一种基于亮度阈值的激光光斑中心定位算法
2017-06-19郭玉静
郭玉静, 魏 丽
(唐山学院 机电工程系, 唐山 063000)
一种基于亮度阈值的激光光斑中心定位算法
郭玉静, 魏 丽
(唐山学院 机电工程系, 唐山 063000)
激光光斑图像的光斑中心定位是激光位移检测中的关键技术之一. 为提高桥梁挠度测量系统的实时性能, 本文针对测量中激光光斑图像的特点, 提出了一种确定光斑中心位置的方法. 利用激光图像中光斑区域与其它区域亮度差别较大的特点, 确定亮度阈值并将光斑图像进行二值化处理, 得到一幅仅有激光光斑的图像, 根据圆上平行弦的中点连线通过圆心的原理, 通过求弦的中点确定圆心. 本方法原理简单, 计算量小, 计算速度快, 能够满足测量系统的实时性要求, 已在测量实验中取得了较好的效果.
激光图像; 光斑中心; 定位算法; 亮度阈值; 桥梁挠度测量
0 引 言
激光具有能力集中、 方向性好、 发散角小等优点, 因此在桥梁挠度检测领域获得了比较广泛的应用[1-3]. 激光位移测量是通过激光光斑中心位置的改变得到位移量, 因此, 如何确定激光光斑中心位置就成为激光位移检测中的关键技术. 光斑中心定位方法有重心法[4]、 Hough变换法[5]、 圆拟合法[6]、 亮度梯度法[7]、 梯度算子法[8,9]等, 这些方法都能够很好地定位激光光斑中心.
激光成像时, 激光信号经过较大距离的传播到达投影靶, 由于激光本身的衍射和散射, 在投影靶上形成的图像不再是均匀的光斑, 而是存在着一些衍射条纹和散射弱光的图像, 并且由于测量环境的复杂性, 现场可能存在自然光以及其它光线等, 导致激光光斑亮度减弱、 局部出现亮点等. 针对这些问题, 可以对图像进行差分运算、 滤波以得到相对纯净的激光光斑, 提高检测系统的抗干扰性[9,10]. 本文对经过信号预处理后的激光光斑图像提出了一种光斑中心定位方法并进行详细的阐述. 经过实验验证, 该方法能够满足检测系统的实时性要求.
1 图像分析
在桥梁挠度测量实验中采集激光图像信号, 经过信号预处理之后的激光光斑图像如图 1 所示, 图像中光斑亮度均匀、 饱和, 周围存在衍射条纹, 其亮度远远低于光斑中心规则部分的亮度, 因此光斑边缘清晰.
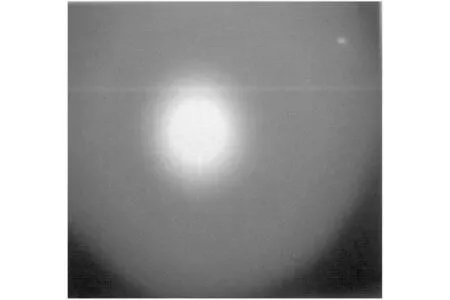
图 1 信号预处理后的激光光斑图像Fig.1 Laser spot image after signal preprocessing
将图像转换成灰度图像, 设图像数据矩阵大小为A*B, 图像上每个像素的亮度值为G(i,j)(1≤i≤A, 1≤j≤B, 无量纲), 以图像像素列坐标j为自变量, 自上向下画出6条等间隔行上的像素亮度曲线, 如图 2 所示. 从图 2 可以看出, 图像上、 下部分((a), (e), (f))的亮度曲线变化比较平缓, 亮度变化不是特别大, 其亮度最大值不超过150, 说明这部分应该是光斑周围区域; 在图像中间部分((b), (c), (d)), 随着列坐标的变化, 亮度曲线在中间部分有一个突变, 越靠近中间的行((c)), 最大亮度值保持长度越长, 这应该是靠近光斑中心的行, 而越靠近上下两边的行((b), (d)), 最大亮度值保持长度比较短, 减弱越快, 这部分应该是靠近光斑边缘的行. 根据图像亮度分布的特点, 可以选择合适的亮度阈值去除光斑周围区域, 将图像转换成一个二值图像, 再根据二值化结果确定光斑的中心.

图 2 激光光斑图像的亮度曲线Fig.2 Intensity curve of laser spot image
2 阈值选择与图像分割
随着时间的增加, 激光光斑中心的亮度也会有所减弱, 因此, 阈值不能是固定的、 一成不变的值. 根据对光斑图像的分析, 将阈值确定为

(1)
式中:m为图像中的亮度最大值.
使用该阈值对光斑图像进行二值化处理后的结果如图 3 所示.

