基于模糊自适应的永磁同步电机矢量控制系统
2017-06-15王贤会,李宝营,冯荻
王 贤 会, 李 宝 营, 冯 荻
( 1.大连工业大学 信息科学与工程学院, 辽宁 大连 116034;2.大连理工大学 机械工程学院, 辽宁 大连 116024 )
基于模糊自适应的永磁同步电机矢量控制系统
王 贤 会1, 李 宝 营1, 冯 荻2
( 1.大连工业大学 信息科学与工程学院, 辽宁 大连 116034;2.大连理工大学 机械工程学院, 辽宁 大连 116024 )
提出了一种基于模糊自适应的永磁同步电机(PMSM)矢量控制系统的速度控制器的方案。模糊自适应控制器由模糊逻辑控制器和传统的PI控制器组成,采用模糊自适应控制器的输出对传统PI参数进行实时调整,使其具有模糊逻辑在处理不确定信息方面的能力和PI控制在线性系统中的良好性能。Matlab的仿真结果表明,采用模糊自适应建立的永磁同步电机的速度控制器,在系统参数发生变化或者受到外部扰动的情况下,PMSM矢量控制系统具有较好的动态响应特性。
永磁同步电机;模糊自适应控制器;比例积分控制器
0 引 言
交流电机广泛应用于工业和家庭,如电动汽车、工业机器人、空调、洗衣机等。交流电机主要分两大类:异步交流电机和同步交流电机。异步交流电机因其结构简单、鲁棒性良好和造价低等优点,占据70%的电机市场份额[1-2],永磁同步电机由于其高效率、低维修成本、高能量密度等特点[3]正逐步抢占市场份额。然而,永磁同步电机控制系统是一个非线性多变量系统,具有时变、非线性、强耦合等特征[4],其动态特性易受电机参数变化和扰动干扰。传统给定PI参数的方法难以满足这种要求,电机运行过程中电机发生参数变化或者被外部干扰,使得预先给定的PI参数难以跟踪上新的工况[5]。将模糊控制理论和传统PI控制相结合[6-7],运用现代控制理论在线辨识对象特征参数,可以使PMSM控制系统的性能保持在较好的范围。仿真结果表明,该控制方案可以使系统具有较好的动态性能和鲁棒性。
1 永磁同步电机矢量控制模型
1.1 永磁同步电机的数学模型
通过引入坐标变换,将三相定子坐标系,变换成静止的两相平面直角坐标系,然后将转子磁体磁极轴线规定为d轴,在其垂直的方向且电角度超前d轴(以转子旋转方向为正方向)确定一个q轴,即以d、q轴建立的直角坐标系与转子同步旋转[8]。dq旋转坐标系中的永磁同步电机定子电压方程为
ud=Rsid+DΨd-ωΨq
uq=Rsiq+DΨq-ωΨd
(1)
式(1)中:ud,uq为d/q轴的电压分量;Rs为定子电阻;id,iq为d/q轴的电流分量;Ψd,Ψq为定子在d/q轴上的磁链;ω为PMSM的电角频率;d为微分算子。
假设PMSM产生的是正弦分布磁场且磁路不饱和,忽略磁滞和涡流损耗等影响[9],定子磁链方程为
Ψd=Ldid+Ψr
Ψq=Lqiq
(2)
式(2)中:Ld,Lq为d/q轴的电感分量;Ψr为转子磁体在定子上的耦合磁链。
永磁同步电动机的电磁转矩方程为:
Te=1.5P(Ψdiq-Ψqid)
(3)
式(3)中:Te为电磁转矩;P为磁极对数。
永磁同步电机的机械运动平衡方程为

