电动助力转向系统仿真与控制策略研究
2017-06-19栗明邓召文
栗明,邓召文
(1. 潍柴动力股份有限公司,山东 潍坊 261001;2.汽车动力传动与电子控制湖北省重点实验室(湖北汽车工业学院),湖北 十堰 442002)
电动助力转向系统仿真与控制策略研究
栗明1,邓召文2
(1. 潍柴动力股份有限公司,山东 潍坊 261001;2.汽车动力传动与电子控制湖北省重点实验室(湖北汽车工业学院),湖北 十堰 442002)
通过对电动助力转向系统的研究,分别建立了折线型助力特性曲线、动力学仿真模型、包含基本助力、PID、PWM组成的EPS控制器模型,仿真分析了目标电流的跟踪特性、验证分析了助力特性,分析了EPS系统的转向轻便性和路感特性。仿真表明,实际电流对目标电流跟踪效果较好,转向轻便性得到改善,车速提高后,驾驶员获得了较强的路感,车速越高助力电动机提供的助力转矩越小,控制策略合理有效。
EPS;折线型;助力特性;PID;PWM
CLC NO.: U463.44+4 Document Code: A Article ID: 1671-7988 (2017)10-167-04
引论
电动助力转向系统(Electric Power Steering,缩写EPS)是一种直接依靠电机提供辅助扭矩的动力转向系统[1~3]。文献[4]分析了电动助力转向系统比例控制电动机电流的方法,设计了比例加微分控制电动机电流的方法;文献[5]对电动式动力转向系统的转向路感进行了量化分析,分析了影响路感的主要因素;文献[6]建立了EPS系统仿真模型,构建了电动助力转向系统的两层控制策略。本文建立了折线性助力特性曲线,建立了驾驶员、机械转向系、电动机、EPS控制器的运动学模型和Simulink仿真模型,仿真分析了目标电流的跟踪特性、验证分析了助力特性,并对助力转向系统的转向轻便性和路感特性进行了分析,验证了控制策略有效性。
1、EPS助力特性研究
1.1 助力特性研究
EPS系统的助力随汽车运动状况和受力状况(车速和方向盘力矩)变化而变化的规律称为助力特性。由于EPS助力大小与直流电机电流成比例,因此助力特性可以用电机电流与方向盘力矩、车速的变化关系曲线来表示。助力特性可以协调路感和转向轻便性之间的关系,低速时轻便舒适,高速时助力减少。
1.2 折线型助力特性
直线型、曲线型和折线型助力特性是EPS系统常用的典型曲线。直线型助力特性具有最为简单的特点,在实际中容易调整;曲线型助力特性复杂,不易调整;折线型助力特性较为折中,其助力与转向盘力矩之间具有分段线性关系。通过研究分析,本文仿真采用的折线型助力特性如图1所示。

图1 助力特性图Fig1 Assist characteristic curve
1.3 电动助力转向控制策略
EPS控制策略主要由助力控制、回正控制和主动阻尼控制组成。由于电动机转矩的大小与电动机电流成正比关系,助力控制是根据传感器测得的车速信号和转向盘转矩信号,查找相应的助力曲线图,确定电动机的目标助力电流,通过控制器控制电动机的电枢电流实现助力转矩的控制。
1.3.1 PID控制理论
本文选用PID控制方法,用试凑法来确定PID的参数。由于PID控制具有结构简单、工作可靠、稳定性好、调整方便等优点,满足EPS的控制要求。电流环PID控制的系统原理,通过将目标电流值与测量的实际电流值取偏差,然后按比例、积分、微分的关系进行计算,通过直流脉宽(PWM)调节得到电动机的控制电压,将结果作为控制输出给直流电动机实现电流的闭环控制。
1.3.2 助力控制方式
助力控制是EPS系统的基本控制策略,汽车在转向时(不包括汽车回正),为了使驾驶员的操纵力减小,通过减速机构输出助力转矩的一种控制模式。
2、EPS建模
2.2 EPS系统结构
图2为转向轴助力式EPS的结构简图。

图2 EPS结构简图Fig2 Schematic diagram of EPS
转向盘转矩大小和方向的检测是通过转向盘上的转矩传感器实现的。控制器的助力控制是根据转矩传感器信号进行的,再根据车速信号大小进行助力修正,并根据助力电流完成电流的闭环控制。
2.3 EPS模型建立
2.3.1 驾驶员建模
将转向系统的转矩输入变成转角输入是通过驾驶员模型实现的[7]:

