浅议自动扶梯附加制动器与非操纵逆转保护装置
2017-06-19童宁
童宁
摘 要:本文介紹自动扶梯/自动人行道附加制动器与非操纵逆转保护装置的功能和结构型式,分析二者之间的区别与联系,并对二种的检验方法进行了探讨。
关键词:自动扶梯; 附加制动器; 非操纵逆转保护
Auxiliary Brake and Direction Reversal Device of Escalators
Tong Ning
Abstract: This paper introduced the function and structure of the auxiliary brake and direction reversal device of escalators and passenger conveyors, analyzed the differences and similarities between auxiliary brake and direction reversal device, and discussed test methods of the both.
Key words: Escalators; Auxiliary Brake; Direction Reversal Device
引言
附加制动器和非操纵逆转保护装置均是自动扶梯和自动人行道的重要的安全保护装置之一,自动扶梯和自动人行道(以下简称自动扶梯),其附加制动器和非操纵逆转保护在功能上既有区别又有联系,在结构上都型式多样,对于一般的检验员在现场检验时均不易操作,尤其是新取证的检验员更不容易掌握,因此,笔者结合在日常工作中的点滴体会对二者在功能要求、结构型式和检验方法进行进一步探讨,以供参考!
1.附加制动器与非操纵逆转保护装置的功能
1.1 附加制动器的功能
在国标GB 7024-2008 《电梯、自动扶梯、自动人行道术语》中定义附加制动器为“当自动扶梯提升高度超过一定值时,或在公共交通型自动扶梯或自动人行道上,增设的一种制动器”。国标GB 16899-2011《自动扶梯和自动人行道的制造与安装安全规范》(以下简称GB 16899-2011)第5.4.2.2.1条规定,在下列任何一种情况下,自动扶梯和倾斜式自动人行道应设置一个或多个附加制动器:a)工作制动器与梯级、踏板或胶带驱动装置之间不是用轴、齿轮、多排链条或多根单排链条连接的;b)工作制动器不是符合5.4.2.1.2规定的机-电式制动器;c)提升高度大于6m。
引入附加制动器的目的,不是取代工作制动器,而是当工作制动器无法对梯级实施有效制约时才参与工作。在GB 16899-2011第5.4.2.2.1条规定的三种情况下,工作制动器可能不能对梯级链进行有效制约,因此,需要附加制动器对工作制动器进行补充,例如驱动链断裂,梯级链即与驱动主机和工作制动器失去联系、工作制动器失效或者制动力不足,即使工作制动器动作,也不能有效控制梯级链下滑,均需要附加制动器及时动作进行有效制停。
1.2 非操纵逆转保护装置的功能
GB 16899-2011第5.4.2.3.2条规定,自动扶梯和α≥6°的倾斜式自动人行道应设置一个装置,使其在梯级、踏板或胶带改变规定运行方向时自动停止运行。在国标GB 7024-2008 《电梯、自动扶梯、自动人行道术语》中对非操纵逆转保护装置的定义为“在自动扶梯或自动人行道运行中非人为的改变其运行方向时,能使自动扶梯或自动人行道停止运行的电气装置”。
