用于改善帕金森病冻结步态的可穿戴技术
2017-06-22沈林勇胡小吾
丁 航,沈林勇,吴 曦,胡小吾
(1.上海大学机电工程与自动化学院,上海 200072;2.长海医院,上海 200433)
用于改善帕金森病冻结步态的可穿戴技术
丁 航1,沈林勇1,吴 曦2*,胡小吾2
(1.上海大学机电工程与自动化学院,上海 200072;2.长海医院,上海 200433)
冻结步态是帕金森病中一种常见的步态障碍症状,表现为患者在行走过程中的短暂停滞或起步困难等,严重影响患者的生活质量。提出一种基于引导光线提示的用于改善帕金森病冻结步态的可穿戴技术,该技术通过在患者脚前方产生一条标志光线引导患者行走,同时利用惯性传感器采集患者行走时的加速度数据,并采用冻结指数和曼-惠特尼U检验等方法分析研究引导光线提示对冻结步态的改善作用。结果表明,在0.01的显著性水平下,引导光线提示能够显著改善冻结步态。
冻结步态;引导光线;可穿戴;冻结指数;曼-惠特尼U检验
帕金森病是一种常见于中老年的神经系统变性疾病,临床上以静止性震颤、运动迟缓、肌强直和姿势步态障碍为主要特征[1]。其中,冻结步态是发生于帕金森病中晚期的一种典型的步态运动障碍症状,其主要的临床表现为患者在行走时出现瞬变性的短暂停滞或起步困难等,患者感觉自己脚像“粘”在地面上无法迈步,同时伴有双腿的抖动,整个过程持续几秒钟到几分钟不等。由于冻结步态是一种突发性、瞬变性的运动异常,其极易造成患者在行走时的突然摔倒,严重影响患者身体健康和生活质量[2-3]。
临床发现,具有冻结步态的患者虽然在平地上难以行走,但是能够正常的上下楼梯。此外,若患者行走时其脚前方出现提示性光标,根据患者反映前方会有障碍物的感觉,想要去跨过它,能够很好的改善冻结步态的症状[4-6]。临床医生猜想,引导光线提示改善帕金森患者行走功能的可能机理在于外部的视觉提示对患者的视神经有一定的刺激作用,从而激活患者控制肢体运动生物电信号的传递通道。
同时,目前临床上对冻结步态评估诊断普遍采用的是临床医生评分量表评分的方式,具有较大的主观性。随着MEMS传感器的发展和可穿戴设备的兴起,惯性传感器对患者运动数据的采集为冻结步态的定量分析提供了新的解决方案[7-12]。瑞士的SinzianaMazilu等人设计出NTMotion可穿戴传感器穿戴于患者小腿、大腿和腰背处,并结合智能手机实现冻结步态的在线检测[13]。希腊的Tripoliti等人利用6个加速度计和2个陀螺仪测量患者腰部、胸部、腕部和小腿处的运动数据,并利用随机森林分类方法建立冻结步态分类器[14]。德国的Niazmand K等人研发出一套智能衣服MiMed-Pants,衣服中集成有加速度计用于测量患者的运动数据并检测评估冻结步态[15]。这些设备和技术目前仍处于临床实验阶段,且并没有将惯性传感器数据应用于冻结步态改善和步态训练效果分析中。
基于以上的临床依据和技术背景,本文提出一种用于改善帕金森患者冻结步态的可穿戴技术,通过该技术实现在患者行走过程中产生一条标志光线引导患者跨步,同时利用惯性传感器采集记录患者小腿处的加速度数据,并分析在引导光线提示下患者步态改善情况。
1 总体方案
基于引导光线提示的可穿戴技术,包括左右侧两个引导训练及数据采集设备,穿戴于患者脚踝附近,每个设备由其结构本体和本体内的控制系统组成,控制系统无线通讯连接一个上位信息处理单元,如智能手机等。