式中:Kp 为比例系数,d 为微分系数,Ki 为积分系数,tL 为延迟时间,仿真参数分别调整为:Kp=0.5,Kd=0.052,Ki=0.52。
2.3.3 控制器建模
采用上下两层控制策略,上层控制策略是基本助力控制,下层控制策略采用PID和PWM控制方式对目标电流进行精确跟踪控制。转向盘转矩传感器和车速传感器信号决定基本助力电流I(或助力转矩)大小和方向。PWM模块相当于一个延迟环节,其传递函数中T为PWM开关周期,一般取1/20000s[8]。由此得到控制策略框图如图3。

图3 控制策略框图Fig3 The control strategy block diagram
综上分析,结合设计的控制策略,得到控制器模型如图4。
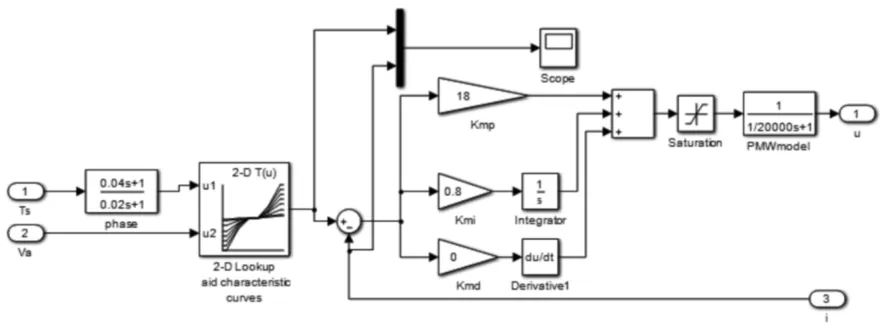
图4 控制器模型Fig4 The controller model
2.4 EPS仿真模型的建立
根据建好的转向盘模型、电动机模型、转向拉杆模型、控制器模型和驾驶员模型等,以正弦波与方波模拟驾驶员输入,得到的电动助力转向系统simulink仿真模型如图5。
图5 电动助力转向系统simulink仿真模型Fig5 EPS system Simulink model
3、EPS的仿真分析
3.1 PID 控制器对助力电流的跟踪控制
调节PID控制器,当3个参数调节到Kmp = 18,Kmi = 0. 8,Kmd= 0时,在车速30km/ h时,转向盘输入为正弦信号时,电动机实际电流和目标电流的跟踪控制效果如图6所示。对比发现,实际电流与目标电流具有相同的变化趋势及相同的最大及最小值,实际电流对目标电流的跟踪效果较好。
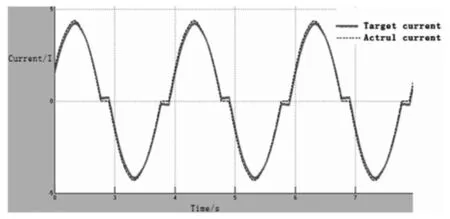
图 6 PID 控制器的控制效果Fig6 Control effect of PID controller
3.2 EPS助力特性验证分析

图7 转向盘转角输入Fig7 Steering wheel angle input
为了对EPS系统的助力特性进行验证,对转向盘进行了如图7所示的转角输入,仿真分析在车速为20km/h和60kxn/h时电动机转矩的响应特性,仿真结果如图8所示,当转向盘把持力相等时,助力电动机提供的助力转矩随车速变大而变小,仿真结果证明了折线性助力特性曲线对EPS控制系统的有效性。