非人为的改变其运行方向,即为非操纵逆转。根据自动扶梯和自动人行道运行特点,非操纵逆转一般发生在向上运行的情况下意外向下溜车。发生非操纵逆转的情况一般有两种:一是负载力矩大于电动力矩,对于向上运行的自动扶梯或自动人行道,当电动机输出的电动力矩大于由负载和乘客产生的负载力矩,自动扶梯或自动人行道按规定方向正常向上运行,反之当负载力矩大于电动力矩时,自动扶梯或自动人行道则向下溜车;二是由于驱动链的断裂或脱落,使驱动主机与驱动链之间的连接断开,梯级失去主机和工作制动器的约束,在自重和负载作用下,会出现失控溜车,由于惯性的原因,可能溜车的速度会越来越快。如发生上述情况时,需要非操纵逆转保护装置动作,使自动扶梯停止运行。
2.附加制动器与非操纵逆转保护装置的结构型式
2.1 附加制动器的型式
GB 16899-2011第5.4.2.2.4条规定,附加制动器应在下列任何一种情况下均应起作用:a)在速度超过名义速度1.4倍之前;b)在梯级、踏板或胶带改变其规定运行方向时。即附加制动器既有超速保护功能,且必须具有非操纵逆转保护功能。附加制动器制停减速度不大于1m/s2,如果电源发生故障或安全回路失电,附加制动器和工作制动器同时动作。在附加制动器动作时,工作制动器一定也已经动作。附加制动器应为机械式并利用摩擦原理。工作制动器作用于驱动主机的高速轴,而附加制动器常作用于驱动主轴和梯级链轮,直接使驱动主轴和链轮停止运转并保持停止状态,同时将梯级链和梯级停止运转。
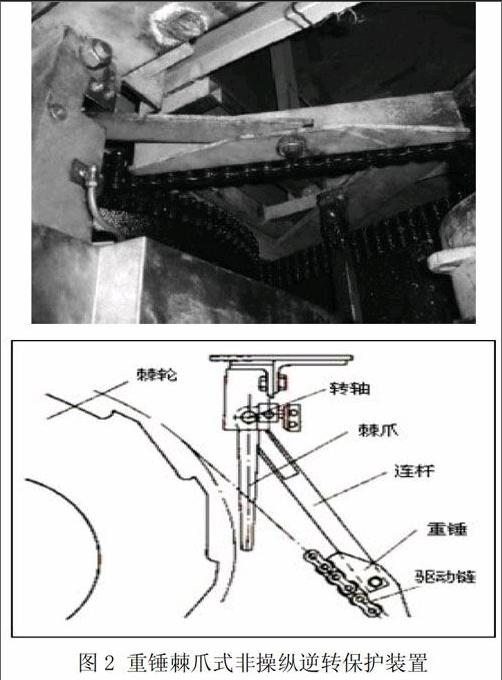
由于目前自动扶梯的附加制动器结构多样,各扶梯品牌之间型式不能统一,以某品牌采用的一种型式为例,如图1 所示,由棘轮、棘爪、电磁铁组件和制动器支座等组成。该附加制动器可以实现在主电源失电、超过额定速度1.4倍、驱动链断裂和非操纵逆转等情况出现时动作。正常运行时,电磁铁组件得电,棘爪从棘轮处完全松开,棘轮随链轮自由旋转;当满足动作条件时,电磁铁组件失电,棘爪因杠杆作用上抬,直至啮入棘轮,将棘轮卡住,静止的棘轮上的摩擦元件与链轮之间发生摩擦,直至链轮停止运转。附加制动器只是执行制停的装置,要实现超速、驱动链断裂和非操纵逆转情况下动作,必须有相应的速度监控、驱动链监控和非操纵逆转监控装置触发附加制动器。endprint
例如国内知名品牌“迅达”和“OTIS”自动扶梯采用的附加制动器与本文介绍型式结构类似,都是由触发装置和制停装置组成,触发装置即驱动链断链开关等安全开关和速度监控元件等,制停装置都是由安装在主轴附近的电磁铁得失电后带动连杆,使棘轮棘爪、制动靴等制动机构动作。配合速度监控、梯级监控、驱动链监控装置,可以实现在自动扶梯失电、超速、驱动链断裂或脱落、非操纵逆转等情况下动作。
除了上述型式,还有双驱动主机型和双工作制动器型的附加制动器。双驱动主机型一般是用于重型或大提升高度的自动扶梯或自动人行道,双驱动主机的工作制动器互为附加制动器。双工作制动器型是制动系统采用两套工作制动器进行制动,互为附加制动器。双驱动主机型由于有两套驱动、制动和传动机构,安全冗余度较高,但双工作制动器型,由于兩套制动器都安装于电动机侧,假如联轴器失效或者驱动链断裂,即使两套制动器都动作,也不能对主轴和梯级有效约束,无法防止非操纵逆转。
2.2非操纵逆转保护装置
防止非操纵逆转一般是通过监控装置,对扶梯的状态进行监控,一旦发生自动扶梯与规定运行方向相反,即立即切断正常运行指令,使制停装置动作,使自动扶梯停止运行。
