声污染。因此,采用先进的计算机技术、网络技术、物联网技术等使城市停车管理及引导系统能够实现精确、高效、全时段和全方位的城市车位管理,给城市管理机制带来了创新和突破是非常必要的,具有十分重要的现实意义。
一、整体方案设计
基于CAN总线的大型停车场智能引导系统按功能可分为四层:感知层、网络层、信息层和决策层。感知层由终端探测单元将车位信息通过CAN总线上传;网络层通过协议转换将信息上传至后台管理计算机及数据库;信息层对数据库数据信息通过云计算、数据分析管理、流量监控、数据存储等,实现如WEB百度地图、搜索引擎、信息安全等各种公共服务平台对数据的访问及应用;通过信息层的平台开放接口,政府部门、交通局、旅游区、车辆辅助控制、手机客户端等做出对应决策行为[2-4]。
该智能引导系统主要由车位探测器、控制器、LED显示屏、行车指示灯、计算机管理系统等组成,系统的结构拓扑图如图1所示。实现的功能主要有以下几点:1.LED显示屏可以显示总剩余车位数量和各区剩余车位数量;2.车辆探测器指示灯引导快速停车。车辆探测器指示灯安装在过道等明显地方,使驾驶员可以很远就发现前方是否有空停车位并快速的找到停车位停车;3.公众可通过停车APP实现车位查询、车位预订、错时停车等功能;4.为管理者提供真实、可靠的分析数据,提高停车场管理水平;5.集中管理,将数据汇总,并进行数据挖掘和分析,为政府相关部门运营决策提供支持;6.通过道路车流数据分析,对停车位规划和管理手段的实施效果进行量化评估;7.对路内、路外停车场的停车数据进行统计和分析,为城市停车位的规划布局提供决策依据;8.开放数据接口,用于集成和扩张。

图1 基于CAN总线的大型停车场智能引导系统拓扑图
二、硬件设计
根据总体结构设计,本系统硬件设计主要由主控芯片模块、电源模块、车位检测器、行车指示灯、通讯设计、控制器及LED屏显等部分组成,系统硬件结构框图如图2所示。

图2 系统硬件结构框图
(一)主控芯片设计
本系统采用以STC15W408AS单片机为核心的方案。STC15系列单片机采用STC-Y5超高速CPU内核,在相同的时钟频率下,速度又比STC早期的1T系列单片机(如STC12系列/STC11系列/STC10系列)的速度快20%。增强型单片机比普通8051的快8~12倍,工作电压是2.5-5.5V。STC15W408AS内部有8K字节片内Flash程序存储器,擦出次数10万次以上,有片内EEPROM功能。
(二)电源设计
性能稳定的电源是系统稳定工作的前提。考虑到系统因多节点和远距离供电下的电压衰减现象而导致的设备供电不稳定,系统选用LM2576-5.0电源芯片为各模块供电。该电源芯片是3A电流输出降压开关型集成稳压电路,它内含固定频率振荡器(52kHz)和基准稳压器(1.23V),并具有限流及热关断电路等完善的保护电路,只需极少的外围器件便可构成高效稳压电路,且其输入电压为7~40V,工作电压比较宽。
(三)车位检测器设计
车位检测器是通过超声波测距来实时采集车位信息,并将车位状态通过红绿指示灯显示出来,让驾驶者一目了然知道是否有车位。本系统选用US-015超声波模块。US-015是目前市场上分辨率最高,重复测量一致性最好的超声波测距模块,分辨率可达0.5mm,测距精度高且可实现2cm~4m的非接触测距功能,供电电压为5V,工作电流为2.2mA,支持GPIO通信模式,工作稳定可靠。模块测距的时序如图3所示。

