航空气象雷达技术研究
2017-06-30宋金泽
宋金泽
摘 要:早在二战时期,人们就发现雷达不仅可以探测飞机、舰船,还可以探测云、雨,这些气象目标催生了专门观测气象的气象雷达。目前,多普勒制式的气象雷达可以方便地探测大范围的天气情况,并在其强度、速度、谱宽3个基本产品的基础上,利用各种算法完成检测和预报灾害天气、估计降雨量等工作。气象雷达已成为人们研究气象规律、探测和预报自然灾害不可或缺的有力工具,气象服务对人民安全、社会经济,乃至军事国防都具有重大意义。
关键词:航空气象 雷达 技术研究
中图分类号:V321.2 文献标识码:A 文章编号:1003-9082(2017)06-0012-02
如今,航空运输业正以勢不可挡之势蓬勃发展,在带来巨大的经济社会效益的同时,也对航空安全、航空流量和航空舒适性等指标提出了越来越高的要求。根据美国国家研究委员会1995年的报告和飞行安全基金会2004年关于事故安全和趋势的NALL报告,大约所有飞行事故的1/4,所有致命飞行事故的1/3都和灾害气象有关。此外,美国联邦航空局(FAA)2004年的航空容量加强计划还指出,灾害天气导致的15分钟以上系统延误占了总延误的3/4,而这些都可以借由航空气象雷达探测到的气象状况得到较好解决。预计到2025年,整个航空市场要比现在大2倍。空域的拥挤不仅要求空管系统更加有效率,更要求航空气象服务部门能够提供准确及时的灾害气象检测、预报与分发服务[1]。由此可见,航空气象雷达的重要性必然与航空业的发展同步增长。
航空气象雷达依据其部署与管辖区域的不同可以分成三类:区域航路气象雷达,如NEXRAD(Next-Generation Radar),终端气象雷达,如TDWR(Terminal Doppler Weather Radar)、LIDAR(Light Detection And Ranging),和机载气象雷达。NEXRAD用于监视区域气象,TDWR和LIDAR是为了弥补NEXRAD在机场终端区域的不足而研发的。此外,由于受到地基设施完备性、预报准确性以及空地通信及时性等限制,仅仅依靠地面探测还不足以保证飞行安全,大型民用客机仍需强制安装具有气象、湍流、低空风切变探测等功能的机载气象雷达。
一、气象雷达探测基本原理
航空气象灾害种类繁多,概略说来主要有强降水、湍流、积冰、雷暴以及随之而来的微下击暴流和闪电、由地形等原因引起的风切变和湍流等。
气象雷达技术从非相干时代经过长期发展到相干时代,并将过渡到双极化时代。非相干气象雷达仅能探测到回波功率,提供的信息有限。脉冲多普勒相干气象雷达出现于上世纪80年代,通过测定接收信号与发射信号频率之间的差异,能比以前多测雷达取样体积内的径向多普勒平均速度和谱宽。目前性能更为先进的雷达则是双极化雷达,又称偏振雷达,它具有多普勒相干雷达的全部优点,在降雨估计、降水粒子分类、数据质量和灾害探测方面还另有提升。
1.气象回波探测原理
