基于改进SUSAN算子的车道线检测算法
2017-06-22李让军
李让军,叶 冬
(郑州科技学院 电气工程学院,河南 郑州 450064)
基于改进SUSAN算子的车道线检测算法
李让军,叶 冬
(郑州科技学院 电气工程学院,河南 郑州 450064)
为了准确识别道路的车道线,采用45° Sobel 边缘算子对中值滤波后的道路图像进行增强,进而采用SUSAN算子和Otsu 算法相结合的方法将图像分割,利用分区 Hough变换进行拟合,识别出车道线.实验结果表明,采用改进的SUSAN算子分割后的道路图像能够准确提取车道线参数,拟合出车道线,去除噪声,节省了后续Hough变换的时间,提高了算法的抗噪性能和实时性.
车道线检测;SUSAN算子;Otsu算法;分区Hough变换
车道偏离预警系统可以对注意力不集中的驾驶员进行警告,修正车辆行进的路线,减少因车道偏离而发生事故的概率,是安全驾驶辅助系统的一部分.车道线检测算法是预警系统的关键,能否准确识别道路图像的车道线,关系着后续系统能否正确预警.
从目前的研究状况来看,已有一些识别车道线的算法,如Sobel算子、Canny算子等,这些算法直接获取车道线边缘,但也会获得噪声物体的边缘,存在干扰.SUSAN算子可以获得比较准确的车道线边缘[1],但SUSAN算子的阈值是该算法的关键值,怎样获取合适的阈值是研究的重点.本研究根据道路图像的特点,使用灰度的最大值与最小值和Otsu阈值相结合的方法确定SUSAN算子的阈值,有效地提高了SUSAN算子处理道路图像的效果,能够降低噪声干扰、提高车道线识别的准确性.
1 道路图像预处理
道路图像在采集时,环境噪声、车道线磨损等因素严重影响了有用信息的正确提取.因此,需要对道路图像进行预处理,抑制环境噪声,提高车道线显示的质量.
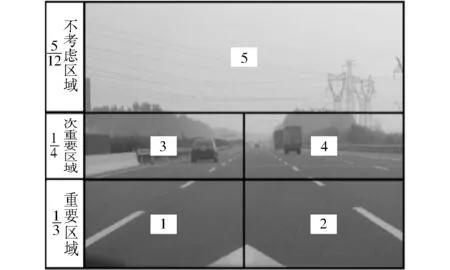
图1 道路图像分区Fig.1 Zoning map of road image

2 边缘增强算法
为了得到车道线特征突出的比较理想的二值图像,需要对道路图像进行边缘增强.常用的边缘增强算子有Robert算子、Prewitt算子和Sobel算子等,考虑到Sobel算子能够抑制噪声的产生且能最大限度地检测出车道线的边界特征,同时考虑到由于透视原因,现实中笔直的车道线在图像中显示为斜线,本研究使用45°的Sobel算子对道路图像进行边缘增强,算子的模板如公式(1)所示:
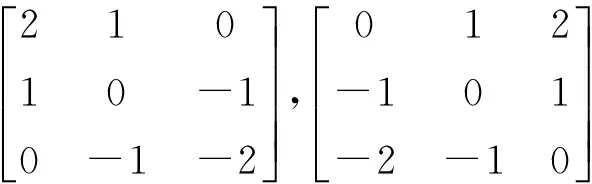
(1)
经过处理,获得了车道线特征突出的图像,如图2所示.

图2 边缘增强后的车道线图像Fig.2 Road image after edge enhancement
3 基于改进SUSAN算子的车道线图像分割算法
3.1 SUSAN算子
SUSAN算子是一种基于局部灰度值特征进行边缘检测的分割方法,由英国牛津大学学者Smith和Brady[3]提出,该算法简单有效,能较好地连接边缘,可以去除图像中的部分噪声,对低层次图像的处理有良好的适应性和可靠性.与传统的全局阈值相比,该算法定位准确,具有较强的抗干扰能力,能够检测出可靠的目标.
用一个圆形模板扫描图像,将模板中的每一个像素灰度值与模板中心的像素灰度值进行比较,如果差值小于设定的阈值t,则将该像素与中心像素归为一类,称为吸收核同值区(USAN,Univalve Segment Assimilating Nucleus).统计USAN区中像素的个数nUSAN并与设定的阈值TUSAN比较,判断该中心像素是否属于某个区域的边缘点,从而实现对目标的检测.本研究采用的SUSAN算子圆形模板半径为3个像素,共有37个像素,用此模板扫描整个图像.按照公式(2)和公式(3)即可求出圆形模板内USAN区的像素个数:
(2)

