面向单体建筑精细化建模的无人机三维航线规划*
2017-06-28周骁腾张书航
周骁腾,周 政,张书航,刘 春
(同济大学 测绘与地理信息学院,上海 200092)
面向单体建筑精细化建模的无人机三维航线规划*
周骁腾,周 政,张书航,刘 春
(同济大学 测绘与地理信息学院,上海 200092)
文章提出了一种面向单体建筑精细化建模的无人机三维航线规划方案。该方案使用测绘无人机与单个相机作为单体建筑三维建模信息获取的平台,基于传统航空摄影测量技术,结合近景摄影测量方法,将无人机飞行摄影航线改进为三维环绕式,提高建筑物侧面特征点的提取精度,有效地解决了快速获取单体建筑三维精细化建模所需要的信息这一问题。
航线规划;三维重建;无人机;单体建筑
0 引言
三维 GIS(Geographic Information System)是当今乃至未来 GIS技术的主要标志性内容之一,它突破了空间信息在二维地图平面中单调表现的束缚,为各行各业以及人们的日常生活提供了更有效的辅助决策支持[1]。对于建筑业和测绘领域,可量测的三维模型至关重要。
无人机遥感技术是目前通过低空获取地表信息的手段之一,它采用无线电遥控设备及地面控制系统进行操控,具有体积小、重量轻、飞行速度缓慢,拍摄范围广等优势[2]。由于这种技术具有快速、安全、经济等特点,已经成为世界各国研究的热点,逐步从开发实验向实际应用方向过渡[3]。测绘无人机是利用先进的无人驾驶技术、传感器技术、遥测遥控技术、通信技术、全球卫星导航技术、定位定姿技术和遥感等技术,快速获取国土、资源、环境、事件等空间遥感信息,并可进行实时处理、建模和分析[4]。
目前,无人机航线规划大多局限于二维环境,而实际应用中需要对复杂目标进行三维建模,所以航线规划需要扩展到三维,即解决三维建模的覆盖问题。计算机视觉及控制领域的研究主要集中于在未知环境下的并行定位与地图构建(SLAM)[5],以及StructfromMotion(SfM)[6],但SLAM技术构建的地图仅为无人机避障导航所用,精度不高且存在一定的信息缺失;而SfM多为研究如何从多张异质高重叠像片构建三维模型,并不关心怎样的航线规划才能满足“高重叠”的要求。也有一些需要对三维覆盖问题进行规划的研究,如历史建筑保护[7]、林业建模[8]等,文献[9]针对三维城市进行覆盖规划研究,但其将三维建筑抽象成包围盒,其结果可能存在遮挡等不完整的情形。目前测绘行业所应用的三维建模方式多为航空倾斜摄影测量,因摄影角度固定,存在不可避免的遮挡,致使获取的建筑物的侧面纹理信息不完整。