大气中引起电磁波散射的主要物质是大气介质(包括大气气体分子的散射,以及大气介质折射率分布不均匀引起的散射与反射)、云、降水粒子等,云、降水粒子的散射情况随相态、几何形状不同而异。
雷达接收到的信号是诸多单个回波功率的和,径向上的分辨率单元叫做库,为了使不同波长的雷达照射同样目标取得的回波功率可以直接比较,引进雷达反射率因子。雷达反射率因子和粒子直径的六次方成正比,即少数大水滴将提供散射回波功率的绝大部分。粒子的散射使原来入射方向的电磁波能量受到削弱,即为衰减。为了使原本同一强度的气象状况不因距离雷达远近而有所差异,系统需要对远处的回波进行一定的补偿。
2.径向速度探测原理
在多普勒气象雷达发射一个个脉冲波进行探测的过程中,随风移动的降水粒子使相继脉冲波散射的回波信号之间有相位变化。假设多普勒雷达与目标之间的距离为r,则雷达波发生目标到散射波返回天线所经过的距离为2r,相当于个 波长,用相位来衡量相当于 个弧度。若所发射的电磁波初始相位为,那么电磁波被散射回到天线时的相位应是 。若在相继脉冲的时间间隔T内,目标物沿径向变化了距离,相应的相位变化为 ,所以相位的时间变化率,即角频率为 ,多普勒频移为 ,为目标物在雷达径向上的运动分速度,称为多普勒速度[2]。
3.湍流探测原理
湍流是指微粒速度偏差较大的气象目标,只与微粒速度的统计标准差有关。不同直径的降水粒子具有不同的下落速度,雷达探测到的径向速度也就具有一定的分布,降水粒子直径差别越大,则多普勒速度的分布谱宽就越大。影响谱宽大小的非气象因素有:天线转速,转速越高,谱宽值越大;与雷达的距离,距离增加,距离库变大,距离库内的速度具有较大方差的概率也变大,所以谱宽也增加。谱宽可以用做速度估计质量控制的工具,谱宽越大,速度估计的可靠性就越小。
4.双极化探测原理
双极化雷达,又叫偏振雷达,同时发射水平方向与垂直方向的极化电磁波。额外的垂直极化电磁波使区分气象回波和非气象回波成为可能,地杂波、海杂波、异常传输路径的影响也都可以通过双极化技术减轻。另外,双极化雷达还拥有雨雪区分、冰雹探测、强降雨率估计和冰冻层识别等能力。该技术可以精确描述冻雨、雪、雨水区域,帮助地勤在冬季风暴期间规划。
5.距离、速度模糊
雷达发射脉冲的重复频率是测量多普勒频率信息的采样频率,按照Nyquist采样定理可知,某一脉冲频率最高只能测量 的多普勒频率,即 。把 关系代入上式,可得 ,考虑到实际上有正有负,所以脉冲重复频率为的雷达能够准确测量的多普勒速度范围为: 。若实际降雨区的平均多普勒速度超出这一范围,就称为速度模糊现象。
如要增加最大不模糊速度的范围,除了选择较长的雷达波长外,只需增加雷达的重复频率F就可以了。但是增加雷达的重复频率,会使雷达的最大探测距离减小,因为 ,式中为光速。可见,当雷达波长选定后,雷达测速范围与测距范围的乘积为定值,要求测距范围足够大时,其相应的最大不模糊速度必然减小,要求测速范围足够大时,其相应的测距范围必然减小[3]。
二、区域航路气象雷达