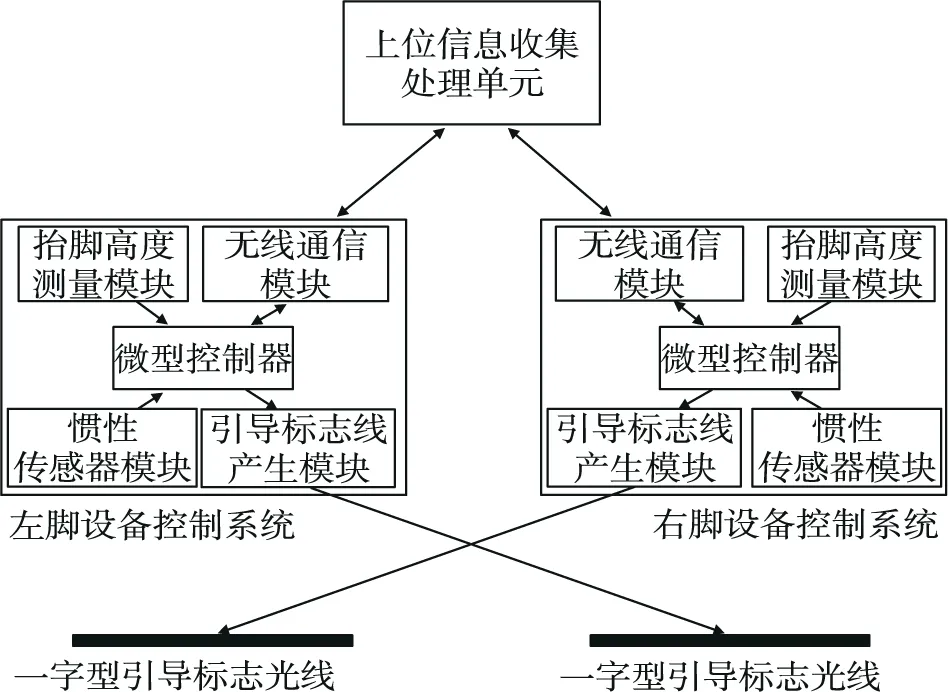
图1 设备整体功能框架图
如图1所示,设备控制系统中包括微型控制器(MCU)、抬脚高度测量模块、无线通信模块、惯性传感器模块以及引导标志线产生模块。其中,抬脚高度测量模块用于测量患者穿戴设备时设备距离地面的高度,从而判断患者是否抬脚;惯性传感器模块用来采集患者行走时小腿处的加速度等信息;引导标志线产生模块用来实现帕金森患者在跨步行走时脚前方助步引导标志光线的产生;无线通信模块用于MCU和智能手机之间的指令通信和数据传输。
冻结步态患者穿戴好设备后,抬脚高度模块采集高度数据以判断患者是否抬脚,当患者一只脚落地时,位于另一只脚上的设备在该脚前方产生引导标志光线,而当脚抬起时,引导光线熄灭。同时,设备中的惯性传感器模块实时采集患者小腿处的加速度数据,并通过无线通信模块传输到智能手机中,智能手机实时记录患者相关的运动数据用于后续的分析验证。
2 系统设计
2.1 硬件电路
该设备的硬件结构主要由电源电路、引导光线产生电路和运动数据采集传输电路组成。设备的主电路板图如图2(a)所示,其中抬脚高度测量模块采用US-100超声测距传感器,可实现2.0 cm~4.5 m的非接触测距;惯性传感器采用高精度导航模块JY-901,模块采用动力学解算和卡尔曼滤波算法,能够精确快速的输出当前模块的加速度信息,量程为±16gn,分辨率可达6.1×10-5gn。图2(b)为完整的可穿戴设备,图2(c)为冻结步态患者穿戴设备进行步态训练。
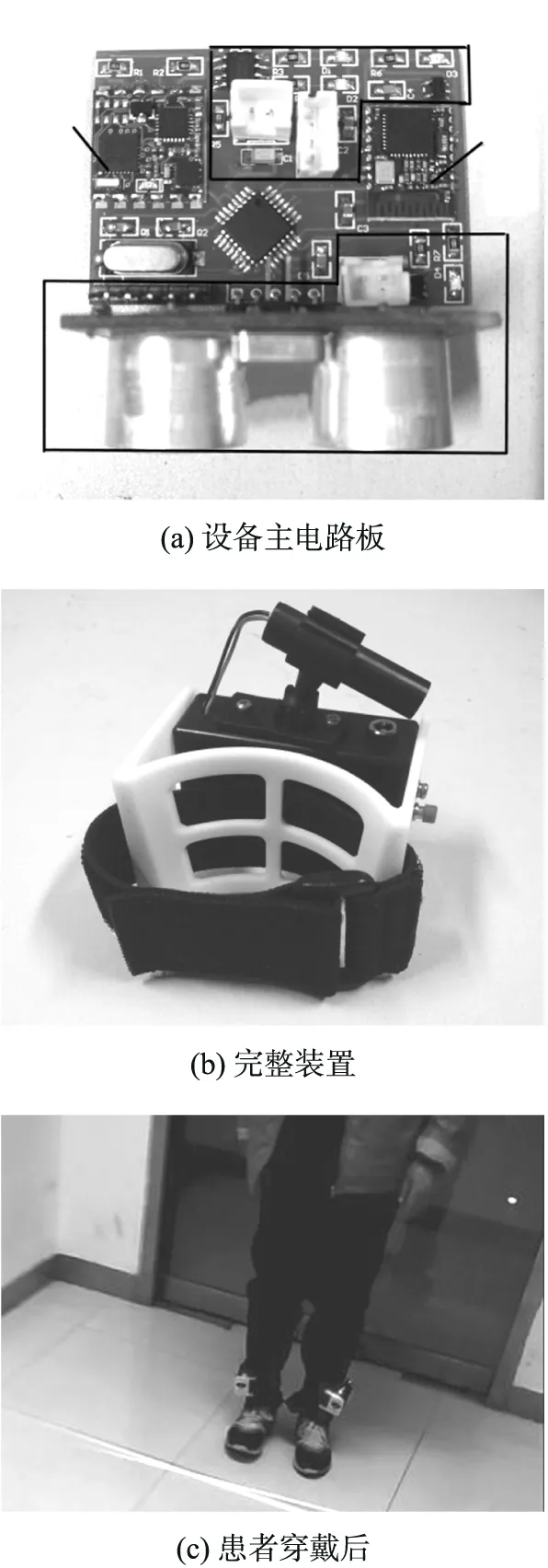
图2 改善冻结步态的可穿戴设备
装置采用嵌入式技术用于采集传输患者运动数据、接收手机控制指令、控制引导光线的开关等。MCU与惯性传感器之间以I2C协议进行数据采集,MCU与智能手机之间的无线通信是通过蓝牙4.0 BLE模块。蓝牙4.0模块传输距离可达80 m,MCU直接通过串口将数据发送到蓝牙4.0模块,在模块与手机建立蓝牙连接后将数据传送到智能手机中。
2.2 下位机软件程序
可穿戴设备下位机主要实现的功能有:①利用Echo和Trig两个I/O口采集超声传感器的抬脚高度数据;②利用I2C通信功能采集惯性传感器的运动数据;③设置患者行走之前的初始高度数据;④接收判断手机端的操作指令,实现引导光线的开关控制;⑤当数据传输开启后利用串口将数据发送到蓝牙4.0模块。下位机软件程序的流程图如图3所示。

图4 手机采集控制软件
2.3 手机采集控制软件app
手机采集控制软件采用Eclipse平台和Java语言进行开发,通过Android蓝牙服务与可穿戴设备建立蓝牙连接,传输控制指令实现引导光线开关控制和运动数据接收控制。当启动运动数据接收功能时,app自动读取下位机传输的患者运动数据并记录到手机SD卡中,用于后期的冻结步态分析和研究。如图4所示为手机采集控制软件界面图,软件以ListView列表的形式显示出所有可用的可穿戴设备并显示相应的设备名称,同时设置蓝牙连接开关、引导光线开关、数据接收开关等实现对设备的控制操作,在接收患者运动数据的同时会将数据实时显示到软件界面上。
3 数据处理
对具有冻结步态的帕金森患者步态数据的处理流程共分为5个阶段:①信号提取;②信号修正;③信号预处理;④特征提取;⑤显著性差异分析,如图5所示。
