基于虚拟现实的操作空间度量方法与工具设计
2017-06-19文天乐
文天乐
本论文来自于基于虚拟现实的维修性工程,主要研究内容为实现虚拟环境中产品的维修操作空间自动定量评价。通过查阅和学习现有的维修操作空间及相近概念的定量评价方法,提出新的更适宜的评价方法和评价标准,最终制定出标准化的维修性自动评价方法,并在CATIA和DELMIA环境下进行实现和实例验证。这一方法为实际工程中定量评价虚拟环境中产品的维修性设计水平提供了参考依据。
随着电子、机械等工业技术的飞速发展和生产商对加工精度要求的不断提高,产品的固有可靠性逐步提高。然而,无论产品的固有可靠性提高到哪种程度,都不可能达到百分之百,随着贮存、运输和使用等时间上的积累,产品总会有发生故障的时候。一旦产品发生故障,必须有方便快捷、经济实惠的维修手段以恢复产品的性能。因此,维修是否快速有效将直接关系到使用者的经济利益。产品的维修可达性将直接影响维修活动工作量的大小,改善产品的维修可达性将极大的提高产品的系统效能,同时节省产品的寿命周期费用。由于产品的维修可达性是产品本身固有的质量特性,因此解决维修可达性问题必须从设计人手。
随着计算机信息科学的飞速发展,尤其是本世纪在计算机图形学技术、高性能图形系统和虚拟现实方面的诞生了不少的研究成果,维修过程在获得实物样机或原型机之前就可以开始进行。产品设计和开发的模式也随之发生了变化。DELMIA、Jack等计算机辅助设计软件和技术的广泛应用,可以辅助设计人员完成包含数字样机、虚拟维修人员和虚拟维修工具的虚拟维修操作流程仿真。在设计阶段即开展对设计方案和设计布局的数字仿真,可以避免实物原型的制作,节约了从设计到定型的时间,提高了设计效率,从而降低了开发成本;前期开展的虚拟维修工程评价工作,在一定程度上优化了设计方案和设计布局,因此可以避免不合理的设计,减少给后续维修工作造成的不便。
维修操作空间定量评价方法
维修是一种需要人参与的活动,适当的维修空间将提高维修效率和维修人员的舒适程度。这一节的主要内容是确定适当的维修操作空间的大小。
在设计产品时,适当的操作空间的具体尺寸需要依据维修人员的身体尺寸和操作姿态来确定。因此维修操作空间应考虑维修人员的影响因素,如实体可达性。人的上肢可以接触到的空间范围分为最佳范围、正常范围和最大范围。人体上肢的作业范围是一个三维空间,维修人员的最大操作空间和舒适度随着操作高度、手臂延伸线与人体中线的夹角角度的改变而发生变化。为了便于分析人体上肢的操作范围,建立数学模型描述人体各部分的尺寸和相对位置。
软件工具设计和案例探究
CATIA是法國达索公司(Dassault Systemes)与IBM公司(International Business Machines Corporation国际商业机器公司)联合开发的一款CAD/CAE/CAM软件,主要为客户提供产品外形设计、机械零件设计、配合结构设计、组装、数控加工等功能,并提供大量的标准尺寸零件模型,使得企业可以缩短开发周期,快速迭代设计方案,对市场需求做出敏捷的反应。