NEXRAD是由美国研发用于探测降水和大气运动的高分辨率多普勒雷达网,组成该网的雷达称为WSR-88D,工作在S波段(波长10cm),可以显示降水和大气运动的网格图像,以供气象学者识别、跟踪、预测危险天气。WSR-88D有两种可选择的工作模式:低速晴空模式用于分析大气运动,高速模式用于跟踪降水。NEXRAD强调自动化,WSR-88D的天线依据事先定义的体扫模式运动,每种体扫模式都是一组控制天线转速、收发模式、仰角的指令集。选择雷达安装位置时需考虑使雷达探测范围之间有最大的重叠区域,以便应对个别雷达失灵的情况。如有可能,雷达选址还要方便维修。美国本土雷达网的分布几乎覆盖了除美国西部的一些山区外的1万英尺以上的高度。图1为美国(除阿拉斯加、夏威夷)的WSR-88D部署覆盖图。作为区域监视雷达,WSR-88D网络为航空系统提供雷暴跟踪和湍流预警服务。通过把雷暴前端分解为轻、中、重、极重湍流区,叠加在航图上,并实时地与飞行航线比较。飞行员因此得到提前警报,使得飞机可以在不改变到港时间的情况下,只需细微修改航路即可在湍流区域穿行。这不仅提供更平稳的飞行,还可以节省燃油,减少地面延时。
三、终端航空气象雷达
终端多普勒雷达(TDWR)由FAA主持,林肯实验室在80年代末至90年代初设计,现部署在美国45个主要机场,用于加强空中交通安全,布置见图2。
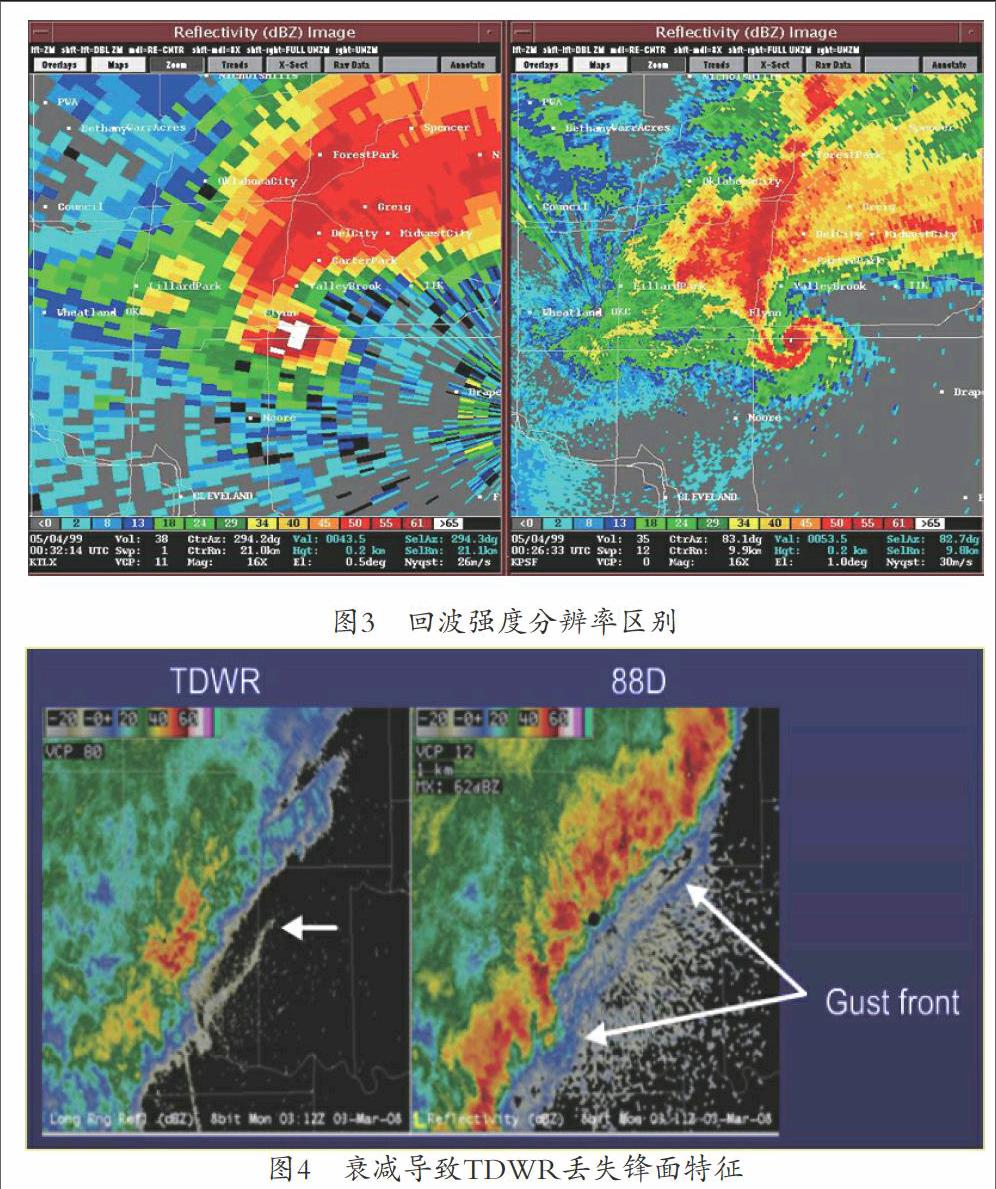
TDWR与WSR-88D都使用被圆顶保护的抛物线状天线,通过线性水平极化扫描一系列仰角来获得空间体信息。两者又有7点不同:①TDWR需要操作员的介入更少;②TDWR使用6cm波段(C波段),WSR-88D使用10cm波段(S波段),这虽然影响到距离折叠和速度折叠,但C波段雷达最严重的问题是衰减;③波束宽度不同,TDWR为0.6°,WSR-88D为1°;④TDWR有更好的距离分辨率,150m或300m,WSR-88D为250m和1000m;⑤兩者与数据质量相关的算法如杂波抑制、距离去折叠和速度去模糊等有显著的不同;⑥TDWR比WSR88-D扫描快,使用的仰角与WSR-88D显著不同,方便监视高速发展的对流天气现象。⑦TDWR是用于短距离分析的。图3表明TDWR比WSR-88D更能够观察风暴的内在结构特征。
TDWR的高分辨率数据虽然可以提供风暴结构的重要信息,但也有一些与数据质量相关的限制,如:窄波束扩大了仰角之间的垂直空白;比WSR-88D更有严格的地杂波抑制可能损失气象信号;5cm波长造成的严重信号衰减等。衰减会导致沿着径向方向损失信号,回波越强,信号损失越大,会因信号损失导致低估降水量。TDWR的杂波抑制算法把48nm范围内所有库都进行滤波(48nm也是多数产品的显示范围),经常出现的沿零速度线方向的信号损失就是由于TDWR的杂波抑制造成的。使用TDWR时应考虑存在衰减、范围、速度去模糊等这些限制。如图4,TDWR不能探测到锋面,而WSR-88D恰好可以作为弥补。
