基于AgisoftPhotoscan的图像三维重建及精度研究
2017-07-01缪盾,吴竞
缪 盾,吴 竞
(同济大学 浙江学院,浙江 嘉兴 314051)
基于AgisoftPhotoscan的图像三维重建及精度研究
缪 盾,吴 竞
(同济大学 浙江学院,浙江 嘉兴 314051)
通过普通相机获取图像信息,计算三维空间物体的几何信息,重建和分析物体的基本原理;了解图像处理软件Agisoft Photoscan的工作流程,并设计实验;通过未检校的普通数码相机对某雕塑头像和亭子进行拍摄,使用Agisoft Photoscan软件对图像进行处理,得到三维点云数据,进行物体三维重建,验证三维重建的有效性;通过提取和实测预设对比点的三维坐标值,求取误差,验证在百幅以内的图像建模误差在1 cm以内。此方法可应用到表面复杂的异形物体建模中。
三维重建;图像;三维点云
三维模型承载的信息量远比透视成像形成的二维图像的信息量多,而且三维模型的可视化环境更加符合人类的思维惯性,因此根据在不同视点上所获取的二维影像来重建空间物体的三维模型,成为数字摄影测量和计算机视觉领域的研究热点。目前比较流行的非接触式三维重建方式主要有两种。一种是基于三维激光扫描仪点云数据的三维重建,一种是基于数字图像进行的三维重建。三维激光扫描点云进行的三维重建,通过发射和接收激光束获取点云三维坐标,重建精度高,信息量丰富,但是仪器价格昂贵,操作专业,普及率不高。而基于数字影像的三维重建,通过匹配被测物体不同数字图像中的同名点,交汇得到空间点的三维坐标,操作简单,特别是近些年,随着数码相机的成像质量和分辨率的大幅度提高,以及数码相机的高性价比,使得基于图像的三维重建模型有了更广阔的发展空间。
1 基于图像的三维重建原理简述
通过不同图像中对应像素间的视差,反推出场景中目标物体的空间几何形状和位置。假设在两幅图像上有一对同名点,位于左片的PL点和位于右片的PR点,则由两幅图像的投影中心出发分别经过这一对同名点的两条直线在空间中交会于一点P,可以恢复出真实场景中物体表面上某一点的三维坐标[2-3],如图1所示。

图1 三维重建示意图
2 实验验证
2.1 数据获取
获取数字图像之前可在被摄区域设置测量控制点,以4~5个为宜,尽量避免沿一直线或一个很小区域布设,布设控制点的目的是为了将重建的点云数据纳入控制点坐标系中。如果只需要独立模型,不需要与周围环境或物体的联系,也可不设置控制点。像片拍摄时要保持每两张相邻像片之间的重复区域在50%~60%。不同种类的物体采用不同类型的拍摄方式,主要的拍摄方式有环视拍摄和多视平行拍摄,拍摄影像的总体原则是图像清晰[4]。如图2所示。