(3)

3.2 结合Otsu算法的改进SUSAN算子
Otsu提出的基于类间方差最大化的分割算法,一直被认为是分割阈值自动选取的最优算法[4].一维Otsu算法以图像的一维灰度直方图为依据、目标和背景的类间方差为准则来选择最佳的分割阈值,但不能反映图像的局部空间信息,当道路图像受环境噪声干扰、光照不均匀等因素的影响时,仅用Otsu算法难以获得满意的分割效果.

采用SUSAN算子分割预处理后的道路图像,步骤如下:
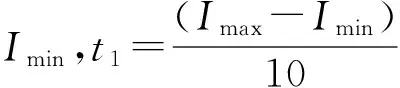
(2)使用一维Otsu算法计算图2的阈值t2;
(3)获取区分特征目标和背景的阈值t=max(t1,t2);
(4)模板在图像中移动,根据t和公式(1)、公式(2)统计某一点的USAN区中像素个数nUSAN;
(5)比较nUSAN和TUSAN,若nUSAN>TUSAN,说明该中心点为背景或目标,设为0;
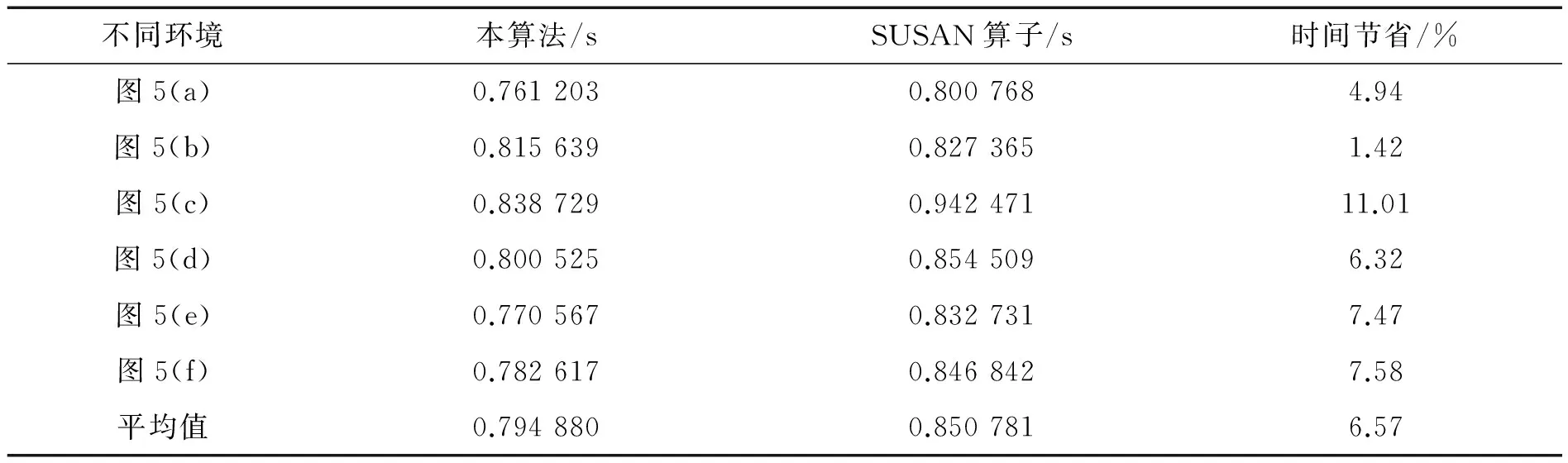
(6)若nUSAN (7)遍历图像,将梯度图像分割,如图3所示. 采用改进的SUSAN算子检测出车道线边缘特征点后,利用分区Hough变换拟合车道线.对比图3可以看出,图3(a)中车道线的直线特征非常明显,容易识别,同时噪声点的数目要远低于图3(b),能够节省Hough变换的时间,提高算法的准确性和实时性. 图3 不同算法分割后的道路图像Fig.3 Road images by using different segmentation algorithm 图4 车道线拟合后的道路图像Fig.4 Road image after the lines were identified 图3(a)有4 207个特征点,Hough算法时间为0.687 611 s;图3(b)有29 444个特征点,Hough算法时间为0.879 289 s;图3(c)有5 115个特征点.因此,既考虑到了图像整体的亮度,又考虑到了灰度图像的亮度分布,分割后的道路图像既能突出车道线特征,又降低了大量噪声,能够提高算法的实时性. 为了验证本算法的效果,课题组在多种环境下进行了实验,识别效果如图5所示. 图5 不同环境下车道线拟合后的道路图像Fig.5 Road image after the lanes were identified in different environment 道路图像比较复杂,对于车道线来说,光线弱、逆光等因素造成了图像对比度降低,阴影、树木、行人等环境噪声会增加提取车道线参数的困难.从图5中可以看出,使用本算法可以准确提取车道线参数,拟合出车道线,能够有效减少特征点的数目和Hough算法拟合车道线的时间,节省了约6.57%的时间,如表1所示. 表1 用本算法和SUSAN算子分别进行图像分割后的Hough变换时间对比Tab.1 Hough transform time after segmented by using the revised algorithm and SUSAN algorithm 在分析道路图像特征的基础上,采用最大类间方差的方法计算SUSAN算子的灰度阈值,这种方法不仅可以提高SUSAN算子的自适应性,也能综合考虑图像的整体信息和局部信息,提高了算法的实用性.本方法具有一定的实时性和抗噪性,可以更快更准确地为车道偏离预警系统提供车道线参数,也适用于其他类似图像的分割. [1] 王荣本,余天洪,顾柏园,等.