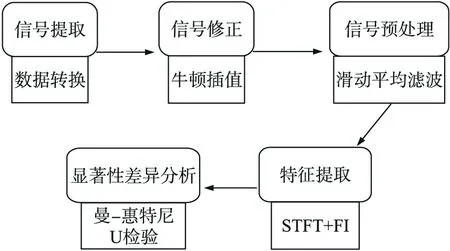
图5 数据处理流程图
3.1 信号修正
在记录开始前,每个设备单元都需要与手机建立蓝牙连接,但由于设备周围信号干扰导致的信号衰减、连接时不稳定性以及传输时间和记录耗时的不确定性造成SD卡中记录的原始数据存在一定的丢失。由于丢失数据量不超过5%且丢失数据的时间间隔在0.2 s以内,故可以考虑使用牛顿插值的方法对加速度信号数据进行修正。
牛顿插值属于多项式插值方法的一种,其通过求各阶差商,每增加一个节点就在原有基础上增加一项以各阶差商为系数的修正项进行插值计算。相比拉格朗日插值,牛顿插值具有承袭性,当增加一个节点时无需重新计算所有的基函数,只需增加一项修正项即可进行插值,计算量更小。其插值多项式如下:
Nn(x)=f(x0)+f[x0,x1](x-x0)+…+f[x0,x1,…,xn](x-x0)(x-x1)…(x-xn 1)
(1)
式中,n为已知节点数。
为避免插值过程中出现的龙格现象,实际信号修正中n取6,且为保证数据特征的连续性和有效性,一般以丢失点为中心的上下各3点作为已知节点进行插值。
3.2 特征提取
帕金森患者冻结步态的特征提取是数据处理流程的关键。如图6所示为出现冻结步态的帕金森患者和健康对象在8 m长的走廊行走时垂直于左脚处的加速度数据对比图。由图6可知,健康对象在3 Hz附近存在较大的振幅峰值,而冻结步态患者除了在3 Hz附近存在振幅峰值,且5 Hz~10 Hz之间也存在较大的峰值振幅。正常人的步态行走时的加速度频率通常为0.5 Hz~3 Hz,而具有冻结步态的帕金森患者由于症状发生时其单脚和双脚会出现高频无规律的抖动现象,所以其加速度数据中会有高频成分存在。因此,Steve T.Moore等人将0.5 Hz~3 Hz定义为运动频率带,代表正常的行走运动;而3 Hz~8 Hz定义为冻结频率带,代表冻结步态发生[16]。

图6 冻结步态患者和健康对象加速度时域和频域对比图
由于冻结步态是一种突发性瞬时性的运动症状,其冻结持续时间几秒钟到几分钟不等,如果仅使用DFT对所采集的加速度信号进行分析,只能反映冻结步态的整体情况,而忽略了其时间特性,并且代表冻结步态的高频成分也会被0.5 Hz~5.0 Hz运动频率带的能量所覆盖。为此,既往文献中提出一种基于短时傅里叶变换(STFT)的反映冻结步态严重程度变化情况的特征值—冻结指数(FI),其定义为将冻结频率带中的能量与运动频率带中的能量之比:
(2)
式中:X(t,f)为加速度信号x(t)的短时傅里叶变换(STFT):

(3)
通过选取合适的滑动窗口(实验中,t=2 s),利用STFT在时频域下求取冻结指数可以反映患者冻结步态严重程度在整个时间段中的变化情况。当冻结指数越大时说明患者冻结步态越严重。当患者冻结步态发生时,冻结指数在该时间段上会出现一个峰值,并且可以选取合适的阈值以判定冻结步态的发生。
为了准确反映出受试者使用可穿戴设备进行步态训练时冻结步态的严重程度的整体变化情况,取最大的冻结指数值(maxFI)和平均冻结指数值(avrFI)作为特征值,并在之后的数据处理中对比引导光线开关训练前后的两个特征值,以验证该设备对帕金森患者冻结步态是否有显著改善。
3.3 显著性差异分析
