平面六边形运动学优化设计与分析
2017-06-27王炜堃江录春高大伟
王炜堃,江录春,高大伟
(北京交通大学机械与电子控制工程学院,北京 100044)
平面六边形运动学优化设计与分析
王炜堃,江录春,高大伟
(北京交通大学机械与电子控制工程学院,北京 100044)
基于平面六边形的分析,提出了平面六边形静运动学优化分析。首先我们从静力学入手,采用穷举法对六边形的步态进行初步分析,并且给出了优化的三个指标,分别为节能性、速度性和稳定性,通过这三个方面,对平面六边形的步态优劣进行分析。从静运动学考虑到动力学的分析,根据实时zmp判断其是否存在翻倒步态。通过三个方面的综合考量得出最终优化后的步态,再考虑其可行性。
平面六边形机构;静运动学;优化指标;滚动机构
六边形相对于四边形,离近似圆形的状态接近,所以不必和四边形机构一样只能依靠滚动模式向前运动,六边形通过角度的变化,可以实现滚动与类履带式稳定运动的结合。本文主要深入剖析-六边形的运动模式,并给出足够的数据分析。我们通过运动学正解与反解给出六边形一定的几何规律,并以此作为基础,对各个指标进行准确的计算,从理想假定的优化情况对所举列出的所有步态进行综合考量,得出近似的符合条件的运动模式。再通过计算更加精确地得出每一步所需角度变化,最后通过数据反推计算和仿真模拟确定方案的正确性。
1 六边形的静运动学分析
1.1 运动学正解
静运动学的正解主要是基于质心和各个角度的关系,通过向量的求解,在给出任意角度时给出其质心的位置。
对于任意的六边形,存在限制方程,即x、y方向上的向量和为零,故给出三个角度即可准确确定其质心的位置。

2 六边形的动力学分析
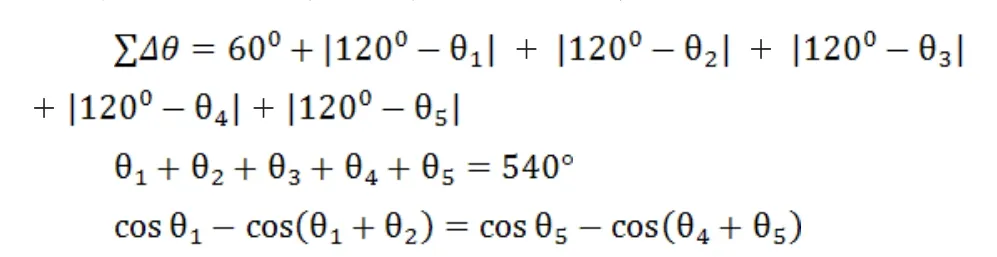
2.1 拉格朗日函数求解驱动力矩的确定
在得到最优步态后,需要求解出最优步态下对应的驱动力矩来实现目标运动。
首先求解出各杆件的角速度。
由矢量方程:

我们得到:

求解出各杆件的角速度后利用拉格朗日方程求解驱动力矩:

各杆件具有相对地面运动的动能与各构件之间相对转动的动能。所以整个系统的动能可以写出为:

公式中各数据均可由解析法分析六杆机构得出。
描述整个构件的势能时,选取杆1所在的平面(即水平面)为零势能面,则势能函数为:

将动能函数(3)与势能函数(4)代入拉格朗日函数(1)后可求得:
可见为了实现相应的运动步态我们能求出对应的驱动力矩,证明了运动步态的可实现性。
2.2 ZMP点的求解
ZMP准则可以判断机构的稳定性,对于平面六连杆机构,可采用ZMP准则判定其是否翻倒,ZMP的计算公式为:

当ZMP点在机构支撑范围内,机构不会发生倾倒;ZMP点在机构支撑范围外,机构将发生倾倒。
3 基于速度、能量、平稳性指标下的优化
3.1 节能性步态优化
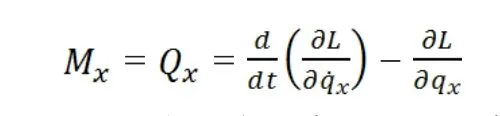
在穷举法的判定中,我们得出六边形转变为五边形最优的步态为如下:
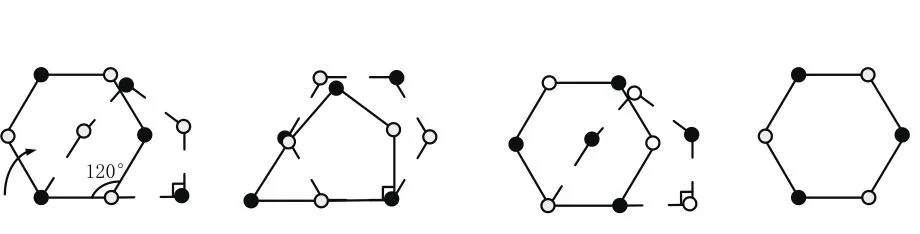
在此优化条件下,可以根据静运动学中关于质心的正解,以每个角度运动速度为匀速过程,给出运动过程中微量变化后质心的图像,如下图1所示。
由图像可以得出质心的变化范围在0.866l~0.94l之间,较为稳定。
3.2 稳定性步态优化
稳定最优,我们给定的判断条件是,质心在y方向上的变化量△y 为最小时,判定其稳定性最优,机构在运动中与地面的冲击力越小,稳定性能越好。

图1
我们将运动模型进行理想化分析,假定在一个步态的运动过程中,质心y的值始终保持在同一直线上。以x=0.5l;y=0.866l,即正六边形为起始状态,采用静运动学中关于质心的反解,得出各个角度的对应值。所得如图2所示。

图2
初步带入数值进行验证,xc=0.5l时各个角度相交于120°,判定曲线大致正确,再运用曲线的拟合得出每个角度的变化情况。
4 结语
(2)基于给定的指标,给定了对应的最优步态,并通过动力学的计算验证了运动的可实现性,通过模拟仿真验证步态的正确性。
(3)六杆机构应用领域广泛,研究出的步态具有可实现性。同时平面运动步态的研究为相应的空间运动步态研究打下基础。
[1]刘长焕,2012 - 北京交通大学:机械设计及理论:80-95.
[2]翟美丽,2014-北京交通大学:单闭链6R连杆滚动机构的研究. [3]Chen Y.Design of Structural Mechanism[D].Oxford:St Hugh’s College,2003.
[4]HALME A,SCHONBERG T,WANG Y. Motion controlof a spherical mobile robot[C]// International Workshopon Advanced Motion Control,1996:259-264.
[5]HAMLIN G J,SANDERSON A C. A novel concentricmultilink spherical joint with parallel roboticsapplications[C]// Proceedings of the IEEE International Conference on Robotics and Automation ,1994 :1267-1272.
[6]LEEWH ,SANDERSON A C. Dynamic rolling locomotion and control of modular robots[J]. IEEE Transactions on Robotics and Automation,2002,18:32-41.
[7]SEBENS C,TRUSZKOWSKI W. An agent-based tetrahedral walker[C]// Proceedings of 2006 AerospaceConference,2006,7-13.
[8]张利格,毕树生,彭朝琴. 空间四面体翻滚机器人运动学分析及仿真实验[J]. 北京航空航天大学学报,2011,37(4):415-420.
[9]荀致远,关永瀚,席利贺,孙春华,姚燕安.空间三正交平行四边形滚动机构[J].机械工程学报, 2015,17期.
TH112
A
1671-0711(2017)06(下)-0078-03