基于光电技术的太阳能无人机设计
2017-06-30杨顺朋臧一鸣贾春荣
杨顺朋+臧一鸣+贾春荣
摘 要:太阳能无人机是以太阳能电池及蓄电池为能源的适合长时间滞空作业的无人机。由于有两种动力来源避免了单一动力带来的弊端。通过在机翼上表面合理的铺设太阳能电池阵列,将其产生的电能作为主要动力来源。通过在地面试验,在太阳能电池工作与否情况下动力系统工作的时间对比可以看出,由于太阳能电池对锂电池的浮充,动力系统的运行时间得到显著延长。考虑到平飞时电流较小,延长的效果将更加明显。
关键词:太阳能;无人机;长滞空;光电技术
中图分类号:TP731 文献标识码:A 文章编号:1671-2064(2017)10-0055-02
1 引言
无人机是是一种以无线电遥控或由自身程序控制为主的不载人飞机。与载人飞机相比,它具有体积小、造价低、使用方便等优点。在军用和民用领域都具有很广的用途[1]。但传统的无人机采用燃料或蓄电池作为能源,飞行时间短、而且石油资源也日益枯竭。利用太阳能为主要动力,蓄电池为辅助动力的太阳能无人机应运而生[2]。它的滞空能力要比传统动力无人机要强,而且无污染,将适用于更广泛领域。
国外研究较早,主要的公司有谷歌、美国Aero Vironment公司、美国Air Ship Technologies公司。目前AeroVironment 公司的太阳能Puma AE无人机仍处于研究和升级阶段;美国Air Ship Technologies公司生产一款名为V2的太阳能无人机,由于配有高效率的氢氧燃料电池续航可高达五天[3]。国内对太阳能无人机研究较晚,不过进展不算慢。但是太阳能无人机做得比较好的只有中航集团十一院和汉能集团。可以实现连续飞行几十个小时。
2 设计原理
太陽能电池是通过光电效应或者光化学效应直接把光能转化成电能的装置。太阳光照在半导体p-n结上,形成新的空穴电子对,在p-n结电场的作用下,空穴由n区流向p区,电子由p区流向n区,接通电路后就形成电流。这就是太阳能电池的工作原理——光电效应。
根据流体力学的流体连续定理和伯努利定理可知翼型的选择是升力产生的关键。飞机升力绝大部分由机翼产生,尾翼通常产生负升力,其他部分产生的升力通常不考虑。