图8 电动机转矩响应对比图Fig8 Motor torque response characteristic
3.3 EPS转向轻便性及路感分析
进行原地不加助力、加电动助力转向仿真研究的目的是为了验证所设计EPS的转向轻便性和路感特性。不加助力和加助力转向对比仿真结果如图9所示,不加助力和加助力转向对比仿真结果表明,无EPS助力时的原地转向时的转向盘力矩一转向盘转角特性曲线,此时完全依靠转向盘转矩克服转向阻力进行转向,转向盘最大力矩为3.9 N.m,而有EPS助力时的转向工况,此时电动机帮助驾驶员克服了部分转向阻力,其转向盘最大力矩为3 N.m。证明所设计的EPS有较好的轻便性。仿真表明:(不加助力)原地转向沉重;(加助力)转向盘上的转矩减少,转向轻便性改善。
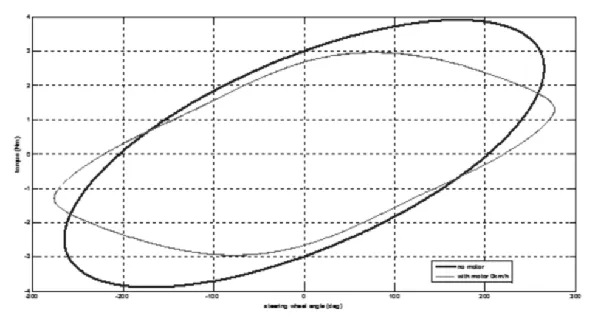
图9 不加助力和加助力转向对比仿真结果Fig9 characteristic curve of steering wheel angletorque without EPS and with EPS
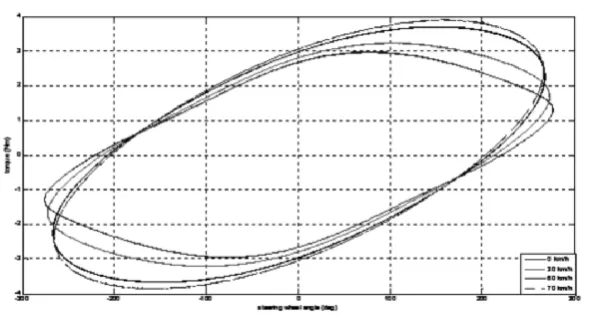
图10 转向轻便性和路感仿真结果Fig10 steering portability and road feeling
同时又分别进行了原地0 km/h(加助力)、车速30 km/h(加助力)、车速60 km/h(加助力)、车速70 km/(加助力)h时助力转向仿真,各种速度下转向盘转角与转向盘扭矩对比仿真曲线图10所示。装有电动助力转向系统的汽车在行驶过程中转向,在一定范围里助力转矩与车速成反比例关系,随着车速的升高,助力转矩要相应减小,确保操纵稳定性。当驾驶员停车或者低速需要转向时,助力电机克服大的阻力矩,使转向轻便性。从原地转向到低速转向、再从低速转向到高速转向时,最后要平稳过渡,避免助力转矩有跳跃感。随车速提高,转向盘上的转矩逐渐平稳增加,说明车速提高后,驾驶员获得了较强的路感,提高了汽车高速行驶的操纵稳定性。
4、结论
根据所建模型,仿真分析了目标电流的跟踪特性、助力转向系统的转向轻便性和路感特性,验证分析了助力特性,实际电流对目标电流跟踪效果较好,加助力时,转向轻便性提高,车速提高后,驾驶员获得了较强的路感,车速越高助力电动机提供的助力转矩越小,证明了折线性助力特性曲线对EPS控制系统的有效性。
[1] Masahiko Kurishige, Kouji Fukusumi, Noriyuki Inoue, et al. A new electric current control strategy for EPS motors[C]. SAE Paper 2001-01-0484,2001.
[2] Roy MccCann. Variable effort steering for vehicle stability enhancement using an electric power steering system[C].SAE Paper 2000-01-0817, 2000.
[3] Toshio Kohno, Shinji Takeuchi, Minekazu Momiyama, et al. Development of electric power steering(EPS) system with H∞control[C]. SAE Paper 2000-01-0813, 2000.
[4] 牟春燕,王昕彦,周华维.电动助力转向系统(EPS)电动机电流控制的研究[J].拖拉机与农用运输车,2009(12).
[5] 叶耿,杨家军,刘照,等.汽车电动式动力转向系统转向路感研究[J].华中科技大学学报(自然科学版),2002(2).
[6] 申荣卫,林逸,台晓虹,等.电动助力转向系统建模与补偿控制策略[J].农业机械学报,2007(7).
[7] Masato Abe. The movement and manipulation of the automobile [M].Chen Xinbo. Beijing: Mechanical Industry Press, 1998
[8] 何字满. 基于MATLAB/Simulink的电动助力转向系统控制算法仿真研究[J].传动技术,2011,4.
Research on Control Strategy and Simulation of Electric Power Steering System
Li Ming1, Deng Zhaowen2
(1. Weichai Power Co., Ltd., Shandong Weifang 261001; 2.Key Laboratory of Automotive Power Train and Electronics (Hubei University of Automotive Technology), Hubei Shiyan 442002)
In this paper,the assist characteristic curve with fold linear control for EPS were built,the EPS dynamic mathematical models were established. On the basis of the analysis of the mathematical model for each departments,the whole simulation model were constructed, The EPS control model including the assist characteristic curve、PID and PWM control method.The tracking performance characteristics of the actual current to the target current, verifying and analyzing the assist characteristic and the steering portability and road feeling characteristics for EPS were accomplished and analyzed by simulation. The results show that the tracking performance is effective.The steering portability was enhanced correspondingly with EPS,the driver has a stronger road feeling with the speed increasing. Under the same steering wheel power,the higher the vehicle speed, the lower torque of the power assisted motor was. In short, it was proved that the control strategies is effective.
EPS; assist control characteristic; PID; PWM; simulation
U463.44+4
A
1671-7988 (2017)10-167-04
10.16638/j.cnki.1671-7988.2017.10.058
栗明(1978-),男,工程师,就职于潍柴动力股份有限公司。研究方向:汽车电子控制。
项目编号:国家自然基金项目(51375151);湖北省自然科学基金重点项目(2013CFA134);汽车动力传动与电子控制湖北省重点实验室创新基金项目(2015XTZX0423)。