为分析基于引导光线提示的可穿戴设备对具有冻结步态的帕金森患者是否具有显著改善,对所提取的两个特征值(maxFI和avrFI)进行显著性差异分析。目前,常用的显著性分析方法有T检验、U检验、卡方检验等参数检验方法和曼-惠特尼U检验、K-S检验、游程检验等非参数检验方法。由于参数检验的前提是总体分布已知并服从正态分布,而冻结步态是一种瞬时性、突变性的现象,其特征值总体分布未知,故不考虑使用参数检验方法。同时由于受试者人数限制,样本量较少,则使用曼-惠特尼U检验方法分析帕金森患者冻结步态的改善情况更为合理。
曼-惠特尼U检验又称秩和检验,是非参数假设检验的一种。其假设两个样本分别来自除了总体均值以外完全相同的两个总体,对两个独立样本数据混合排序求出各个样本的秩序,最小的数据秩序为1,第二小的数据秩序为2,以此类推,分别求出两个样本的秩序之和W1、W2。计算曼-惠特尼U检验统计量:
(4)
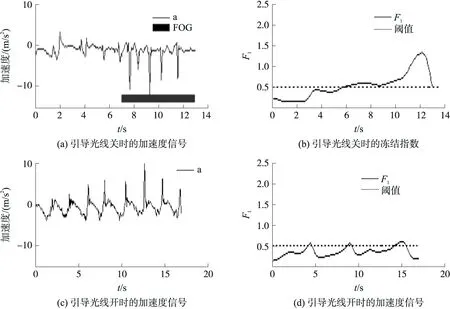
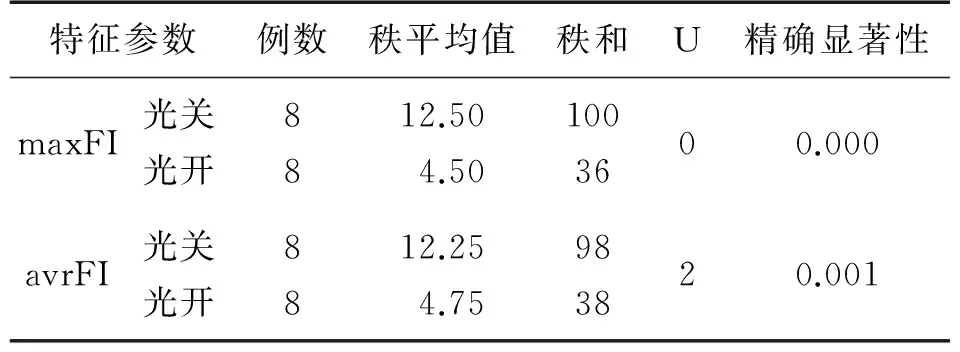
式中:n1为第1个样本量,n2为第2个样本量。取U1和U2中的最小值与临界值UA进行比较,当U 选择8名具有冻结步态的帕金森患者穿戴设备参与步态训练实验,实验中参与者将设备穿戴于左右脚踝两侧,同时保证设备的超声传感器垂直于地面,则其中的惯性传感器的Y轴数据代表垂直于小腿处的加速度。 8名参与者中,男性5名,女性3名,年龄为47岁~73岁(平均62.7岁),患病时间为6年~20年(平均11.6年),H&Y评分平均为3.2。参与者在长为8 m的走廊上行走两次,其中第1次在没有引导光线提示的情况行走,第2次在有引导光线提示的条件下,跨过前方的引导光线行走,测量并采集这两种情况下患者的步态加速度数据并进行对比分析。 以4号对象垂直左小腿处的加速度数据为例。当引导光线关时,在加速度信号图7(a)中,0~7 s时的加速度信号呈现规律性的波动,且较为平稳,而7 s~13 s处的加速度信号发生突变,呈现高频波动,且波动幅值更大,同时反映在冻结指数变化图7(b)中,以0.5为阈值,7 s~13 s处的冻结指数都大于0.5,且有较大的峰值出现,说明4号对象在这一时间段出现冻结步态。当引导光线开时,在加速度信号图7(c)中,整个时间段中的加速度信号呈现规律性的波动,且并没有突变信号产生,同时在冻结指数变化图7(d)中,以0.5为阈值,整个时间段中的冻结指数都小于或接近于0.5,波动平稳,并没有较大的峰值出现,说明对象行走正常,在引动光线提示下冻结步态有所改善。 图7 4号对象引导光线开关下的数据分析 以引导光线开关两种状态下的最大冻结指数maxFI和平均冻结指数avrFI作为特征值对所有8名对象进行统计,统计结果如表1所示。 由表1可知,引导光线开时的maxFI和avrFI参数的平均值小于引导光线关时。同时,利用曼-惠特尼U检验对两种状态下的特征参数进行显著性差异分析,分析结果如表2所示。 由表2可看出,两种特征参数在曼-惠特尼U检验下所求得的精确显著性结果都小于0.01,故在0.01的显著性水平下,引导光线开关前后maxFI和avrFI的两组数据存在显著性差异。根据3.2中的内容,当患者冻结指数越大时说明冻结步态严重程度越高,如表1和表2所示,maxFI和avrFI这两个特征参数在光开状态下的平均值显著小于光关状态下的平均值,说明患者在光开状态下的冻结步态症状减轻,引导光线对于帕金森患者行走步态具有明显的改善作用,该引导光线提示的可穿戴设备作为帕金森病冻结步态的训练评估设备具有功能上的可行性。 