CATIA是目前应用最广泛数字样机设计开发软件之一,应用范围涵盖等航空航天、建筑、船舶、汽车、铁路等多个领域。DELMIA(Digital Enterprise Lean Manufacturing Interaction Application)是法国达索(Dassault Systemes)公司生产的一款数字化企业的互动制造应用软件,是PLM(Product Life Management)系列产品之一。该软件与CATIA互为补充,呈现上下游关系,共同贯穿产品的设计周期。利用CATIA制作数字样机后,可在DELMIA中进行物流过程分析、维修、装配、工艺规划、与机器人配合等多种功能的虚拟演示和模拟,是一个面向设计、制造、维护、人机过程的“数字化工厂”仿真平台。便于用户检查设计方案的缺陷和漏洞,及时更改设计方案,降低研发成本,缩短研发时间,实现快速上市的目的。DELMIA中含有一个Human Task Simulation模块,包含虚拟人模型、人体动作模型、维修工具等内容,用于模拟人机交互过程,实现虚拟维修、虚拟拆卸、虚拟装配等功能,也是本研究中重点使用的模块,包含本研究中所需要的大部分数据。本研究基于CATIA与DELMIA现有的软件功能和数据库进行二次开发,研究目标是在客户已经完成产品设计和数字样机的制作的情况下,根据已制作好的虚拟维修仿真动画,针对产品的维修操作空间的完成定量评估。
软件的二次开发是在现有软件产品的基础上,对软件功能进行延伸和扩展,或实现和其他软件的对接并实现数据的交换和传输。二次开发一般针对某一类特定的用户,通过添加更个性化、专业化的功能和模块,使得软件功能更具有针对性,用户的需求得以实现,工作效率得以提高。DELMIA为不开源的软件,为实现二次开发必须利用软件开发商为用户专门准备的二次开发接口。为灵活地满足不同客户的需要,DELMIA提供了多种二次开发的接口:一是CAD格式接口,方便客户加载在CAD环境下设计的数字样机,实现模型结构、尺寸、颜色渲染等数据的导入导出;二是知识工程,这是DELMIA的一个专门模块,知识工程利用参数化定义的方法对人体模型和基础动作单元进行了建模,建立一个标准模型库,用户可以通过关键参数调用标准模型库中的模块,从而实现快速建模,完成设计任务;三是采用自动化对象编程的接口Automation API(Application Programming Interface),能够实现宏指令的编写,或利用宏与VB开发语言(Visual Basic)相结合编写简易程序;四是开放的基于构件的应用编程接口CAA(Component Application Architecture,应用组件架构),这是DELMIA的一套C++函数库,这一接口主要用于与C++开发语言链接,方便客户使用C++编写所需程序,用户可通过快速应用研发环境RADE(Rapid Application Development Environment)和不同的API(Application Programming Interface)接口完成从DELMIA数据库中调取数据到C++程序中的过程。