图2 拍摄方式示意图
2.2 三维重建与数据输出
本文引入Agisoft Photoscan软件对非量测数码相机获取的相片进行一系列处理,其基本流程如图3所示。
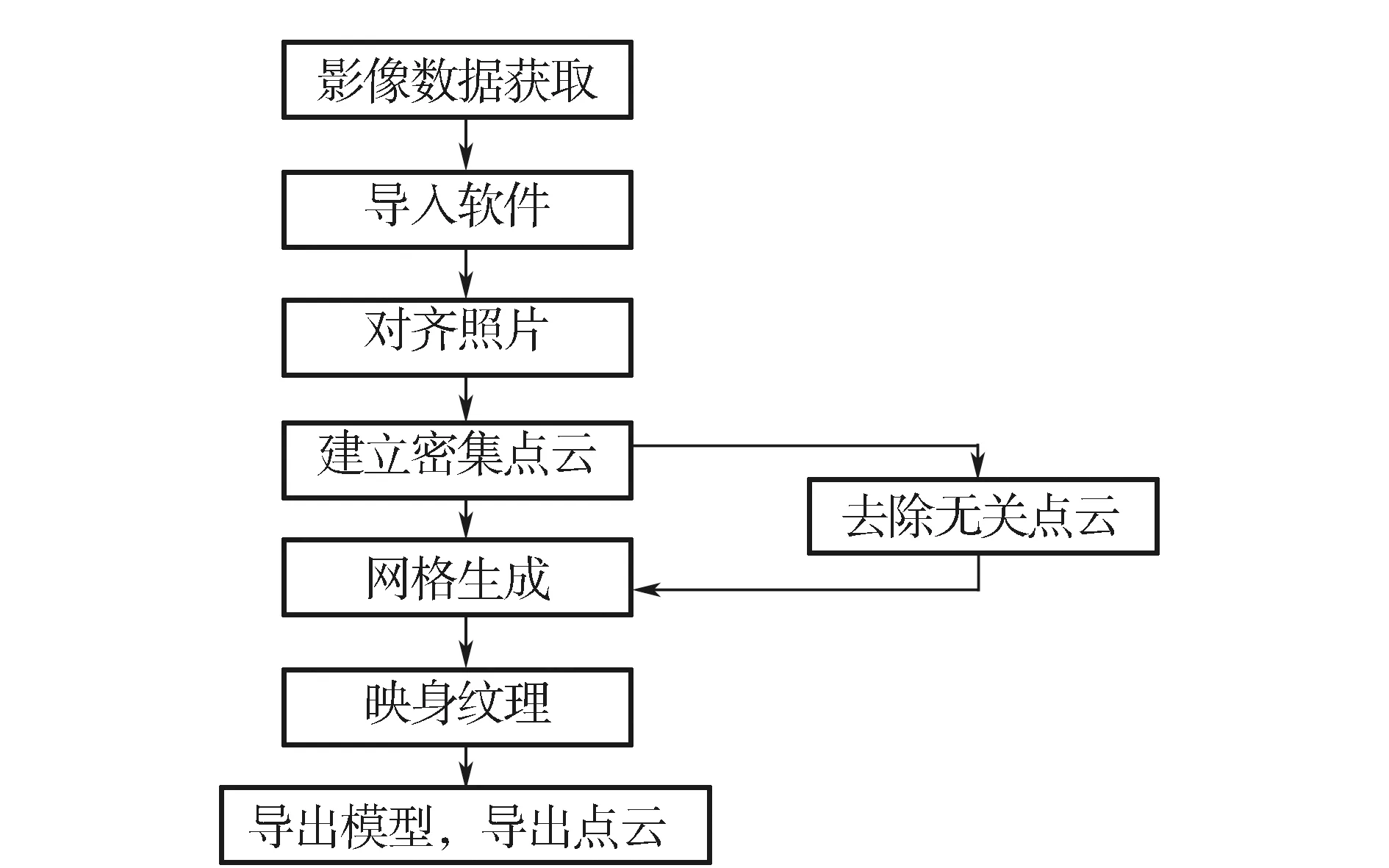
图3 三维重建流程
把外业获取的60张相片载入软件中,通过“对齐照片”,将相邻相片重复率小于50%的伪片自动删除,此类相片由于缺少同名点参照,无法恢复出相机、相片和实物的相对位置,对齐相片中的同名点以像素形式显示真实位置,如图4所示。

图4 对齐照片展示
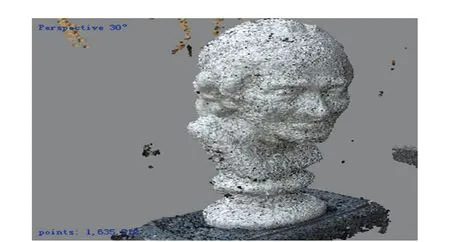
图5 密集点云模型
此时获得了头像模型的稀疏点云模型,通过内插法建立密集点云,选择最高级别后共生成163万个空间像素点,如图5所示。生成网格并进行纹理映射,结果如图6所示。
雕塑头像下巴位置由于缺少从下向上的照片,导致点云数据稀少,形成模型表面的空洞和偏差,可以通过后期增补照片来补充点云密度。理论上,图像数量越多,像素越高,重建的效果越好,但是对计算机性能的要求也会提高,耗费的时间也会增长。建好的模型通过软件可以导出不同格式的点云文件,如.dwf格式可以导入AutoCAD中,为模型优化和分析提供方便。
2.3 精度检验
理想情况下,三维模型应与真实物体形状、尺寸等一致,但是在实际操作中,由于数据源、构建方法等问题, 不可避免地会出现一定的误差。为了检验利用Agisoft Photoscan软件生成的三维模型的精度,在雕塑头像上插入5根大头针,作为精度对比点,建模后导出大头针针头所处点的三维坐标值,再通过苏一光全站仪测量得到大头针针头的实测坐标,将坐标值转换至同一坐标系下,如图7所示。