(4)
式(4)中:TL为负载转矩;J为转动惯量;B为黏性摩擦系数。
把公式(2)代入公式(3)得到:
Te=1.5Piq(Ψr+(Ld-Lq)id)
(5)
1.2 永磁同步电机的矢量控制
磁场定向矢量控制技术[10](FOC)的核心是在dq旋转坐标系中对激励电流id和转矩电流iq解耦后分别控制,并且结合传统的PI线性控制器,系统表现出较好的线性特性。激励电流id保持为零,利用这种控制策略,可得到电磁转矩与定子电流的q轴分量成正比。由公式(5)可推导出公式(6),即永磁同步电机的转矩可分为两个分量:一是转子产生的耦合磁链Ψr与定子电流转矩的分量iq作用后产生的转矩分量Te1;二是永磁体内嵌结构,让磁路呈不对称而产生的磁阻转矩Te2。
Te1=1.5PiqΨr
Te2=1.5P(Ld-Lq)idiq
(6)
控制系统的逆变器控制采用的是空间矢量脉宽调制(SVPWM)控制技术,电压空间矢量采用的是两电平电压型逆变器输出,空间矢量如图1所示。其控制策略是根据电机的运行状态得到的一个电压空间矢量后,通过控制电压型逆变器使其在一个控制周期内输出的电压空间矢量对时间的积分与电压空间矢量和控制周期的乘积相等[11-12]。
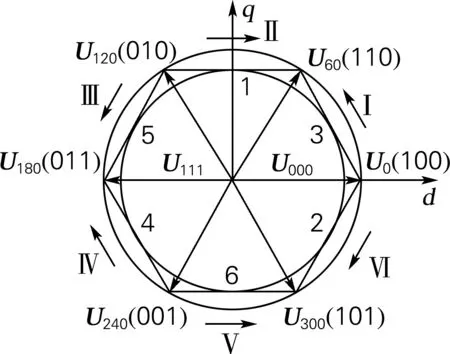
图1 两电平电压空间矢量图
2 模糊自适应PI控制器的结构
2.1 模糊自适应PI控制原理
模糊自适应PI控制器以误差e和误差变化率ec作为输入,以Δkp、Δki作为输出[13-14]。利用模糊理论把控制规则用模糊集描述,把所确定的模糊控制规则及相关信息存入计算机的知识库中,再次计算机根据控制系统的响应情况,运用模糊推理对PI参数进行实时调整,以达到最佳的响应,使被控对象具有良好的动、静性能,其结构图如图2所示。

图2 模糊自适应PI控制器结构
2.2 PMSM模糊自适应控制器的设计
模糊自适应控制器的误差(e)、误差变化率(ec)和Δkp的论域都是[-3,3],Δki的是[-6,6]。输入、输出的量化因子根据实际额定转速,稳定误差的范围而设定[15-16],确保动态响应的变化充分体现在模糊控制器的输入输出上。通过限幅控制使超过论域范围的值,按照论域的界限处理。编制模糊规则表[17],如表1~2所示。