监控装置分为机械式、机械开关和传感器三种型式,机械式的监控装置一般是由运行方向已经发生改变的梯级或者驱动链断裂,带动机械装置动作,从而触发制停装置;机械开关是驱动链断链保护开关,或者由打杆、凸轮等带动的机械开关,梯级链改变运行方向将带动打杆、凸轮等产生偏移,从而使机械开关动作,一旦机械开关动作,启动防逆转保护功能;传感器监控主要是通过速度检测,扶梯运行方向从上向下改变时,必然有一个速度减小到零再反向的过程,因此在正常的上行指令下检测到扶梯相对低速或者速度为零的状态,就会启动防逆转保护功能,在逆转发生之前就使扶梯停止运行,传感器式也有通过一前一后两个接近开关来监测梯级运行方向,一旦出现运行方向逆向,应停止运行。
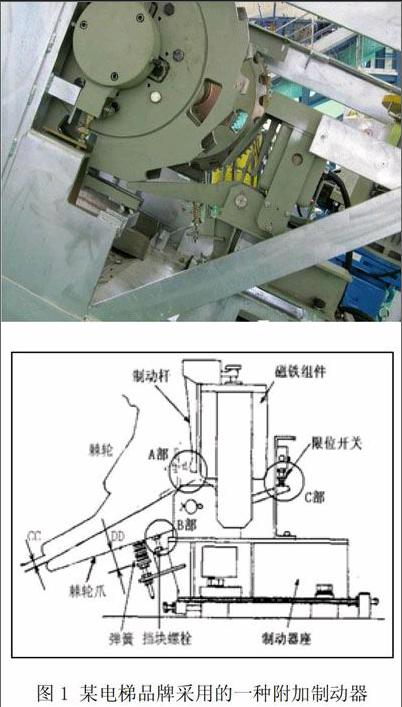
机械式的非操纵逆转保护装置期中一种型式为重锤棘爪式,由驱动链断裂触发制停装置动作,如图2 所示,监控装置由棘爪、连杆、重锤和棘轮组成,棘爪和连杆同轴,二者之间的角度可调整,正常运行时,棘轮与驱动主轴一起转动,重锤压在传动链上,与传动链相对滑动,一旦传动链断裂,重锤在重力作用下向下摆动,通过连杆与轴带动棘爪也顺时针转动,卡入棘轮,使棘轮制动;制停装置式安装在驱动主轴上的摩擦制停装置,被卡主的棘轮动过摩擦制停装置使驱动主轴制停并保持停止。重锤棘爪式只能对因驱动链断裂而导致的非操纵逆转进行保护,而对制动力不足造成的逆转无法进行防护,且没有超速保护功能,在主电源失电时也不会动作,因此只是单纯的非操纵逆转保护装置,不是附加制动器,可用作非必须安装附加制动器的场合。
对于配置有附加制动器的扶梯,非操纵逆转保护的监控装置多是机械开关式和传感器式的。机械开关式由驱动链断链保护开关监测驱动链状况,或者机械开关监测梯级链运行方向;传感器式通过传感器检测扶梯运行速度或运行方向,触发附加制动器动作,使扶梯制停,即附加制动器用作非操纵逆转保护装置的制动装置。上述的几种附加制动器皆有此功能。这里检测扶梯运行速度的传感器,应直接检测梯级、梯级链或者梯级链轮的运行速度,而不应检测主机速度来代替,因为在驱动链断裂等意外情况下,主机的速度不能反应梯级运行情况。
3.附加制动器与非操纵逆转保护装置的检验
《电梯监督检验和定期检验规则——自动扶梯和自动人行道》TSG T7005-2012第6.13条对附加制动器的检验方法描述不够清晰,通常的检验方法是:对照自动扶梯或自动人行道的结构及提升高度,检查是否需要配置附加制动器;检查附加制动器的型式是否符合要求;手动模拟试验,因超速情况多是经过控制系统计分析速度检测信号,通过计算判断是否超速,从而控制附加制动器动作,不方便人为模拟,所以手动模拟试验多是通过模拟非操纵逆转的情况,观察附加制动器是否动作。
《电梯监督检验和定期检验规则——自动扶梯和自动人行道》TSG T7005-2012对非操纵逆转保护装置的检验方法同样描述不够清晰,未作详细规定。对于重锤棘爪式的非操纵逆转保护装置,可以通过调整棘爪和连杆之间的角度,使得在驱动链完好的情况下,棘爪已卡入棘轮,切断主电源,人工向下盘车,观察制停装置动作和制停情况;机械开关型式可以人为动作安全开关,观察附加制动器动作和制停情况;对于传感器测速型式,在停梯状态下,撤去传感器监控,然后启动扶梯,如果扶梯能够启动,且启动后马上停止,则认为非操纵逆转保护有效。
4.结语
综上所述:附加制动器型式多样,要求在结构和功能上能够满足安全性能的要求,目前还有些品牌采用的附加制动器在功能上并不能完全符合国标GB16899-2011规范要求,非操纵逆转保护只是一种安全保护功能,它可以是单独的触发和制停装置,也可以是附加制动器配合监控装置来实现,同样它的结构多样,建议在实施监督检验和定期检验中对二者多加注意,必要时通过模拟试验来确认,防止一旦出现故障不能可靠动作,带来安全隐患。endprint