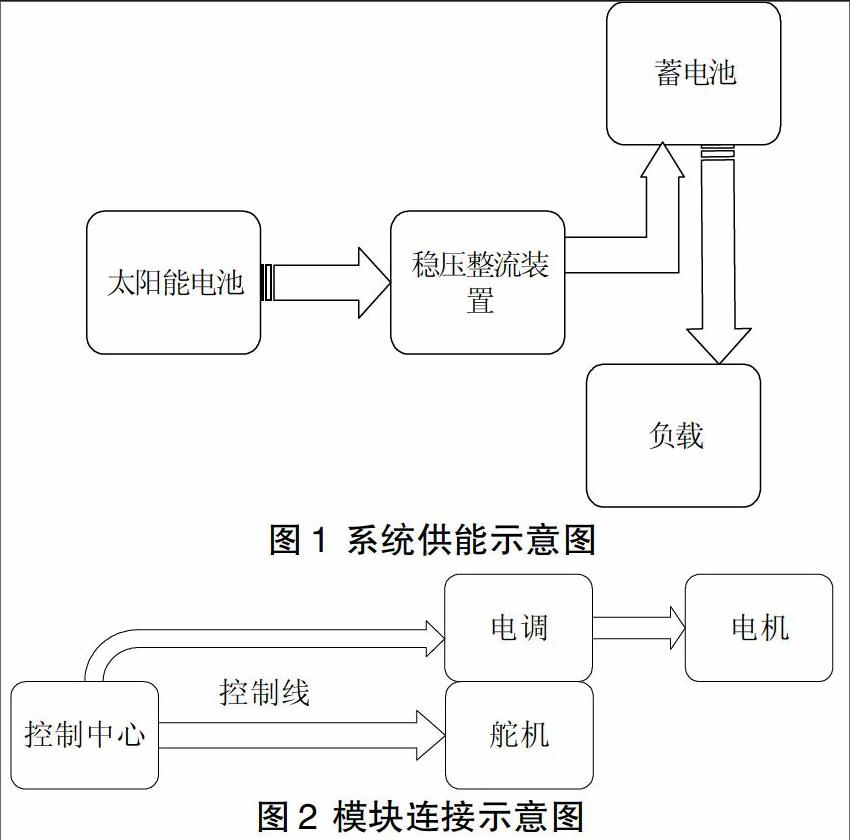
工作原理:白天,依靠机体表面铺设的太阳电池将吸收的太阳光辐射能转换为电能,维持动力系统的运行,同时对机载电池充电,存储电能,在起飞阶段电机需要较大电流时,由锂电池辅助供电,达到平飞状态时切换为太阳能直接供电;光强减弱时,太阳能无人机释放电池中储存的电能,维持整个系统的正常运行,以增加无人机的续航。供电系统如图1。
3 整体设计
为了使得减轻整体重量采用KT板材作为机身材料,同时用碳纤维杆加固机身以增强机身强度。由于需要负载较大,太阳能电池转化效率必须得高,单晶硅太阳能电池规模生产的转化效率19.3%(2014),实验室最高效率为25.6%。所以采用单晶硅太阳能电池,具体规格:125*125*0.1mm;功率:3W质量:2g,共采用24块。由于能源系统中有太阳能电池组件的存在,白天在飞行中消耗能量的同时还要从太阳能中获取能量,获取能量的多少又与飞行姿态和轨迹相关[4],所以需要研究航行规划与飞行控制的耦合;根据将来的飞行高度、速度和弦长可以用Profili计算出雷诺系数,然后由雷诺系数选择合适的翼型;本实验采用BE12305B翼型。由于机翼的曲面特性,不利于太阳能电池阵列的铺设,翼型上需要铺设电池片的位置用直线代替原来的曲线。
利用太阳能电池充电,充电电流随日照变化而变化,一个理想的系统应该能够稳定充电电流而不至于变化过于剧烈[5]。太阳能电池阵列和负载之间增加一个DC/DC变换器,通过改变DC/DC变换器中功率开关管的导通率,来调整、控制太阳能电池阵列输出电流。电池串联则电压相加,并联则电流相加。串联之后的电池片总电流并不增加,又需要将串联后的若干组电池片相并联,这样才能基本达到动力能源的需求。
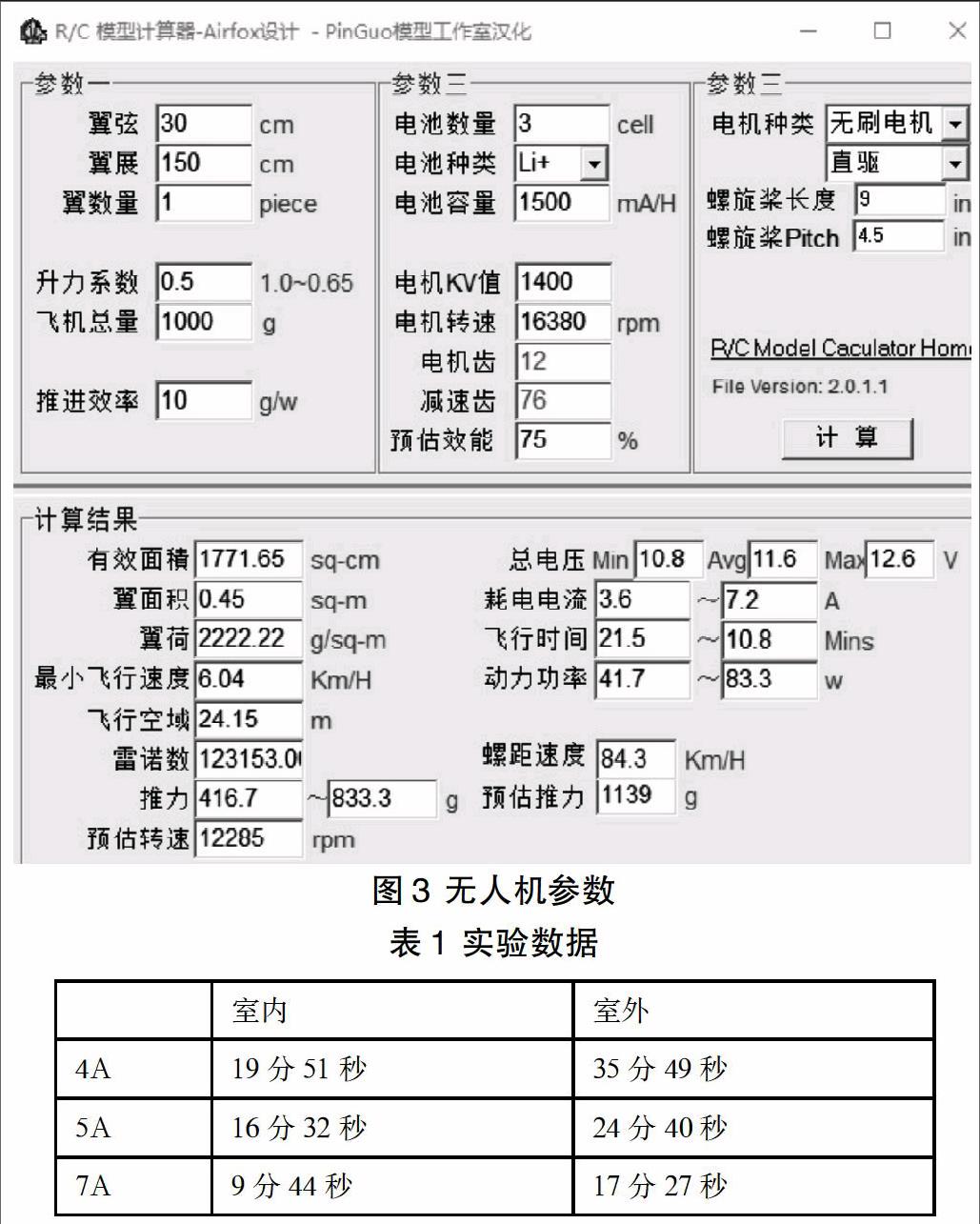
飞行控制系统是无人机的核心。电调和舵机都要和控制模块相连。动力由无刷电机和电调产生拉力,方向控制则由舵机控制舵面进行动作。模块连接图2,整体参数如图3。