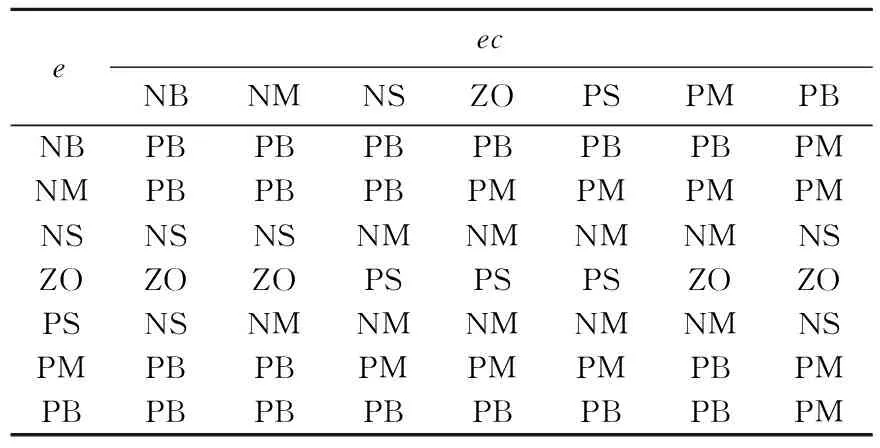
表1 Δkp模糊逻辑规则表
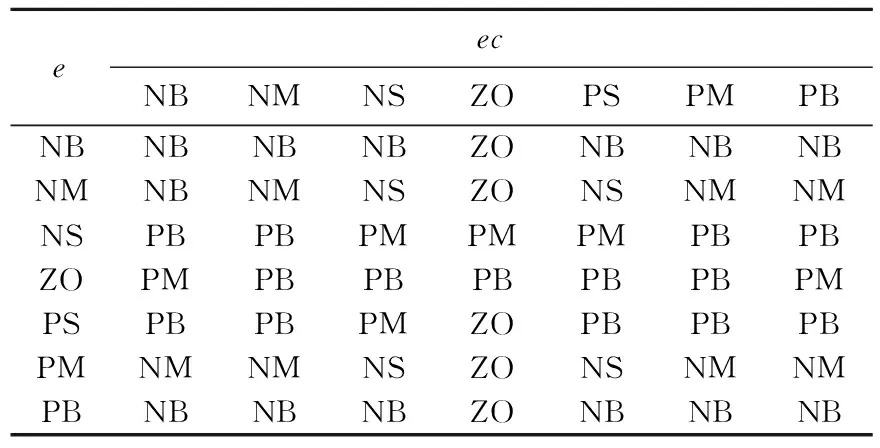
表2 Δki模糊逻辑规则表
3 Matlab仿真
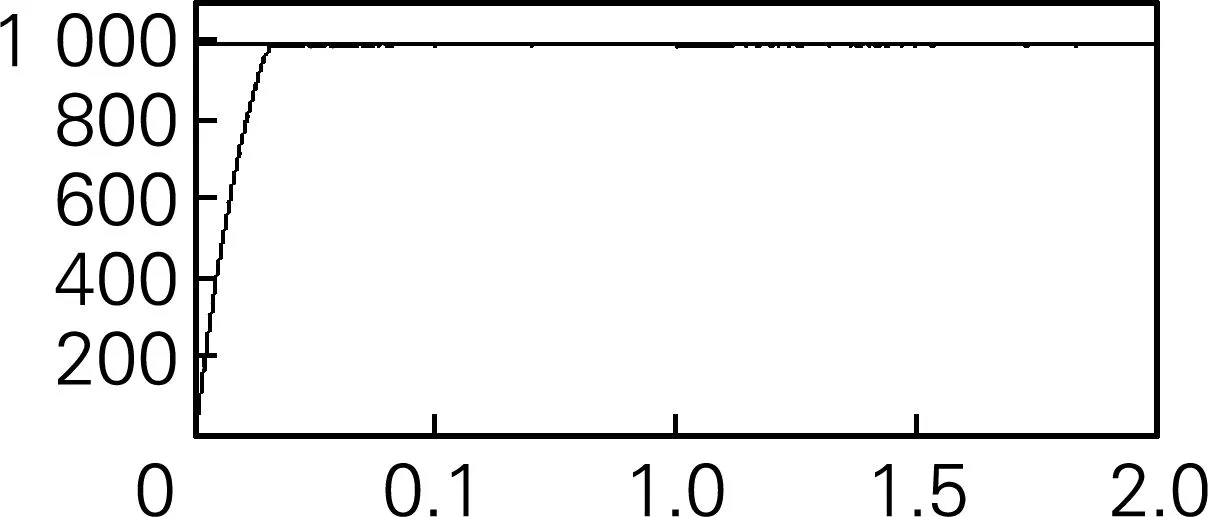
建立如图3所示的模糊自适应的永磁同步电机矢量控制系统的Simulink仿真模型。永磁同步电机参数:Rs=2.875 Ω,Ld=Lq=0.008 5 mH,Ψr=0.175 Wb,P=4,黏性摩擦系数B=0.002 N·m·s/rad。仿真实验条件为
条件1:J=0.013 km·m2,TL=0 N·m
n*=1 000 r/min
条件2:J=0.013 km·m2,TL=4.5 N·m
n*=1 000 r/min
条件3:J=0.045 km·m2,TL=1 N·m,
n*=1 000 r/min
条件4:J=0.013 km·m2,TL=1 N·m
条件5:J=0.013 km·m2,TL=0.5 N·m
TL1=4.5 N·m,n*=1 000 r/min