获得建筑三维信息的方法主要有近景摄影测量[10]和航空摄影测量[11]。其中近景摄影测量具有精度高的特点,但缺点是耗时长并且无法获得建筑顶面的信息;而航空摄影测量能够较快速地获得大面积建筑三维信息,但缺点是成本高且建筑侧面信息获取不完整。因此,如何全方位快速便捷地获取建筑物的精确信息是三维建模的关键问题,为此本文试图将传统航空摄影测量技术和近景摄影测量技术相结合,采用测量型无人机对建筑进行三维航线环绕数据采集,并快速建立模型。
1 三维航线规划模型
对于一栋复杂异形单体建筑,如何全面获取其信息,需要从多个角度进行观测,对于携带单个相机的无人机来说,一般包括3个方面:侧面与顶面航线规划、面与面衔接处的航线规划、底边优化的航线规划。其整个航线环绕方式如图1所示。
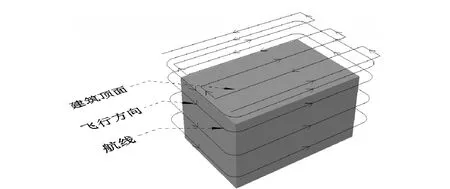
图1 三维航线规划示意图Fig.1 Diagram of 3D route planning
1.1 建筑物侧面与顶面像片拍摄的航线规划
若将每一个面都作为航空摄影测量的物方对象来看,可以利用航空摄影测量的航线规划,该航线需要满足一定的重叠度要求。同一条航线内相邻像片之间的影像重叠称为航向重叠,重叠部分与整个像幅长的百分比称为重叠度,一般要求在60%以上。两相邻航带像片之间也需要有一定的影像重叠,这种重叠影像部分称为旁向重叠度,旁向重叠度要求30%左右。航向重叠度和旁向重叠度示意图,见图2 。其计算公式为:
(1)
(2)
式中:lx,ly表示像幅的边长;px,py表示航向和旁向重叠影像部分的边长[12];Px%,Py%表示航向重叠度和旁向重叠度。
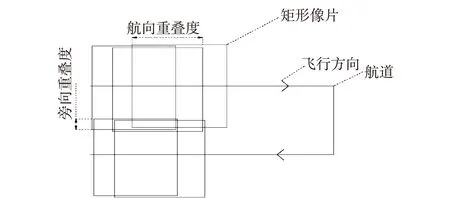
图2 航向重叠度与旁向重叠度Fig.2 Forward overlap and side overlap
如图3所示,拍照间隔和航道间隔可以由重叠度、距拍摄面距离以及相机检校后已知的数据经过简单的几何推算得到:
