天宝UX5无人机航摄系统在违章测量中的应用
2017-06-19王海,陈乐
王 海,陈 乐
(1. 广州市城市规划勘测设计研究院,广东 广州 510060; 2. 广州天派仪器科技有限公司,广东 广州 510030)
天宝测绘解决方案专栏
天宝UX5无人机航摄系统在违章测量中的应用
王 海1,陈 乐2
(1. 广州市城市规划勘测设计研究院,广东 广州 510060; 2. 广州天派仪器科技有限公司,广东 广州 510030)
改革开放以来,随着城市化进程的不断加快,城市建设向郊区不断蔓延,郊区农村进入快速城市化发展阶段。城市向郊区拓展形成的城市建设景观和郊区农村不断城市化形成的农村建设景观在地域上连接在一起, 出现了不少城中村,各种违法建设问题日益突出,影响了城市的整体面貌。因此,为了加强对城中村的土地利用规划管理,及时查处各种违章建筑,急需快速制作正射影像图。相较于传统的航空摄影测量,无人机具有作业成本低、周期短、安全性能好、机动性强及现势性强的特点,是卫星遥感、大飞机遥感的有力补充,在国内各项领域得到了广泛应用。
天宝UX5无人机系统由航测飞机、相机、地面控制站、发射架及跟踪器组成。航测飞机由机身、eBox和相机组成,eBox与电台天线相连接,主要起到与地面控制站通信的作用,地面控制站则用来控制UX5航测飞机(如图1所示)。

图1 UX5无人机
1 项目概况
本项目作业范围覆盖广州市番禺区大部,面积约345 km2。测区以平原为主,平均海拔10 m左右,并有部分丘陵地带,最高海拔为185 m。测区内建筑物密集,河网密布,交通便利。由于任务急,工期紧,采用天宝UX5飞机进行航拍。
1.1 技术路线
本项目首先利用天宝UX5无人机航摄系统获取影像和飞行文件,并进行像控点的布设及联测,获取像控点的坐标成果;然后根据像控点的坐标成果进行空三加密、影像正射纠正、自动拼接及整饰输出等过程;最后制作出正射影像图,技术流程如图2所示。
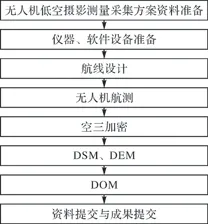
图2 无人机作业技术路线
1.2 项目关键技术
1.2.1 航线规划及像控点布设
由于项目要求制作0.1 m分辨率的数字正射影像,因此航线高度设置为383 m,航向重叠度为75%,旁边重叠度为70%。鉴于作业面积较大及起降场地的限制,将作业区域分为4块,共98个架次。航线规划如图3所示。

图3 航线规划示意图(部分)
由于项目要求提供地方坐标系成果,鉴于项目所测像控点约200个点,因此像控点测量采用事后控制,像控点的选择以斑马线的角点及球场的实线交点为主。像控点测完后,进行拍照,分别拍一张近景和远景,以方便后期像控点的匹配。
1.2.2 空三加密
外业完成后,内业数据处理采用UASMaster 软件,由于像片较多,因此采用分批处理方式,每块约4000张像片。为了能够得到空三加密的结果,按以下4个步骤进行:
(1) 定义新工程:将该坐标系统设置为成果要求输出的坐标系统,并设置相机对应的型号,然后导入像片及POS数据、像控点数据,最后生成航带,如果没有任何错误,就表明工程已经建好,可以进行下一步操作。
(2) 计算连接点:连接点平差提取有4种方法,分别为Full Resolution、Half Resolution、Half Resolution Approx 2D及Low Resolution,一般采用Half Resolution,该方法适用于大部分项目,处理速度快且精度较高。处理完成后,将会显示定向像片、地面控制点、航带与连接点等的相对位置。所有的像片都会在平差过程中使用,因此已经进行了外部定向的值将会被标记。最后检查所有的像片是否连接在一起,当确认所有的像片全部连接起来后,才可以进行控制点测量工作。
(3) 控制点测量:进入像片窗口进行控制点测量,默认情况下选择的是 Manual 模式。首先查找测量控制点在每张图片的粗略位置,然后选择合适的缩放比例进行精确刺点,一般选择清晰的像片进行刺点,直至所有的控制点测量完成。
(4) 相机校正与平差:控制点测量完成并确保无误后,采用 Weak平差方法来检查地面控制点测量。然后使用Extensive进行相机校正,校正完成后,检查是否有更多的连接点在平差中使用,以及地面控制点测量是否有提高,基于确定的定向和更好的相机校正,控制点将会投影到更多的像片中,因此可以增加测量。根据输出的结果决定平差精度是否足够,以及是否需要进一步的相机校正。
2 DOM生成
空三加密完成后,需要进行点云处理,再进行表面编辑,最后生成正射影像,具体步骤如下。
2.1 生成(DTM、DSM等)点云数据
DTM提取使用了两种主要的算法:最小二乘匹配和特征匹配。特征匹配法处理的速度很快,但精度只有 1/3 个像素。最小二乘匹配法主要用来处理细化点以获得更精确的点云,因此速度较慢。为加快处理速度,提取选项采用Smoother选项,在地面分辨率 2 级进行 DTM 生产,使用平衡最优,最终生成一个 30×GSD 的 2 级格网。
DSM 提取则采用CBM算法,CBM 是基于像素的匹配算法,不同于特征匹配算法与最小二乘匹配算法, 都是基于一个区域的匹配。DSM提取选项采用Spare 选项,虽然生成的点云密度较为稀疏,但是处理速度很快。
2.2 表面编辑
表面编辑主要是为了消除自动点云处理中的错误,这些错误将会影响正射镶嵌影像的生成。为了发现点云中错误,UAS Edit 中提供了显示选项,可以方便找出其中可能存在的问题。
2.3 正射影像的生成
正射影像生成直接采用点云的点,没有任何像片纠正过程,这是一种生成正射镶嵌的快速方法。出于性能的原因,该功能不作任何的像片平衡,但是几何质量比通过像片纠正的真正射镶嵌好得多(如图4所示)。

图4 数字正射影像(部分)
2.4 质量检查
将生成的数字正射影像和已有的1∶2000数字线划图进行对比,经检查,道路、河流、池塘等地物重合情况较好,影像清晰,反差适中,色彩及色调均匀,影像无模糊,满足项目要求。
3 结 语
(1) 相对于传统的航摄系统,无人机航拍技术具有作业成本低、周期短、安全性能好、机动性强的特点。本项目采用天宝UX5无人机航摄系统,虽然面积达到345 km2,但只花了3周时间就完成了外业飞行,总计飞了98个架次,极大地缩短了外业时间,而且没有发生任何重大安全事故。
(2) 这次大范围利用无人机航摄系统进行违章测量,从项目完成情况看,作业时间短,且成果质量满足委托方的要求。本项目的成功实施为无人机的进一步发展提供了新的平台,并提高了无人机航摄技术在应急测绘中的影响力。