4 结 论
因为PMSM控制系统具有非线性、时变参数的特性,使得固定PI参数的控制方法难以满足该控制系统的运行要求,而采用模糊自适应的控制方法,通过模糊逻辑和模糊推理的方法,实时调整PMSM控制系统的参数,使其跟随系统的动态变化,继而使被控对象体现出较好的鲁棒性。仿真实验表明,以模糊自适应控制和传统PI控制结合的速度控制器,在速度给定、负载转矩和转动惯量的变化中,具有较快的跟踪速度和较高的精度。因此提供的模糊自适应PMSM矢量控制系统能够保证,当电机某些参数发生变化或者受到外部干扰时,具备较理想的动态特性和鲁棒性。

图4 基于模糊自适应的永磁同步电机矢量控制系统仿真图
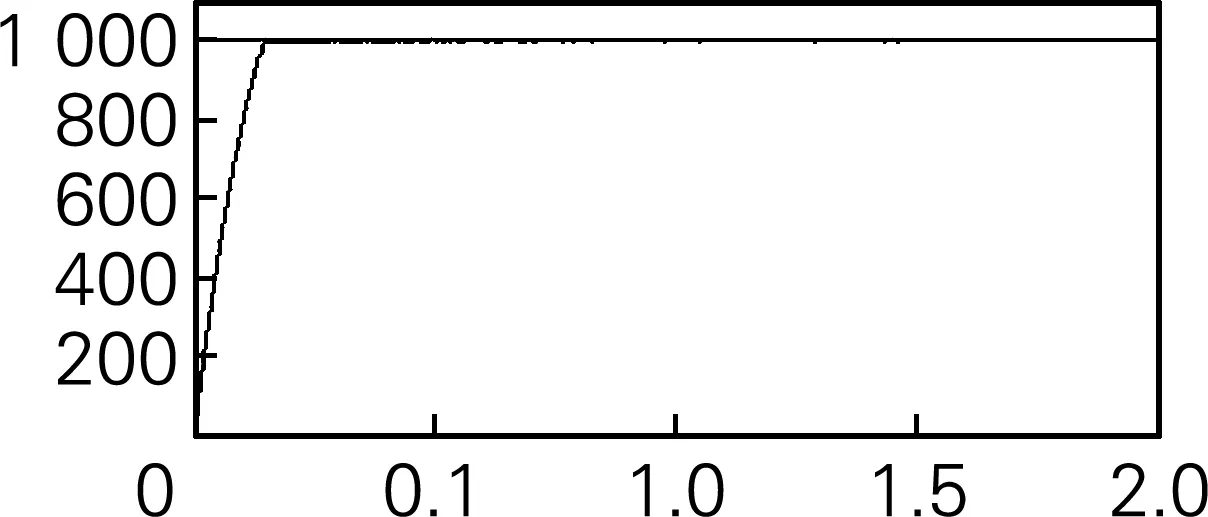
(a) 在条件1下的仿真结果曲线

