气动机械手的PLC控制
2017-06-20鲍小春马天才
鲍小春+马天才
摘 要:介绍了气动机械手搬运机构的组成、气动原理和MOV_B指令的用法,讨论了MOV_B指令在机械手搬运过程中的应用。
关键词:气动机械手;MOV_B指令
1气动机械手的组成
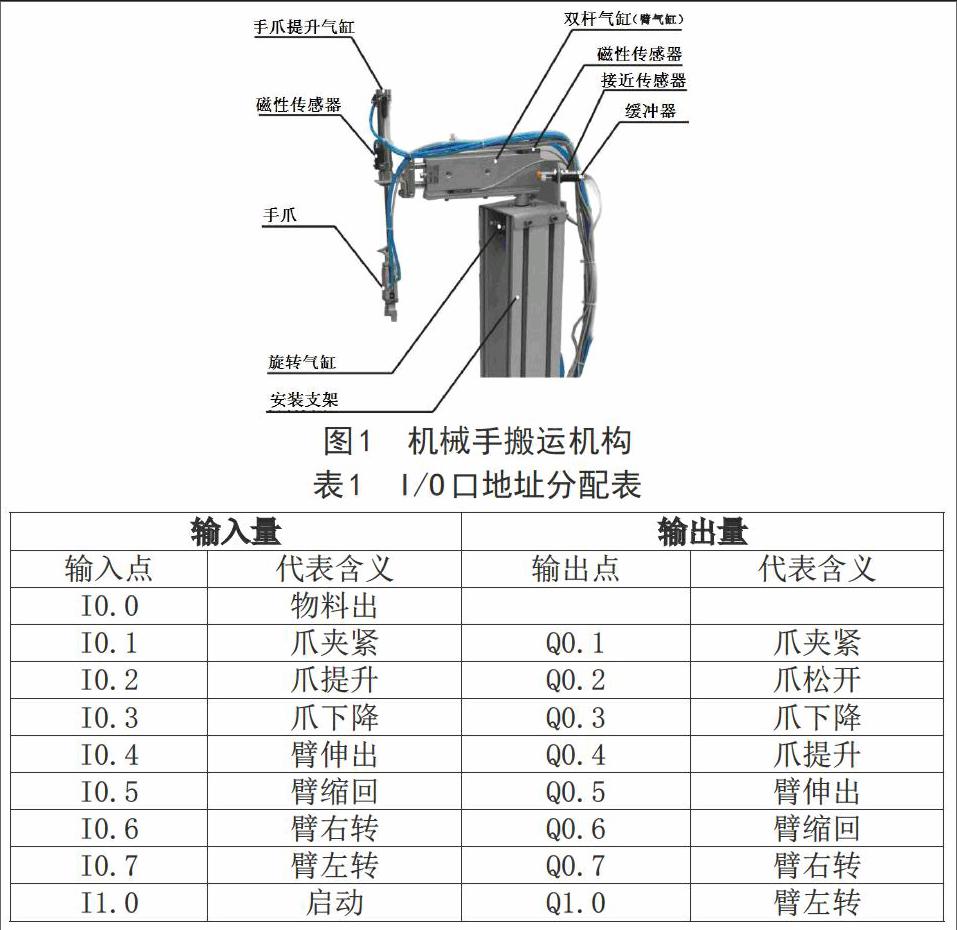
我厂机械采用电控气阀——气缸驱动。检测采用磁性开关、光电开关、接近开关、行程开关等工业上常用的传感器发出检测信号。机械手搬运机构如图1所示。整个搬运机构能完成四个自由度动作:手臂伸缩、手臂旋转、手爪上下、手爪紧松。手爪提升气缸:提升气缸采用双向电控气阀控制,气缸伸出或缩回可任意定位;双杆气缸:机械手臂伸出、缩回,由双向电控气阀控制;旋转气缸:机械手臂的正反转,由双向电控气阀控制;磁性传感器:检测手爪提升气缸处于伸出或缩回位置;手爪:抓取物料由单向电控气阀控制,当单向电控气阀得电,手爪夹紧时磁性传感器有信号输出,单向电控气阀断电,手爪松开;接近传感器:机械手臂正转和反转到位后,接近传感器信号输出;缓冲器:旋转气缸高速正转和反转到位时,起缓冲减速作用。
2气动机械手气动原理
气动主要分为两部分:第一部分,气动执行元件部分有单出杆气缸、单出双杆气缸、旋转气缸。第二部分,气动控制元件部分有单控电磁换向阀、双控电磁换向阀、磁性限位传感器。
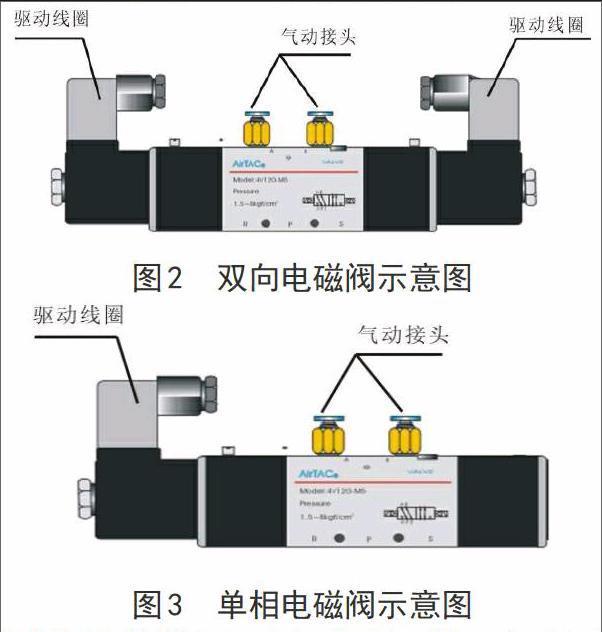
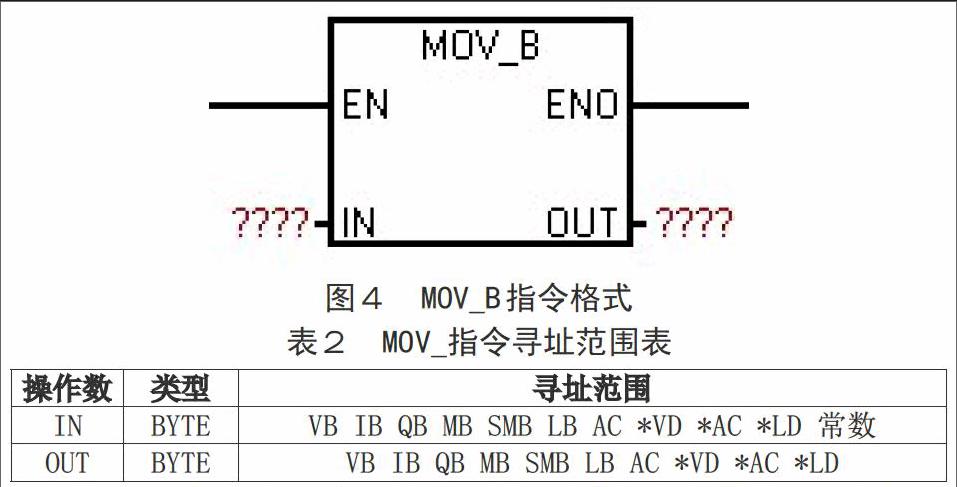
双向电控阀用来控制气缸进气和出气,从而实现气缸的伸出、缩回运动。电控阀内装的红色指示灯有正负极性,如果极性接反了也能正常工作,但指示灯不会亮。双向电磁阀示意图图2所示。单向电控阀用来控制气缸单个方向运动,实现气缸的伸出、缩回运动。单向电磁阀示意图图3所示,与双向电控阀区别在双向电控阀初始位置是任意的可以随意控制两个位置,而单控阀初始位置是固定的只能控制一个方向。
3控制方案