(3)
式中:D表示拍照间隔或航道间隔;d表示距拍摄面距离:P%表示重叠度;fov表示相机视场角。拍照间隔取的fov值为相机垂直视场角,航道间隔取的fov值为水平视场角。
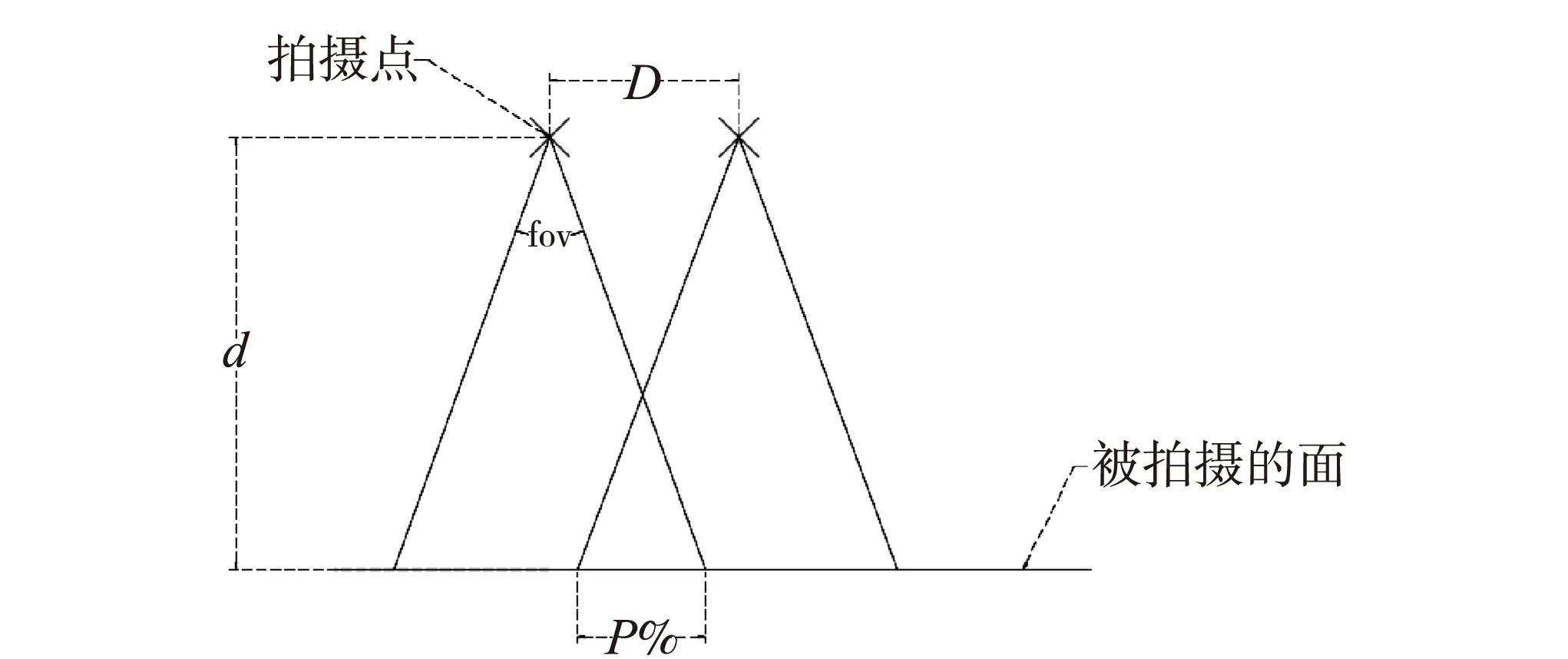
图3 拍照间隔与航道间隔计算示意图Fig.3 Calculation diagram of both capture intervals and adjacent route intervals
1.2 建筑物面与面衔接处像片拍摄的航线规划
对于单体建筑,存在面与面衔接处像片重叠的问题。无人机在拍摄单个面的过程中所有像片都是近似正射的,如若每个面都正射,面的边缘处的点可能会只出现在单张或两张像片上,导致边缘处无法进行准确的立体前方交会,出现边缘空洞或面与面无法正确拼接。因此,需要对边缘处增拍像片。
如图4所示,在面与面衔接处加拍两张像片,使夹角处的像片与同航道上转弯前后的两张像片以及相邻上下两条航道的像片满足四度以上的重叠。该方案可以使用在侧面与侧面衔接处以及侧面与顶面衔接处。
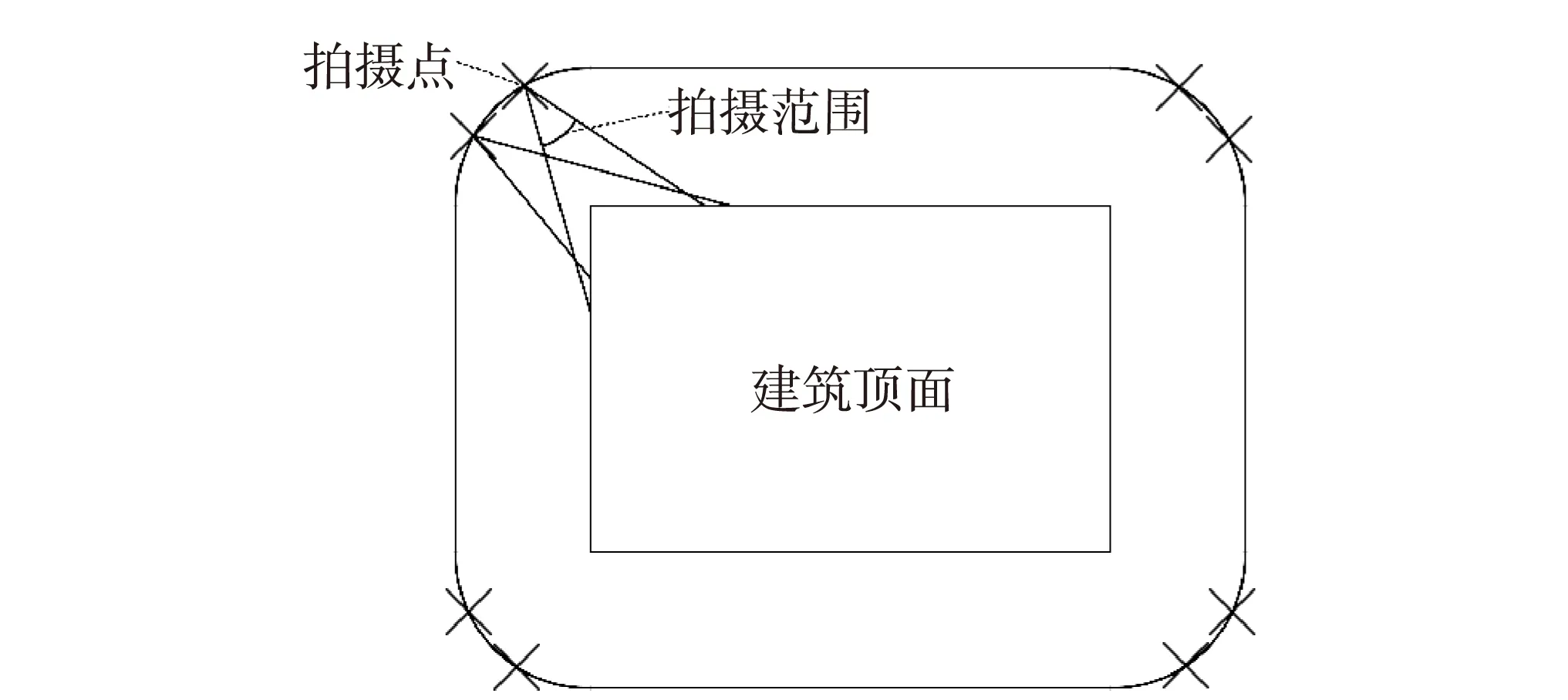
图4 建筑物面与面衔接处像片拍摄方案Fig.4 The imaging scheme for joint of two connected exteral surfaces on a building
1.3 建筑物靠近底边部分像片拍摄优化的航线规划
由于无人机飞行时存在安全高度,所以第一条航线上的正射影像可能会无法拍摄到建筑物靠近地面的部分,会导致信息丢失。对于这种情况,本文提出如下解决方案,依靠云台的俯视拍摄,以满足像片旁向重叠度大于30%,具体方案可分两种情况进行讨论。
1.3.1 安全高度大于建筑物高度
如图5所示,此时第一张像片的云台角度a0可以根据建筑物高度h1和安全高度h2及距拍摄面距离d计算公式为:
(4)
此时如果在建筑物面是以安全高度位置的点为原点,以竖直向下为正方向建立一维坐标系,即可得到此时相机所能拍摄到在此坐标系上的最上方点坐标y1及最下方点坐标y2:
(5)
(6)
Δy=y2-y1
(7)