(b) 在条件3下的仿真结果曲线

(c) 在条件5下的仿真结果曲线

(d) 在条件2下的仿真结果曲线
(e) 在条件4下的仿真结果曲线

(f) 在条件5下的仿真局部放大曲线
图4 仿真结果图
Fig.4 Simulation results
[1] 吴慰,黄烜,刘会河.三相交流异步电机控制系统仿真[J].计算技术与自动化,2011,30(4):68-72.
[2] SIM H W, LEE J S, LEE K B. On-line parameter estimation of interior permanent magnet synchronous motor using an extended kalman filter[J]. Journal of Electrical Engineering and Technology, 2014, 9(2): 600-608.
[3] JUNG J W, LEU V Q, DO T D. Adaptive PID speed control design for permanent magnet synchronous motor drives[J]. IEEE Transactions on Power Electronics, 2015, 30(2): 900-908.
[4] 孟芳芳,邵雪卷.永磁同步电机的自调整灰色预测内模控制[J].电气自动化,2015,37(1):14-20.
[5] RAHMAN M A, HOQUE M A. On-line adaptive artificial neural network based vector control of permanent magnet synchronous motor[J]. IEEE Transactions on Energy Conversion, 1998, 13(4): 311-318.
[6] 王永富,柴天佑.自适应模糊控制理论的研究综述[J].控制工程,2006,13(3):193-198.
[7] 周洵,文小玲,邹艳华.参数自整定模糊PI控制器设计与仿真[J].电子信息与计算机技术2015,555(1):1-3.
[8] 袁登科,陶生桂.交流永磁电机变频调速系统[M].北京:机械工业出版社,2011.
[9] 曾祥华.基于TMS320F2812的永磁同步电动机伺服系统设计[J].电机控制与应用,2010,37(2):5-7.
[10] 陈构宜.同步电动机气隙磁场定向矢量控制技术的研究[D].武汉:华中科技大学,2011.
[11] 田亚菲,何继爱,黄智武.电压空间矢量脉宽调制(SVPWM)算法仿真实现及分析[J].电力系统及其自动化学报,2004,16(4):68-71.
[12] 李传海,李峰,曲继圣,等.空间矢量脉宽调制(SVPWM)技术特点及其优化方法[J].山东大学学报(工学版),2005,35(2):27-31.
[13] 刘金琨.先进PID控制Matlab仿真[M].2版.北京:电子工业出版社,2004.
[14] 李聪,尹文庆,冯学斌,等.基于模糊自适应PI控制的无刷直流电机无级调速系统[J].机电工程,2012,29(1):49-52.
[15] 王川川,赵锦成,齐晓慧.模糊控制器设计中量化因子、比例因子的选择[J].四川兵工学报,2009,30(1):61-63.
[16] 屈丹.基于Matlab的模糊控制参数自寻优设计与仿真[J].光电技术应用,2005,20(2):67-70.
[17] 鲁雄文.模糊PID控制系统的设计与研究[J].现代电子技术,2014,37(24):146-149.
Self-adaptive fuzzy controller of vector controlled permanent magnet synchronous motor
WANG Xianhui1, LI Baoying1, FENG Di2
( 1.School of Information Science and Engineering, Dalian Polytechnic University, Dalian 116034, China;2.School of Mechanical Engineering, Dalian University of Technology, Dalian 116024, China )
The implementation of self-adaptive fuzzy controller for speed control of a permanent magnet synchronous motor (PMSM) was proposed. The controller was consists of a fuzzy logic controller term and a traditional PI control term. The output of the fuzzy adaptive controller was used to adjust the traditional PI parameters in real time, which made it have the ability of fuzzy logic to deal with the uncertain information and good performance of the PI control in the linear system. The simulation results of Matlab showed that the dynamic characteristics of the proposed controller was reliable under the condition of parameter variations and external disturbance.
permanent magnet synchronous motor; self-adaptive fuzzy controller; PI controller
2015-09-08.
王贤会(1989-),男,硕士研究生;通信作者:李宝营(1965-),男,副教授.
TM341
A
1674-1404(2017)03-0227-04
王贤会,李宝营,冯荻.基于模糊自适应的永磁同步电机矢量控制系统[J].大连工业大学学报,2017,36(3):227-230.
WANG Xianhui, LI Baoying, FENG Di. Self-adaptive fuzzy controller of vector controlled permanent magnet synchronous motor[J]. Journal of Dalian Polytechnic University, 2017, 36(3): 227-230.