图 3 阈值分割后的光斑二值图像Fig.3 Binary image of laser spot after segmentation
3 光斑中心的确定
实际上对于位移检测, 原理上是求光斑位置的相对变化量(即光斑的位移), 不必精确确定光斑的中心或圆心, 因此在测量中, 用亮度阈值将光斑图像转换成一个二值图像后求光斑中心, 两次测量光斑中心的相对变化量就是光斑的位移. 二值化之后的光斑图像形状比较规则, 对称性好, 使用简单的中心计算方法即可求出光斑的中心.
二值图像中光斑内部同一行上的像素连接成圆的弦, 根据几何知识, 所有平行弦的中心连线是一条通过圆心的直线, 因此原理上所有水平平行弦中点的列坐标就是圆心的列坐标, 同样的道理, 所有垂直平行弦中点的行坐标也是圆心的行坐标.
设二值图像数据矩阵为X(i,j), 其中光斑的集合为E, 则

(2)
逐行扫描光斑图像, 求出E中某一行上像素列坐标的平均值Yi作为该水平弦中心列坐标, 对所有水平弦的中心列坐标求平均值, 即是圆心的列坐标y.
(3)
(4)
式中: n为E中i行像素的个数, N为E中包含的行数.
同样的道理, 可以求出光斑中心的行坐标x.
4 结 论
本文采用相对亮度阈值对光斑图像进行二值化处理, 利用圆的平行弦的中心连线通过圆心的原理, 使用简单的计算方法即可得到光斑的中心坐标. 本方法算法简单、 计算速度快, 可以满足测量系统实时性的要求.
[1] 董辉, 陈伟民, 符欲梅, 等. 一种激光图像挠度测量方法[J]. 传感器技术, 2004, 23(10): 63-65, 68.DongHui,ChenWeimin,FuYumei,etal.Methodoflaser&imagingdeflectionmeasurement[J].JournalofTransducerTechnology, 2004, 23(10): 63-65, 68. (inChinese)
[2] 蓝章礼, 张洪, 周建庭. 基于激光和视频的桥梁挠度测量新系统[J]. 仪器仪表学报, 2009, 30(11): 2405-2410.LanZhangli,ZhangHong,ZhouJianting.Novelsystemformeasuringbridgedeflectionsbasedonlaserandvideo[J].ChineseJournalofScientificInstrument, 2009, 30(11): 2405-2410 (inChinese)
[3] 张奔牛, 李星星, 宋军, 等. 激光投射式位移传感技术在桥梁挠度检测中的应用研究[J]. 传感技术学报, 2009, 22(5): 755-759.ZhangBenniu,LiXingxing,SongJun,etal.Applicationstudyonlaserprojectionsensorforbridgedeflectiondetection[J].ChineseJournalofSensorsandActuators, 2009, 22(5): 755-759. (inChinese)
[4] 董辉, 陈伟民, 符欲梅, 等. 激光图像挠度测量系统稳定性实验研究[J]. 激光杂志, 2004, 25(5): 25-26.DongHui,ChenWeimin,FuYumei,etal.Studyonstabilityoflaser&imagingdeflectionmeasurementsystem[J].LaserJournal, 2004, 25(5): 25-26. (inChinese)
[5] 杨耀权, 施仁, 于希宁, 等. 用Hough变换提高激光光斑中心定位精度的算法[J]. 光学学报, 1999, 19(12): 1655-1660.YangYaoquan,ShiRen,YuXining,etal.Analgorithmtoraisethelocatingprecisionoflaserspotcenterbasedonhoughtransform[J].ActaOpticaSinica, 1999, 19(12): 1655-1660. (inChinese)
[6]ThomasSM,ChanYT.Asimpleapproachfortheestimationofcirculararccentreanditsradius[J].ComputerVision,Graphics,andImageProcessing, 1989, 45(3): 362-370.
[7] 张秀峰, 周凡. 一种短程无衍射激光图像定中算法[J]. 光学与光电技术, 2011, 9(4): 27-30.ZhangXiufeng,ZhouFan.Acenterfittingmethodfornon-diffractionbearnimagesatshortdistance[J].Optics&OptoelectronicTechnology, 2011, 9(4): 27-30. (inChinese)
[8] 蓝章礼, 闫果, 杨小帆, 等. 基于动态梯度的激光光斑中心定位算法[J]. 计算机科学, 2008, 35(8): 223-226.LanZhangli,YanGuo,YangXiaofan.Locationalgorithmofthelaserspotcenterbasedondynamicgradient[J].ComputerScience. 2008, 35(8): 223-226. (inChinese)
[9] 张奔牛, 万红明, 毛成林. 基于差分光斑中心算法的位移传感技术研究[J]. 传感技术学报, 2011, 24(2): 215-219.ZhangBenniu,WanHongming,MaoChenglin.Studyondisplacementsensorbasedondifferenceoperationspotcenterlocationalgorithm[J].ChineseJournalofSensorsandActuators, 2011, 24(2): 215-219. (inChinese)
[10] 黄一万. 基于ARM的激光标靶测量系统研究[D]. 武汉: 华中科技大学, 2012.
An Algorithm of Center Locating of Laser Spot Based on Intensity Threshold
GUO Yujing, WEI Li
(Dept. of Mechanical & Electrical Engineering, Tangshan University, Tangshan, 063000, China)
Center locating of laser spot is the key technology to laser displacement measurement. In order to improve the real-time performance of bridge deflection measuring system, this paper proposed a method of center locating of laser spot for laser image. The light intensity of laser spot is much larger than the intensity of other region. According to this characteristic, an intensity threshold is defined in order to get the binary image which only has laser spot. The principle is used to fit the center of laser spot that the midpoints of all parallel chords are in one straight line which is through the center of a circle. This method is simple, and has less calculation, so the measuring system using this method will be fast, and meets the demand of the real-time capacity. A good result has been achieved in measuring equipment.
laser image; spot center; locating algorithm; intensity threshold; bridge deflection measurement
1671-7449(2017)03-0223-04
2017-01-20
河北省高等学校科学技术研究项目(Z2015120)
郭玉静(1981-), 女, 讲师, 硕士生, 主要从事光纤传感与光电检测等研究.
TP212.1
A
10.3969/j.issn.1671-7449.2017.03.007