表1 参与者相关冻结指数特征值统计表 表2 曼-惠特尼U检验结果 本文研究了一种基于引导光线提示的用于改善帕金森患者冻结步态的可穿戴技术,并利用对象垂直小腿处的加速度信号分析研究引导光线提示对患者冻结步态的改善作用。结果表明,引导光线提示对患者冻结步态具有显著改善。此外,在后期考虑在智能手机采集软件中加入实时评估系统对患者冻结步态进行实时诊断,评估患者在训练时的冻结步态严重程度,方便患者日常生活中的步态训练并为医生提供可靠参考。 [1] 封华,刘承伟. 帕金森病早期诊断的研究进展[J]. 医学综述,2010,16(18):2775-2777. [2] Schaafsma J D,Balash Y T,Bartels A L,et al. Characterization of Freezing of Gait Subtypes and the Response of each to Levodopa in Parkinson’s Disease.[J]. European Journal of Neurology,2003,10(4):391-398. [3] Okuma Y,Yanagisawa N. The Clinical Spectrum of Freezing of Gait in Parkinson’s Disease.[J]. Movement Disorders,2008,23(Supplement S2):S426-S430. [4] Buntingperry L,Spindler M,Robinson K M,et al. Laser Light Visual Cueing for Freezing of Gait in Parkinson Disease:A Pilot Study with Male Participants.[J]. Journal of Rehabilitation Research and Development,2013,50(2):223-230. [5] Vitório R,Liranisilva E,Barbieri F A,et al. Influence of Visual Feedback Sampling on Obstacle Crossing Behavior in People with Parkinson’s Disease.[J]. Gait and Posture,2013,38(2):330-334. [6] 刘美琪,田婧,丁正同,等. 帕金森病冻结步态的康复治疗[J]. 中国临床神经科学,2015,23(6):707-710. [7] Mazilu S,Blanke U,Dorfman M,et al. A Wearable Assistant for Gait Training for Parkinson’s Disease with Freezing of Gait in Out-of-the-Lab Environments[J]. Transactions on Interactive Intelligent Systems,2015,5(1):5:1-5:31. [8] 孙伟,丁伟,李瑞豹. 