式中:fov为相机垂直视场角;Δy为坐标差。
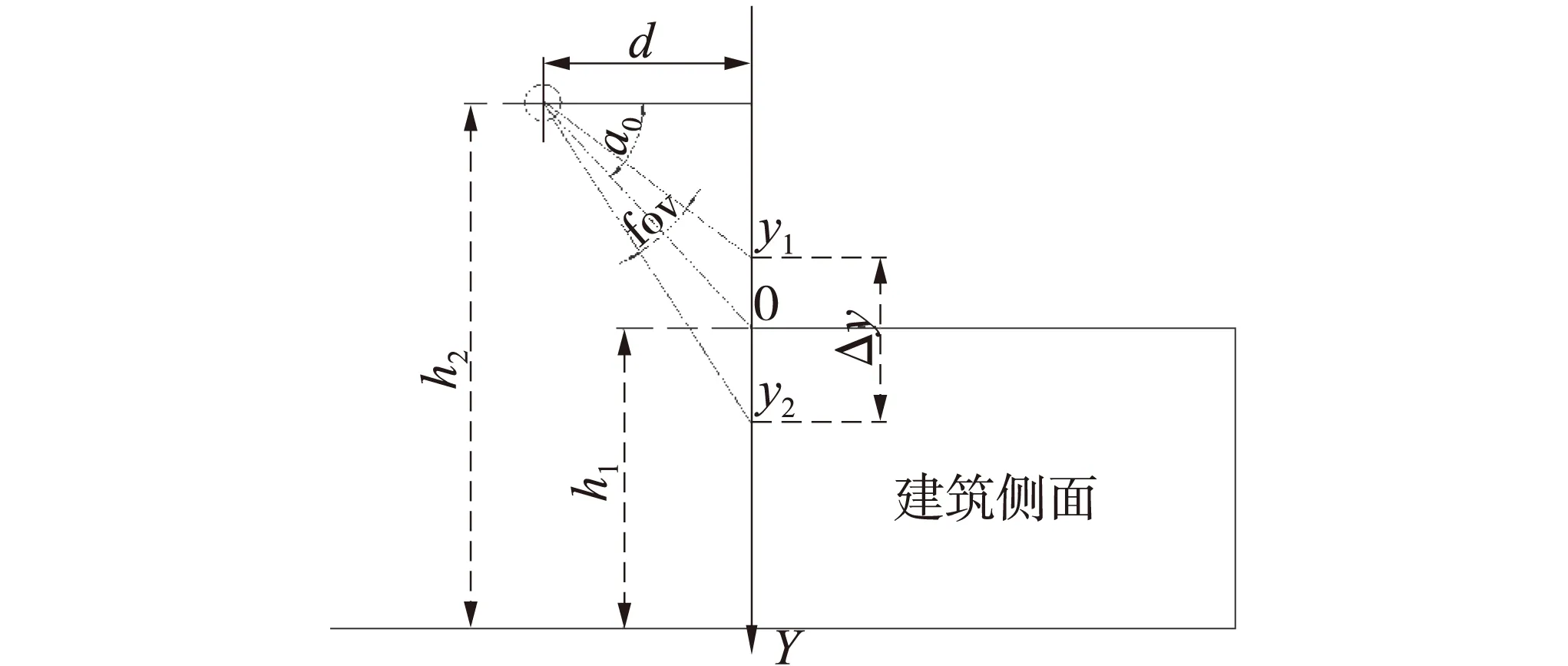
图5 第一张像片拍摄范围Fig.5 Coverage of the first photo
根据重叠度overlap,下一张相片必须与此相片保持一定的重叠(见图6),在此坐标系中要求长度满足重叠,因此下一张像片的最上方点坐标y1′可计算出。为避免出现无摄影基线以获取更佳的信息,将相机向上移动2 m,记录上升的次数n,此时最下方点坐标y2′与云台方向角a1即可通过与y1′之间的关系计算得到:
y1′=y2-Δy·overlap
(8)
(9)
(10)
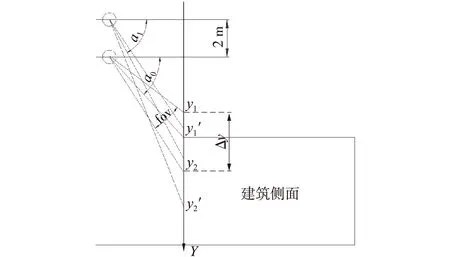
图6 循环向下拍摄下一张像片Fig.6 Circulating down to shoot the next photo
如果y2′小于安全高度值h2,将得到的y1′与y2′代入式(7),进行式(7)-(10)的循环至y2′大于h2,记录每次得到的云台角度a1和上升的次数n,即可得到拍摄至地面所有云台角度a和此时对应的拍摄高度。
1.3.2 安全高度小于等于建筑物高度
如图7所示,此时第一张像片的云台角度定为0度,即对此建筑物侧面进行垂直摄影。同样按照上述方法建立一维坐标系,可以得到此时的最上方点坐标y1及最下方点坐标y2:
(11)
(12)
Δy=y2-y2
(13)
此时同样每次拍摄上升2m来避免出现无基线摄影,记录上升次数为n,计算下一个拍摄点的高度及云台角度:
y1′=y2-Δy·overlap
(14)
(15)
(16)
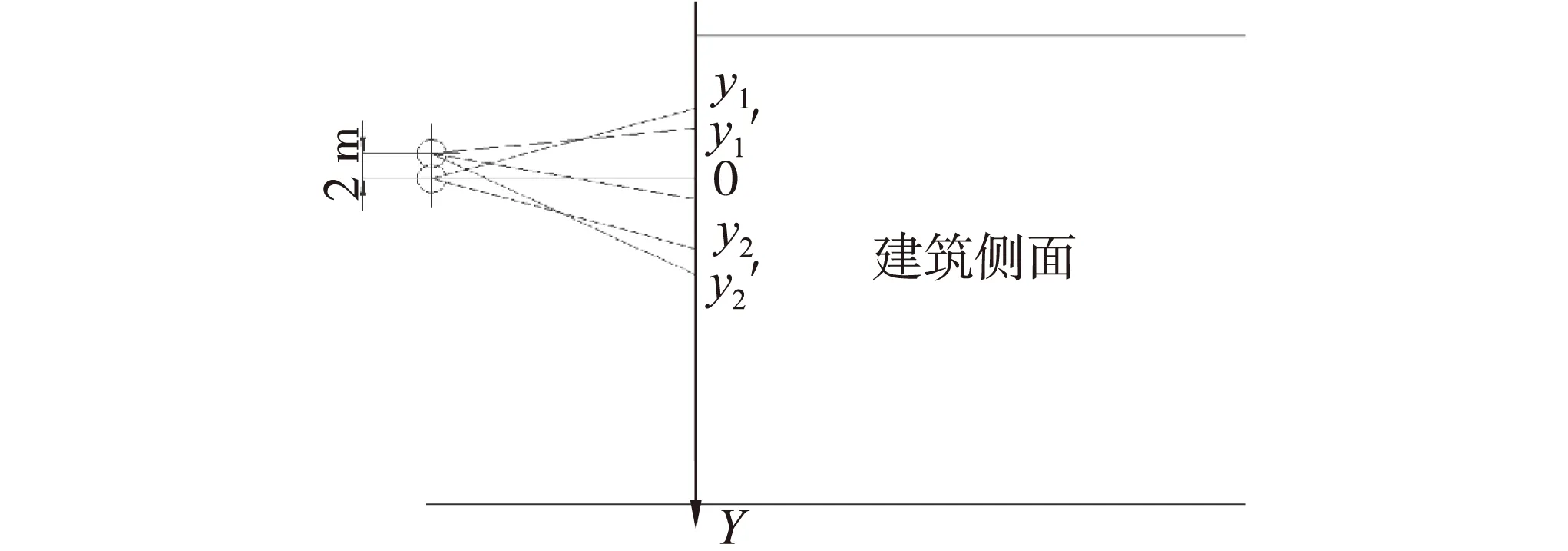
图7 像片上方点在水平拍摄线以上Fig.7 Top of the photo being above the horizontal shooting line
通过式(14)-(16)进行循环计算,直到式(14)中得到的y1′值大于-2n-2(下一次拍摄的航高在坐标系中的坐标值),此时可以等价于安全高度大于建筑物高度,如图8所示,记录此时的y1′及n用于后续计算,同时记录之前过程中的云台角度a与此角度对应的拍摄高度。