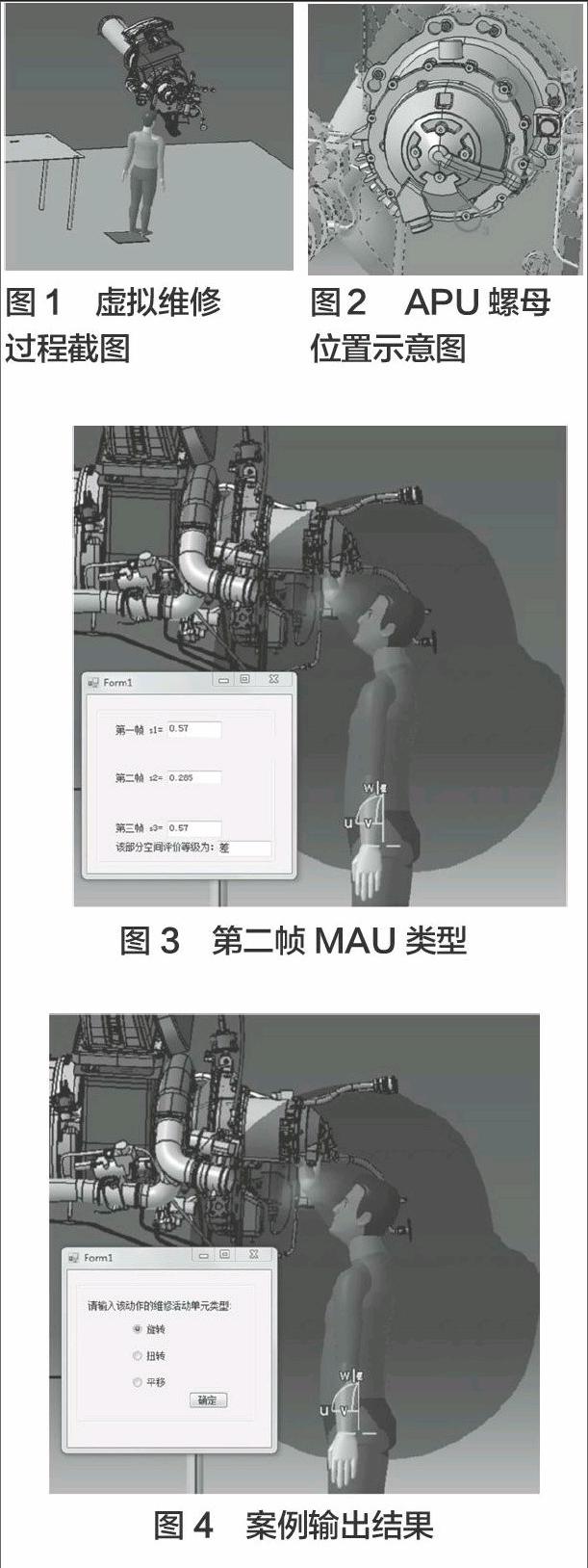
该案例为针对拆卸某型号大型客机APU上六角螺母的维修空间定量评估。目的是利用所提出的方法和开发的软件工具,对维修操作空间进行定量评价,以展示方法的灵活性和有效性以及软件的可用性和可靠性。该大型客机APU的虚拟维修操作动画截图如图1所示。该大型客机APU上有12颗六角螺母,选取123号螺母作为典型案例,三颗螺母的位置如图2所示。
这三颗螺母中,显然3号周围的障碍物少,对扳手的使用影响较少,同时位置较低,距离肩膀较近,手臂只需微微向上伸出即可接触到,因而上肢舒适度较高。该螺母周围的空间无需定量评估,定性评估即可确定等级为优秀。1号螺母虽然位置很高,但是周围的障碍物少,手部可达到1200旋转。2号螺母位置较高且周围障碍物较多,维修人员手部只能达到600旋转。本案例中选取2号螺母进行分析。
第一步打开程序,连接虚拟环境,选定虚拟人并连接。第二步选定关键帧,抓取扳手之后,选取手部携工具接近、旋转卸下六角螺母、手部携工具离开这三帧内容。第三步系统提示选取第一帧的维修活动单元类型,为平移,此时软件自动计算第一帧的扫掠舒适度PV、上肢舒适度r和该帧总舒适度s,x=0,y=0,z=1,但不在界面中显示。第四步系统提示选取第二帧的维修活动单元类型,为旋转,如图3所示,此后软件自动计算第一帧的扫掠舒适度Pv、上肢舒适度r和该帧总舒适度s,x=0,y=1,z=1,但不在界面中显示。第五步系统提示选取第三帧的维修活动单元类型,为平移,此时软件自动计算第三帧的扫掠舒适度Pv、上肢舒适度r和该帧总舒适度s,x=0,y=1,z=2,但不在界面中显示。第六步系统自动根据已有的x、y、z,计算s的评价标准,(0.8x+0.75y+0.9z)为优秀阈值,(0 5x+0.25y+0.7z)为差阈值,该部分不在界面中显示。第七步系统输出三帧中每一帧的s值,并与s的优秀阈值和差阈值比较,给出空间评价结论。该案例中具体数据截图如图4所示。得出结论该部分操作空间维修性差,必须加以改进。
本文以维修操作空间为研究对象,在前人基于扫掠体积的维修操作空间的定量评价方法的理论基础上,对与维修操作空间相近的概念进行学习和研究,参考作业空间的评价方法,在维修操作空间的定量评估中加入针对上肢舒适度的评判标准。在熟练掌握DELMIA使用方法的基础上,对其进行二次开发,基于前述原理完成软件工具设计,并取得了實现。利用某型号大型客机APU对该原理及软件工具进行了实例验证,证实了该方法的可行性和该软件的实用性。
本研究取得的成果主要有:对维修操作空间的定量评价方法进行了改进,提出了包含更多影响因素的定量评价方法,并提出了针对该方法的评价标准;基于所提出的方法进行软件工具的二次开发和实现,验证了本项研究的实际应用价值,为产品的工业设计提供了一种参考标准和参考工具。
由于时间紧张,没有对该方法中基于手部扫掠体积的评价标准进行验算和修正,且在定义上肢舒适度r值的定义过程中,采用的模型过于简略,方法近乎简单粗暴。后续可以在这两方面进行深入的研究和探讨。