徒步导航系统中的自适应步态优化检测方法研究[J]. 传感技术学报,2016,29(9):1389-1394. [9] Ahlrichs C,Samà A,Lawo M,et al. Detecting Freezing of Gait with a Tri-Axial Accelerometer in Parkinson’s Disease Patients.[J]. Medical and Biological Engineering and Computing,2016,54(1):223-233. [10] Sijobert B. IMU Based Detection of Freezing of Gait and Festination in Parkinson’s Disease[J]. Sensors,2014,14(4):6819-6827. [11] Tzallas A T,Tsipouras M G,Rigas G,et al. PERFORM:A System for Monitoring,Assessment and Management of Patients with Parkinson’s Disease[J]. Sensors,2014,14(11):21329-21357. [12] 汪丰,邹亚,乔子晏,等. 帕金森患者步行运动的定量分析[J]. 东南大学学报(自然科学版),2015,45(2):266-269. [13] Mazilu S,Hardegger M,Zhu Z,et al. Online Detection of Freezing of Gait with Smartphones and Machine Learning Techniques[C]//International Conference on Pervasive Computing Technologies for Healthcare. 2012:123-130. [14] Jovanov E,Wang E,Verhagen L,et al. deFOG — A Real Time System for Detection and Unfreezing of Gait of Parkinson’s Patients[C]//International Conference of the IEEE Engineering in Medicine and Biology Society. Conf Proc IEEE Eng Med BiolSoc,2009:5151. [15] Niazmand K,Tonn K,Zhao Y,et al. Freezing of Gait Detection in Parkinson’s Disease Using Accelerometer Based Smart Clothes[C]//Biomedical Circuits and Systems Conference. IEEE,2011:201-204. [16] Moore S T,Macdougall H G,Ondo W G. Ambulatory Monitoring of Freezing of Gait in Parkinson’s Disease[J]. Journal of