基于边界的车道标识线识别和跟踪方法研究[J].计算机工程,2006,32(18):195-196. [2] 侯利龙.高速公路车道线检测算法研究[D].郑州:河南工业大学, 2012:9. [3] SMITH S M,BRADY J M.SUSAN—a new approach to low level image processing[J].Journal of Computer Vision,1997,23(1):45-78. [4] 梁光明,孙即祥,马琦,等.Otsu算法在Canny算子中的应用[J].国防科技大学学报,2003,25(5):36-39. [5] 赵志华,蔡健荣,赵杰文,等. SUSAN算子在苹果图像缺陷分割中的应用研究[J].计算机工程,2004,30(15):141-142. [6] 章毓晋.图像工程(上册)——图像处理和分析[M].北京:清华大学出版社,1999:187-190. [7] 贾阳,王荣本,余天洪,等.基于熵最大化边缘提取的直线型车道标识线识别及跟踪方法[J].吉林大学学报(工学版),2005,35(4):420-425. Lane detection method based on improved SUSAN operator LI Rangjun, YE Dong (InstituteofElectricEngineering,ZhengzhouInstituteofScienceandTechnology,Zhengzhou450064,China) In order to identify the lane of the road image accurately, the road image which was filtered by median filter was enhanced by 45° Sobel algorithm. Then the image was segmented by using the method of combining the SUSAN operator and the Otsu algorithm. At last, the lanes were identified by zoning Hough transformation. The results show that the road image which was segmented by improved SUSAN operators can obtain the effective feature points, remove noise, and save time of Hough transformation, improve the anti-noise performance and real-time performance of algorithm. lane detection; SUSAN operator; Otsu algorithm; zoning Hough transformation 2017-03-07 李让军(1988-),女,河南滑县人,助教,研究方向为图像处理. U495 A 1674-330X(2017)02-0051-04
4 分区Hough变换拟合车道线

5 实验结果

6 结语