图3 US-015测距时序图
如图3所示,只需在Trig管脚输入一个10US以上的高电平,系统便可发出8个40KHz的超声波脉冲,然后检测回波信号。当检测到回波信号后,通过Echo管脚输出。根据Echo管脚输出高电平的持续时间可以计算距离值。超声波的速度与温度有关,但在精度要求不严格的场合可以忽略温度所带来的影响,否则就应通过温度补偿的方法加以矫正。
(四)行车指示灯设计
行车指示灯的作用在于指示某一区域总体的停车情况,如果该区域车位已满,行车指示灯就在这区域的路口提前显示已满(用红灯表示),避免司机朋友增加不必要的停车时间,从而带来不必要的能源消耗与环境污染问题。该行车指示灯的安转位置如图4所示。图中在入口的路口中有三个行车指示灯,自下至上代表着相应区域的车位情况,最下面区域的车位已经停满,所以在入口处左拐的行车指示灯显示红色,提前告知司机此区域已经停满了,没有车位了。中间区域有空车位所以入口处直行的行车指示灯是绿色,进入此区域的司机接下来就需要通过车位指示灯来引导到有空车位的区域,方便快速找到车位。

图4 行车指示灯使用位置
(五)通讯设计
本系统采用CAN总线通讯方式。CAN控制器是采用Microchip的MCP2515,它是一款独立控制器局域网络协议控制器,完全支持CANV2.0B技术规范,能发送和接收标准和扩展数据帧以及远程帧。MCP2515自带的两个验收屏蔽寄存器和六个验收滤波寄存器可以过滤掉不想要的报文,因此减少了主单片机(MCU)的开销。MCP2515与MCU的连接是通过业界标准串行外设接口(Serial Peripheral Interface,SPI)来实现的。
CAN接收器采用TJA1050,可以为总线提供不同的发送性能,为CAN控制器提供不同的接受性能。其在原有产品上做了改进之后,使得CANH和CANL理想配合,将电磁辐射减到更低,同时在有不上电节点时,性能有所改进。其自身所附带的限流电路,保护发送器的输出级,使由正或负电源电压意外造成的短路不会对TJA1050造成损坏[5-9]。
(六)控制器及LED屏显
控制器功能是将CAN总线上的信息通过处理得到我们需要的信息,将还有多少车位信息用LED屏显示出来,司机在没有进入停车场的时候就提前得知下面是否有空车位。
1.控制器
控制器由主控芯片STM32单片机和CSM100组成。CSM100系列UART转CAN模块集成微处理器、CAN-bus控制器、CAN-bus收发器、DC-DC转换、高速光电隔离于一体。该产品可以很方便地嵌入到具有 UART接口的设备中,在不需改变原有硬件结构的前提下使设备获得CAN-bus通讯接口,实现UART设备和CAN-bus网络之间的数据通讯。其中UART通道支持多种波特率。
CSM100将CAN总线上的信息通过UART的形式输出,利用CSM100操作CAN-bus就如同操作UART一样方便。如图5所示为CSM100系列模块的功能框图。主控芯片同样通过UART将CSM100输出的信息接收到主控芯片中,进行处理得到具体空车位信息。

图5 CSM100系列模块的功能框图
2.LED屏显
LED屏幕采用市场上单红色P10点阵屏。控制器将信息处理好之后,将数据通过RS232传输发送到LED控制板上,从而实现空车位数量的实时显示。
三、后台软件设计
后台监控系统是用Visual C++基于Windows平台设计的用户程序。其思路是车位探测器对不同ID的车位进行探测。为了保证数据足够准确,每一个探测器需要统计规定时间内的所检测得到最多信号,并以这个信号为准,把对应车位的ID和车位信息拼接成一种符合CAN数据帧的格式上传到CAN总线,然后经过CAN转TCP/IP模块,上传至后台监控软件,同时将数据存储进数据库,管理员就可以通过后台监控软件时刻查询了解停车场的实时情况。结合后台软件的监控、日程安排、告警、事件管理和群组管理等功能,实现图形化管理整个停车场,以电子地图的形式直观显示当前停车场的车位信息,用丰富的色彩标识不同类型的车位和区分车辆停泊时间,从而实现车牌识别、计费、发票打印、历史数据查询和统计、报表生成等功能[10-15],功能结构如图6所示,软件流程图如图7所示。
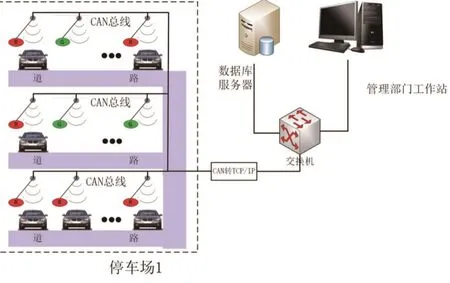
图6 功能结构图