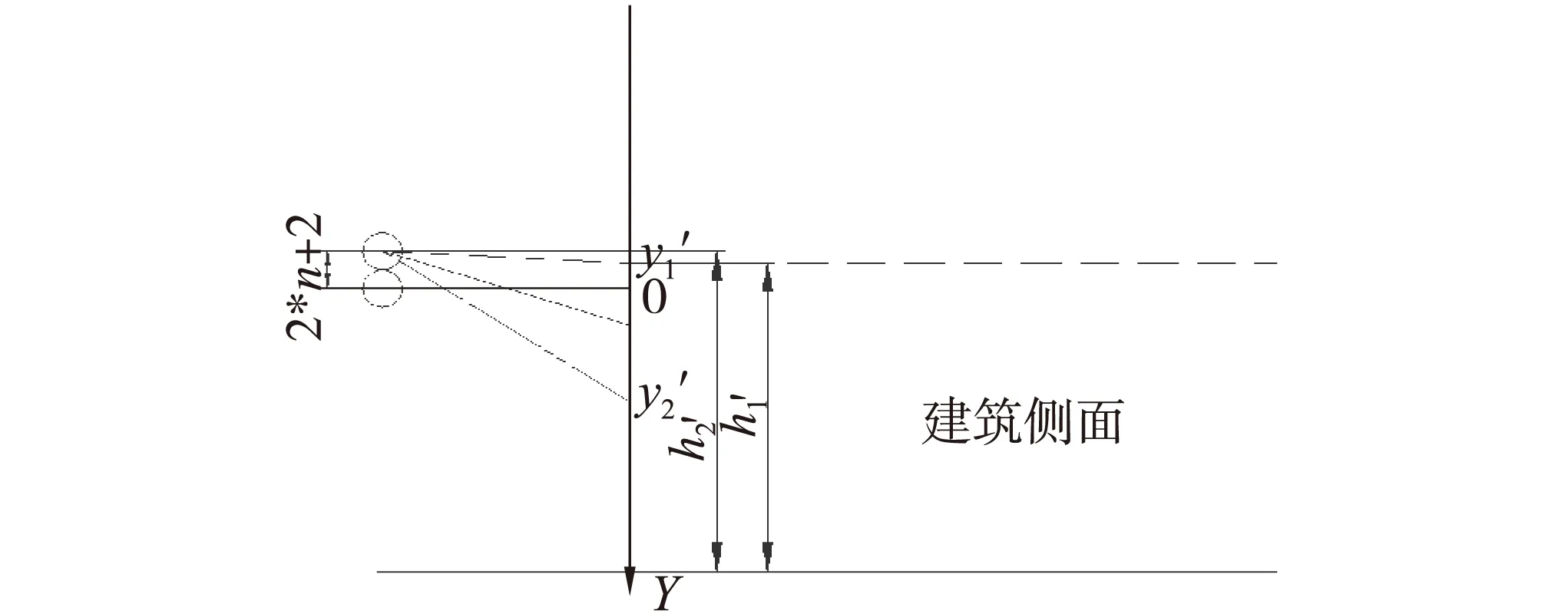
图8 后半部分拍摄起始点Fig.8 Starting point of the next part of shooting
h1′=h2-y1′
(17)
h2′=h2+2×n+2
(18)
此时后半段拍摄可以等价于安全高度大于建筑物高度,以此时的云台高度重新建立一维坐标系,等价建筑物高度h1′和安全高度h2′通过式(17)和式(18)获得,按安全高度大于建筑物高度的方法进行计算,并全部记录过程中的云台角度a和高度,与前半段记录结合即为所需的所有角度和拍摄高度。
将以上3种情况综合考虑,并对每圈航线高度进行排序,最后形成每圈航线上升的立体环绕航线。
2 实验分析
2.1 实验平台
实验使用的无人机是自行组装的六旋翼无人机(如图9所示),采用开源飞控PIXHAWK,GPS选用M8N,相机采用经检校的SonyILCE-6000,配备35 mm镜头,其水平视场角为36°,垂直视场角为27°。

图9 六旋翼无人机Fig.9 Six-rotor UAV
根据上述算法设计了自动三维航线规划程序,可以勾勒出建筑轮廓并输入相应参数,程序自动生成飞行计划。具体工作流程,如图10所示。航线规划程序对于规则建筑可以进行较为精确的航线规划。
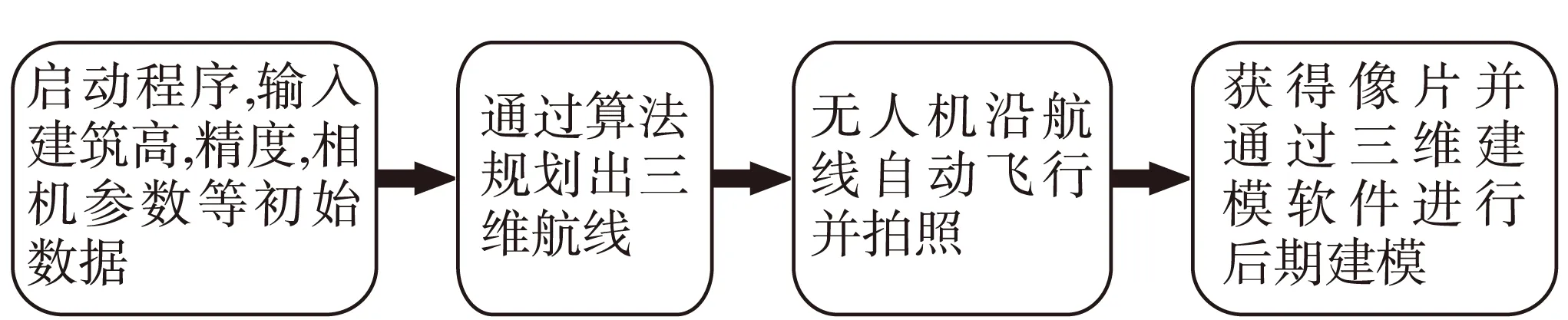
图10 实验工作流程Fig.10 Flowchart of experiment
2.2 建模结果
实验对象为某变电站,无人机安全飞行高度设为40 m,飞行速度5 m/s,相机焦距设定为35 mm,共拍摄像片167张。
利用三维建模软件,匹配各张像片的同名点,构建三维模型,最终的效果如图11所示。
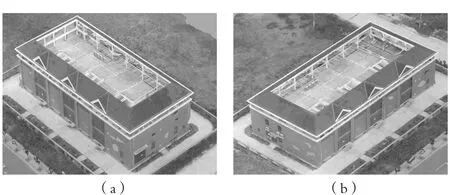
图11 建模效果Fig.11 Modeling effects
3 精度分析
为检验建模精度,对该建筑进行了实地测量,采用拓普康ES-100全站仪,共测量了该建筑物上30个特征点,随机选取了20组数据计算点与点之间距离,与建模软件模型量测结果进行对比,对比结果,如图12与表1所示。
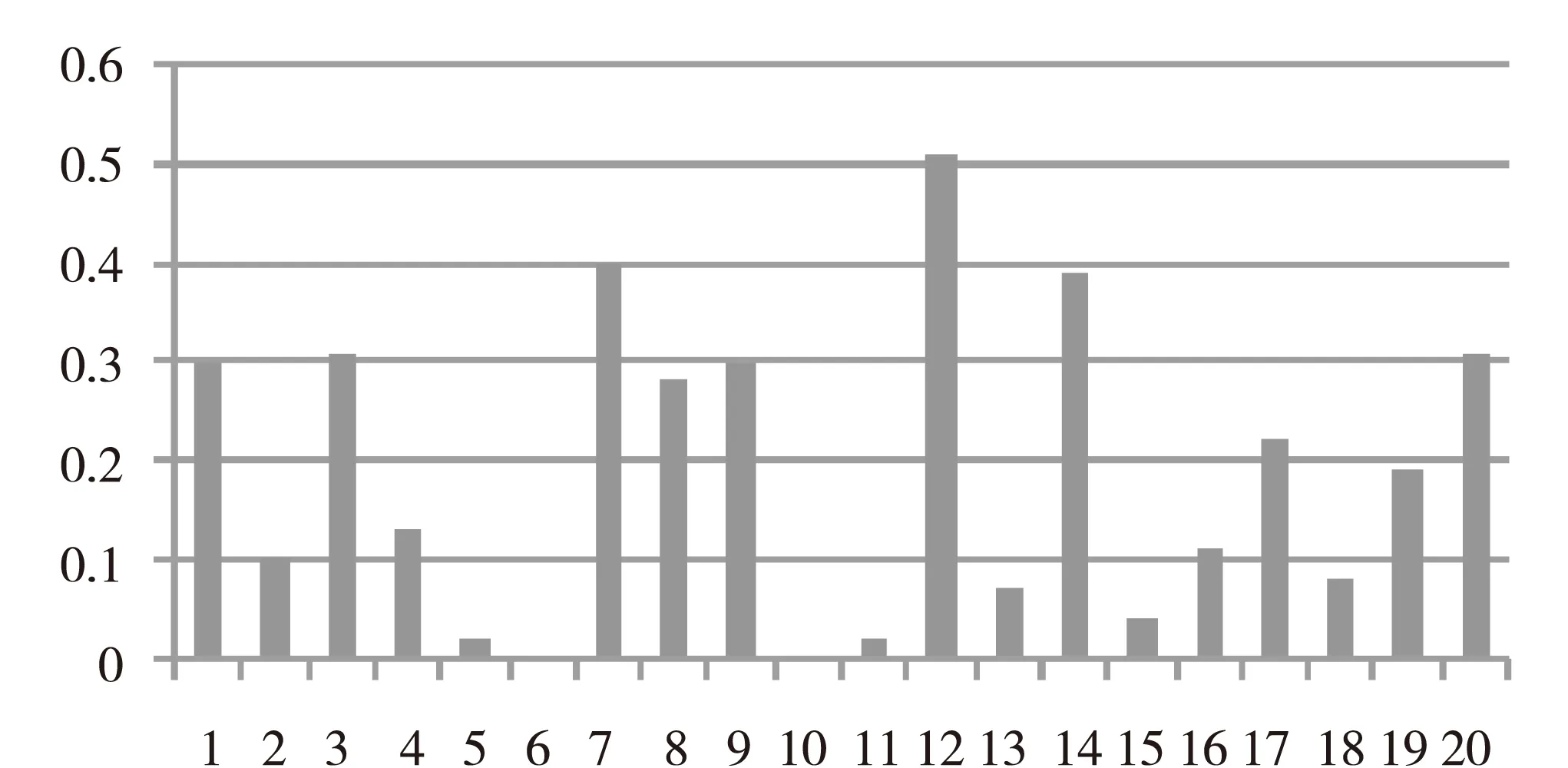