本控制采用西门子PLC作为控制器,通过用户程序实现对机械手搬运机构的逻辑控制,可靠实现机械手的启、停和各种动作。PLC全部采用开关量控制,输入量包括启动、停止、送物料出、手爪夹紧点、手爪提升、手爪下降、手臂伸出、手臂缩回、手臂左转、手臂右转、紧急停止,共12点;输出量包括手爪夹紧、手抓松开、手抓下降、手抓提升、手臂伸出、手臂缩回、手臂左转、手臂右转,共8点。因此选用S7-200CPU226CN完全能够满足要求。I/O口地址分配如表1所示。控制程序指令选择MOV指令。
3.1MOV指令介绍
MOV指令有MOVB,MOVW,MOVD,MOVR四类,分别是字节传送、字传送,双字传送、實数传送。根据表1可知,机械手一个流程总共有12个动作,一个字节的最大存储数值是255,所以选用字节传送就能满足编程要求。
在梯形图中,字节传送指令以功能框的形式编程,如图4所示,指令名称为MOV_B。当允许输入EN有效时,将一个无符号的单字节数据IN传送到0UT中。IN和0UT的寻址范围如表2所示。
3.2程序编写
控制程序如图3所示,程序编写使用了MOV_B指令,给VB0中存放不同的数值,机械手就有不同的动作,比如VB0=1时,机械手手臂伸出,VB0=2时,机械手手臂下降。SM0.1在上电时执行一次扫描周期,将VB0存储地址中的值清零,为机械手的正确动作做好准备。当机械手走完一个流程时(即第12个动作走完),对VB0存储地址中的值清零,为机械手下一流程动作做好准备。
4结束语
气动机械手搬运机构在工业自动化生产过程中应用非广泛,其控制方法也很多,有用步进指令控制的、也有寄存器左移指令控制的……,用MOV_B指令控制机械手搬运机构是借鉴了企业的做法。在工厂,工人师傅希望用最简单的方法解决问题,并且他们习惯将问题顺序处理。这种方法在教学中也得到了验证,学生容易、也乐意接受,并且试验和现场应用表明,利用PLC传送指令控制机械手完成各种动作,具有较高的稳定性和准确性。
作者简介:
鲍小春,男,主要从事于机械检修与机电一体化设备控制的研究工作。
马天才,男,长期从事于工业电气控制和电机控制的研究工作。