图6 雕塑头像三维模型展示
提取5个对比点的两组三维坐标数据,求出模型对比点的误差(以全站仪实测数据为标准值)其误差如表1所示。
坐标误差均在7.5 mm以内,点位误差在1 cm以内,此实验建模过程使用了60张照片,如果增加照片数量,同名点之间的约束变多,点位精度也会随之提高。
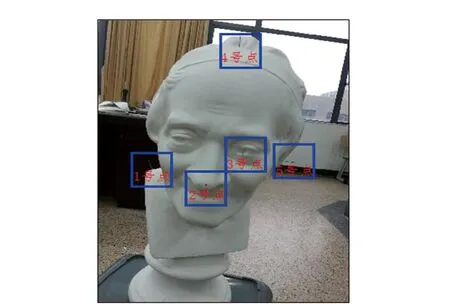
图7 比对点位置

表1 对比点三维坐标值
2.4 室外实验验证
为了验证建模的可行性和通用性,将实验环境移至室外,选取了某小区内一亭子作为建模对象,获取80张像片,通过软件建立了三维模型,如图8所示。

图8 室外亭子模型
由于亭子顶部没有获取照片,亭子模型顶部出现了比较大的偏差,可以通过后期补获照片增加像素点云来增强模型准确度。通过全站仪实测亭子立柱下方的观测点,对比点位误差,如图9所示。
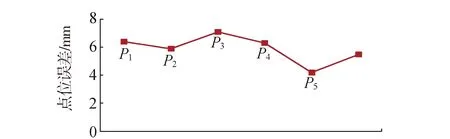
图9 点位误差统计
点位误差均在8 mm以内。此次实验中,像片获取时间约30 min,建模时间约为2 h,大大节约了时间成本。
3 结束语
虽然基于图像的三维重建精度还达不到很高的水平,但是其便捷的观测方法,自动化的建模过程,大大缩短了测量时间,且适用于任何复杂场景,尤其是异形物体的建模和尺寸范围较大场景的建模,非接触式观测也避免了人为干预的误差导入,在古文物保护,高危场景作业都有很好的应用前景。
[1] 郑顺义,王瑞瑞,陈长军,等.基于立体相机的三维场景建模[J]. 测绘通报,2008(2):20.
[2] 张楠.基于影像序列重建三维物体的一种方法[D].大连:大连理工大学,2005.
[3] 王宇宙.计算机视觉三维重建理论与应用[D].西安:西北大学,2004.
[4] 张小宏,赵生良,陈丰田.Agisoft Photoscan在无人机航空摄影影像数据处理中的应用[J].价值工程,2013(20):30-31.
[5] HAO Xiangyang,MAYER H.Orientation and auto-calibration of image triplets and sequences[J].ISPRS Archives,2003:123-127.
[责任编辑:李铭娜]
Research on 3D image reconstruction and accuracy of based on Agisoft Photoscan
MIAO Dun,WU Jing
(Zhejiang College,Tongji University,Jiaxing 314051,China)
The basic principle of reconstructing and analyzing the objects is studied by acquiring the image tuinformation from the ordinary camera and calculating the geometric information of the three-dimensional objects. This paper introduces a workflow of Agisoft Photoscan, and designs an experiment. The image is processed by Agisoft Photoscan software, and the 3D point cloud data is obtained. The three-dimensional reconstruction of the object is carried out. The validity of the proposed method is verified. The 3D coordinate values of the five contrast points are extracted and measured, and the error of the model is verified to be within 1 cm. The method can be applied to the surface complex modeling of alien objects.
three-dimensional reconstruction; image; 3D point cloud
2017-02-13
浙江省教育厅科研项目(Y201636365)
缪 盾(1984-),女,讲师,硕士.
著录:缪盾,吴竞.基于AgisoftPhotoscan的图像三维重建及精度研究[J].测绘工程,2017,26(8):41-44.
10.19349/j.cnki.issn1006-7949.2017.08.009
TU198+.3
A
1006-7949(2017)08-0041-04