图12 实地测量距离与模型量测距离差值Fig.12 Differences between field and model measurement distances注:图12中,纵坐标代表实地测量距离与模型量测距离差值,单位为m。

最大差值/m最小差值/m平均差值/m差值中误差/m绝对值0.5100.190.17
从图12和表1中可以看出,建筑模型长度误差为19 cm左右,最大误差为51 cm,最小误差为0 cm,中误差为17 cm,可满足单体建筑精细化建模的要求。
4 结束语
本文提出了一种面向单体建筑精细化建模的无人机三维航线规划方案,经过实验检验该方案切实可行。实验通过程序自动规划无人机三维航线,获取了单体建筑的三维信息,并最终构建可量测的三维模型。
该方案可为传统建筑三维重建方法存在成本高、效率低等缺陷提供了一种有效的解决办法,提高了建筑三维重建的效率,降低了成本,且操作简单方便,非专业人员也可以借助它快速获得单体建筑的三维模型。该方案还可以应用于建筑物竣工后的三维建模、建筑物的形变监测、三维地图的制作以及古建筑物的三维资料保存等方面,具有较好的应用前景。
[1] 朱庆.三维GIS及其在智慧城市中的应用[J].地球信息科学学报,2014,16(2):151-157.
[2] Herwitz S R,Johnson L F,Dunagan S E,et al.Imaging from an unmanned aerial vehicle:agricultural surveillance and decision support[J].Computers & Electronics in Agriculture,2004,44(1):49-61.
[3] Michael A.The integration of UAVs in airspace [J].Air & Space Europe,2000,2(1):101.
[4] Watts A C,Ambrosia V G,Hinkley E A.Unmanned Aircraft Systems in Remote Sensing and Scientific Research:Classification and Considerations of Use[J].Remote Sensing,2012,4(6):1 671-1 692.