Neuroscience Methods,2008,167(2):340-348. Wearable Technology to Improve Freezing of Gait in Parkinson’s Disease DING Hang1,SHEN Linyong1,WU Xi2*,HU Xiaowu2 (1.School of Mechatronics Engineering and Automation,Shanghai University,Shanghai 200072,China;2.Changhai Hospital,Shanghai 200433,China) Freezing of gait is a common motor complication in Parkinson’s Disease. It can perform as stop during walking or start-hesitation,and significantly affect the quality of PD patients’ life. To improve the freezing of gait,a kind of wearable technology with light cueing is proposed.This technology takes advantage of a marking light in front of the feet to guide the patient. At the same time,it use an inertial sensor for acceleration data collection and the analysis method including freezing index and Man-Whitney U test to study the effect of light cueing on freezing of gait. The result shows that light cueing can improve freezing of gait under a 0.01 significance level. freezing of gait;guiding light;wearable;freezing index;Man-Whitney U test 丁 航(1992-),男,上海大学硕士研究生,主要研究方向为医疗器械及机器人应用,dinghang_shu@163.com; 沈林勇(1962-),男,上海大学机电工程与自动化学院副研究员,主要研究方向为医疗康复机器人技术研究,shenlycn@163.com; 吴 曦(1982-),男,上海市长海医院神经外科主治医师,主要研究方向为脑血管病、肌张力障碍和帕金森病的外科治疗,wuxi_smmu@sina.com。 项目来源:国家自然基金项目(51275282);教育部博士点基金项目(20123108110009) 2016-11-24 修改日期:2017-02-10 TP212.9 A 1004-1699(2017)06-0807-07 C:7500 10.3969/j.issn.1004-1699.2017.06.0014 实验与结果分析

5 结论