当前太阳能无人机的气动布局形式主要有常规布局和飞翼布局两种。常规布局是早已有之的布局形式,设计方法比较成熟,技术风险低,适合于太阳能无人机的初期设计。为铺设更多的太阳能电池片以及获得更好的滑翔性能,机翼为大展弦比的矩形翼,起落架采用后三点式,两个主轮左右对称地布置在重心稍后处,左右主轮有一定距离可保证飞机在地面滑行时不致倾倒。
4 实验结果
室内(无太阳能电池),将3节锂电池充满电(12.6V)后,电机开始在一稳定电流下工作并开始计时,时刻监测锂电池电压,降低到11.1V时计时结束。
对比:室外(由太阳能电池),正午12点,将两节锂电池充满电(12.6V)后,电机开始在同一稳定电流下工作并开始计时,时刻监测锂电池电压,降低到11.1V时计时结束。实验数据如表1。
从实验数据可以看出,由于太阳能电池对锂电池的充电作用,动力系统的运行时间得到显著延长。考虑到平飞时电流较小,延长的效果将更加明显。
5 结语
本文对其整体系统进行研究实验,确定部件选型,设计合理,已做出实物航行,整体性能可靠。随着太阳能薄膜电池发电效率的发展,将来可以更好的融入到无人机中。新能源技术的不断发展,新能源飞机设计受到了越来越广泛的关注[6]。
参考文献
[1]秦博,王蕾.无人机发展综述[J].飞航导弹,2002,(8):4-10.
[2]张蕾,国外无人机发展趋势及关键技术[J],电讯技术,2009,49(7):88-92.
[3]Swider Lyons KE,Mackrell JA,Rodgers JA.Hydro-gen fuel cell propulsion for long endurance small UAVS. AIAA Centennial of Naval Aviation Forum 100 Years of Achievement and Progress[C],2011.
[4]杨金焕,陆钧,黄晓橹太阳能发电地面应用的前景及发展动向[J].中国新能源,1995,(12):96-99.
[5]张锐,薄膜太阳能电池的研究现状与应用介绍[J].广州建筑,2008,(2):12-16.
[6]李荣,太阳能无人飞机动力驱动器的研究[J].西安:西北工业大学,2004,(2):34-39.