[5] Lienard J,Vogs A,Gatziolis D,et al.Embedded,real-time UAV control for improved,image-based 3D scene reconstruction[J].MEASUREMENT,2016,81:264-269.
[6] Westoby M J,Brasington J,Glasser N F,et al.';Structure-from-Motion';photogrammetry:A low-cost,effective tool for geoscience applications[J].Geomorphology,2012,179:300-314.
[7] Alsadik B,Gerke M,Vosselman G.Automated camera network design for 3D modeling of cultural heritage objects[J].Journal of Cultural Heritage,2013,14(6):515-526.
[8] Gatziolis D,Lienard J F,Vogs A,et al.3D Tree Dimensionality Assessment Using Photogrammetry and Small Unmanned Aerial Vehicles.[J].Plos One,2015,10(9):e0137765.
[9] Cheng P,Keller J,Kumar V.Time-optimal UAV trajectory planning for 3D urban structure coverage[C]// Ieee/rsj International Conference on Intelligent Robots and Systems.IEEE,2008:2 750-2 757.
[10] 冯文灏.近景摄影测量的基本技术提要[J].测绘科学,2000,25(4):26-30.
[11] 李学友.IMU/DGPS辅助航空摄影测量综述[J].测绘科学,2005,30(5):110-113.
[12] 张剑清,潘励,王树根.摄影测量学[M].2版.武汉:武汉大学出版社,2009:19.
3D Route Planning of UAV for Fine Single Building Modeling
ZHOU Xiao-teng,ZHOU Zheng,ZHANG Shu-hang,LIU Chun
(CollegeofSurveyingandGeo-Informatics,TongjiUniversity,Shanghai200092,China)
This paper presents a solution to make 3D route planning of UAV for fine single building modeling.This solution utilizes UAV with a surveying camera as the platforms for getting 3D modeling information of a single building.Based on traditional aerial photogrammetry technology and close-range photogrammetry,the solution improves the route to a 3D form,which makes UAV fly around a single building.Therefore,the accuracy of the building model is improved and the 3D modeling information is acquired quickly.
route planning;3D reconstruction;UAV(Unmanned Aerial Vehicle);single building
2017-01-23
P 231
A
1007-9394(2017)02-0024-04
周骁腾(1996~),男,江苏南通人,本科,研究方向:地理信息系统。