图7 软件流程图
后台监控软件设计的核心是数据采集系统设计。数据采集系统主要把CAN转TCP/IP转换器上传的数据进行逐一的采集分析并保存至数据库。数据采集流程如下图8所示。

图8 数据采集流程图
作为后台服务器的一个采集系统,要与转换器取得相互之间的通信,首先需创建socket,如果创建不成功,则需要重新创建;反之,绑定本机的IP和端口号,供客户端进行连接,此时等待着接收转换器发来的数据。为了能够存储转换器的数据,得建立一个数据库,库中根据需要创建两个表:状态表和流水表,把相对应的字段进行罗列和创建,当采集系统接收到数据时,需要把ID号和信号拼接成一条符合数据库中的表的规则的记录,然后进行存储,最后根据不同的数据,进行实时更新数据库里面的数据。
四、小结
针对停车场和停车位的分布性特点,设计了基于CAN总线的大型停车场智能引导系统,利用超声波测距原理能够准确地检测出车位使用状态信息,采用4级拓扑结构,将停车场诱导、控制、管理集成一体,遵循TCP/IP协议,将位于整个城市不同地方的停车场通过Internet连在一起,组成城域级综合停车管理系统。电源的直流传输和LED光源的使用,使整系统安全、节能;同时系统安装简单、方便维护。该智能引导系统大大缩短了车主寻找车位时间,提高了停车场的使用率;同时也降低了工作人员的劳动强度,为减少无效交通、提高驾车出行效率、缓解“停车难”问题、节能减排、改善城市道路交通环境等问题提供便利,非常适用于各种大中型停车场和旅游区、火车站和购物中心等公共停车场。
参考文献:
[1] 吴若伟.大型停车场智能泊车引导关键技术研究与系统开发[D]南京:南京航空航天大学,2013.
[2] 吴涛.停车引导和信息系统一ITS在停车领域的应用[J].国外公路,2000,29(02):4-6.
[3] 刘云浩.物联网导论[M].2版.科学出版社,2013.
[4] 赵艳莉.德国科隆市停车诱导系统[J].国外城市规划,2002(03):45-46.
[5] 邓应伟.停车场智能管理系统[D].长沙:湖南大学,2006.
[6] 李鹤.以创新引领中国智慧停车场走向世界——访厦门科拓通讯技术股份有限公司总经理孙龙喜[J].中国安防,2013(06):95-98.
[7] 杭州立方自动化工程有限公司.上海大众立体停车楼智能引导系统应用案例[J].物联网技术.2014,4(11):7-8.
[8] 杨彪.浅谈中国智能停车场系统集成技术[J].中国公共安全.2013(09):168-171.
[9] 钟新跃.基于CAN总线的停车场智能引导系统[J].电视技术,2011,35(21):58-61.
[10] 耿寸召.基于ZigBee技术的停车场车位检测系统设计[D].呼和浩特:内蒙古大学,2013.
[11] 雷玉玲.大数据时代的智能停车[N].中国交通报,2015-01-15(006).
[12] Russell G.ThomPson. A Parking Seareh Model[J].TransPortation Research Part A32,1998:159-170.
[13] 李缨,徐亚国.城市停车管理及停车诱导信息系统的设计[J].警察技术,2004(06):38-40.
[14] 刘勃,宋庆恒,胡三庆.基于RFID的停车场智能管理系统[J].计算机与数字工程,2008(05):153-155.
[15] 范红丽.我国大城市停车诱导信息发布系统的模型与方法研究[D].北京:北京交通大学,2008.