为了应对晴空湍流、晴空风切变等,有的机场还安装有激光雷达LIDAR,如香港大屿山国际机场为了应对春天多发的晴空风切变和湍流,于2002年安装了世界上第一部为机场提供报警服务的激光雷达。
四、机载航空气象雷达
美国的民用机载气象雷达研究目前处于世界领先水平,从70年代到90年代的20多年里,美国科研单位和生产厂商进行了大量的研究和试验,终于将机场地杂波抑制到雷达接收机的线性动态范围内,在强的地杂波背景下成功探测到微下击暴流、低空风切变危险区的存在,并清楚地显示给机组人员。当前国外民用机载气象雷达所采用的探测技术有多普勒技术、双极化技术、红外技术、激光技术、圆极化技术及双频技术等,但采用脉冲多普勒技术的民用机载气象雷达为主要设备。
机载气象雷达的国际标准主要有ARINC公司(Aeronautical Radio, Inc)的708A-3标准,和RTCA公司(Radio Technical Commission for Aeronautics)的DO-220标准。机载气象雷达相关标准对航空电子设备制造商进行规范,引导新设备最大可能朝着标准化的方向前进。这两个标准对机载气象雷达的用途、组成、性能、电子电气接口、测试方法等做出了详细的规定。
机载气象雷达的主要生产商是Rockwell Collins和Honeywell,A380安装Honeywell的RDR-4000,B787安装Collins的WXR-2100。这两个型号的机载气象雷达都是全自动的,它们都可以在所有量程、所有高度、所有时间,在不需要飞行员调整仰角和增益的情况下,自动去除地杂波,简化飞行员的训练要求和工作负荷,增加安全性。自动模式给飞行员提供的是最佳配置、最佳显示,而这在以往只有最有经验的雷达操作员经过反复操作才可能获得。
机载气象雷达可探测低空风切变、高空湍流及雷暴强降水,还可用于地形测绘。地形测绘通过提供飞机前方的地形扩展飞行员的视野,是视景增强系统的重要组成部分。
同一强度的大气状况在不同的地方由于湿度、温度等原因的不同,造成飞机收到的回波强度不一样。如同地基雷达需要本地化配置一样,为了更准确地反映实际天气情况,机载气象雷达也将根据飞机所处地域、季节的不同,自动地适应当时当地的气象特征,对雷达参数进行调整。
五、总结展望
美国为世界上雷达网最完善的国家,却也运营着7个不同的雷达网络,为公共气象服务、空管和国土安全提供气象和飞机监视。因为每个网络专注于一种任务,它们之间有巨大的重叠覆盖。如果把这些网络用一种多任务相控阵雷达(MPAR)取代,可以降低总雷达数三分之一。未来,地基航空气象雷达的趋势是多种雷达趋于统一,机载气象雷达的发展趋势是更加融入空地数据链,充分利用地面强大的探测和处理能力。
参考文献
[1]FAA Mission Need Statement #339[Z]. June 2002.
[2]张培昌,杜秉玉,戴铁丕.《雷达气象学》[M]. 北京:气象出版社. 2001:pp.211.
[3]胡明宝.《天气雷达探测与应用》[M]. 北京:气象出版社. 2007:pp.130.
