基于CC430的急转弯会车提示预警系统*
2017-06-15胡海兵汪国庆崔世林杨建德
陶 刚,胡海兵,汪国庆,崔世林,杨建德
(1.安徽科力信息产业有限责任公司,安徽 合肥 230009;2.合肥工业大学,安徽 合肥 230009)
基于CC430的急转弯会车提示预警系统*
陶 刚1,胡海兵2,汪国庆2,崔世林2,杨建德2
(1.安徽科力信息产业有限责任公司,安徽 合肥 230009;2.合肥工业大学,安徽 合肥 230009)
针对道路中急转弯处因盲区会车的信息采集、信息反馈、信息处理失误而引发交通事故的问题,设计了新型实用的急转弯会车提示预警系统。以TI MSP430MCU和CC1101低功耗多通道无线射频内核的CC430F5137芯片为控制核心,由地磁传感器检测采集车辆信息,系统中的两块大面积电子显示屏给出信息告知预警,前方车况及时反馈到来向和去向的驾驶人员。道路实地模拟测试表明该系统对于车辆在弯道处的良好检测率,弥补了传统警示标志的不足。急转弯盲区道路安全解决方案在智能化交通上具有广阔的应用前景。
CC430;低功耗;弯道;安全驾驶
0 引言
随着社会对文明驾驶和交通安全的日益重视,人们不断提高车辆驾驶的安全性和智能交通设施建设。其中我国山区公路地形复杂,路窄、弯道多、坡陡。车辆遇到弯道时,驾驶者对前方交通状况缺乏足够的了解,短暂的应变时间会使司机发生误判从而导致交通事故。急转弯地形导致事故的问题亟待解决。
交通领域国内外专家学者针对这一问题主要研究出两种方法。第一种是将弯道地形作为单独研究单元,对弯道进行线形设计与优化设计,公路弯道道路线形与交通特性分析显然是治标不治本的途径。第二种就是科学改善道路限速和交通安全设施,增强驾驶人安全驾驶意识及规范车辆上路合格检测管理。虽然近些年我国交通管理部门和路政机关在弯道地形区域预先设立了多种多样的提示标语与警示标志,但避免交通事故的效果还是不够理想[1-2]。
针对急转弯、陡坡弯道等不利地形的交通安全问题,迫切需要采用智能化交通系统等先进技术对道路交通进行即时动态的侦测、警告、引导和管制,实现道路交通安全有序、保障驾驶人生命和财产安全的目标。为此,本文设计了一种急转弯处会车的智能提示预警系统,拟解决急转弯盲区道路会车的问题,增强急转弯地形安全会车的可靠性,减少事故发生的可能性。
1 急转弯会车预警系统的设计方案
1.1 系统设计的主要构成部分
急转弯会车提示预警系统主要有两个部分,在急转、弯处一定距离的前后位置分别设置两个地磁传感器,电子显示屏设置在弯道的入口处和出口处。整体系统平面图如图1所示,包括一对内车道的地磁传感器检测器、来向车辆、去向车辆以及一对电子显示屏。内车道上安装有所述车辆地磁检测器2,地磁检测器2位于去向车辆的前方,地磁检测器2的另一侧是电子显示屏2。在急转弯道路的另一个方向,来向车辆在外车道驶来,此时来向车辆正处于去向车辆的盲区。急转弯会车提示预警系统给出安全会车的解决方案:来向车辆的前方路面上设置有地磁检测器1,地磁检测器1的另一侧是电子显示屏1,电子显示屏1上面显示去向车辆信息,电子显示屏2上面显示来向车辆信息。电子显示屏提前告知驾驶人员前方车况,提醒驾驶人员急转弯道后方的车辆信息,便于驾驶人员提前减速,保证弯道内驾驶的安全性。
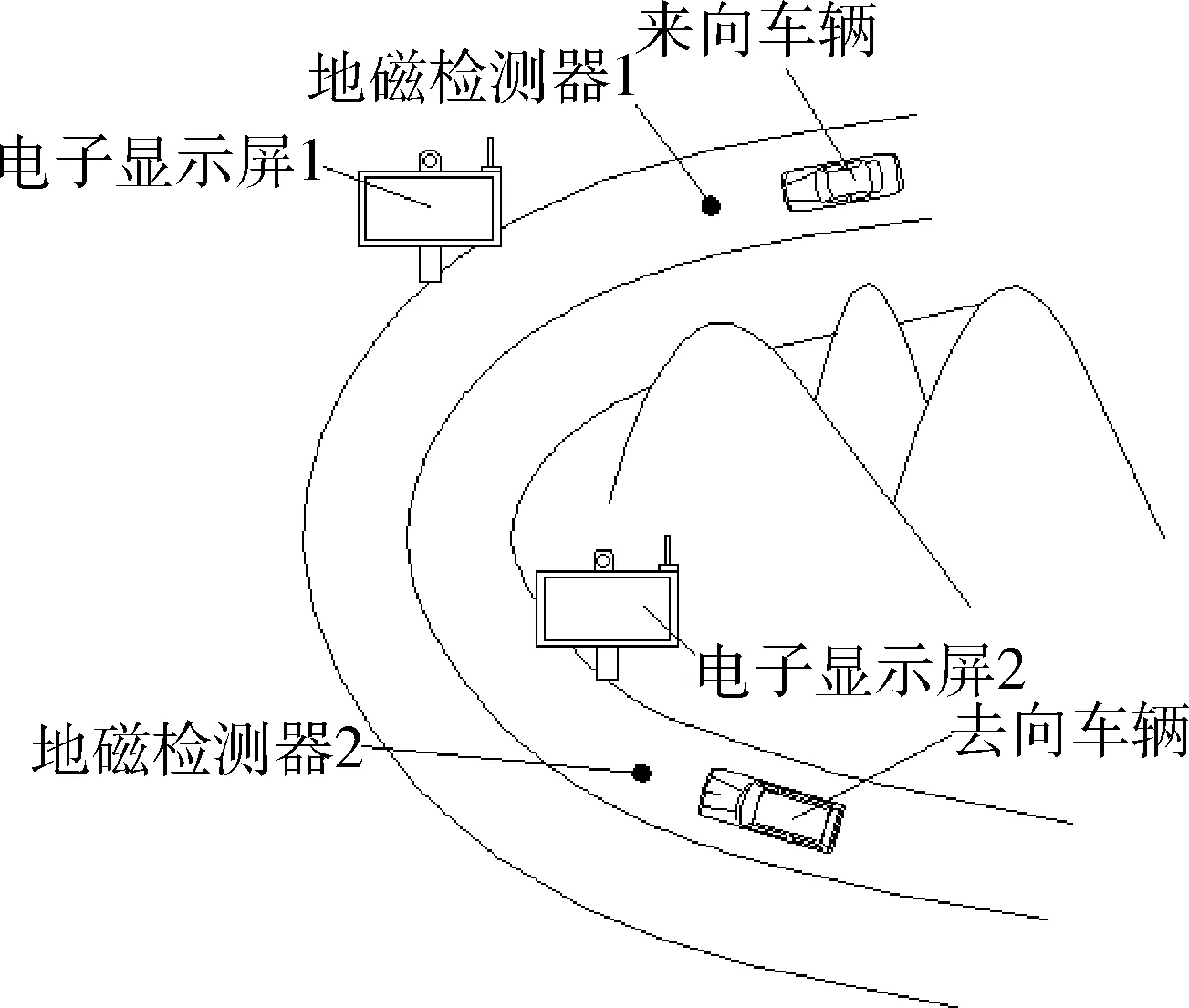
图1 系统平面图
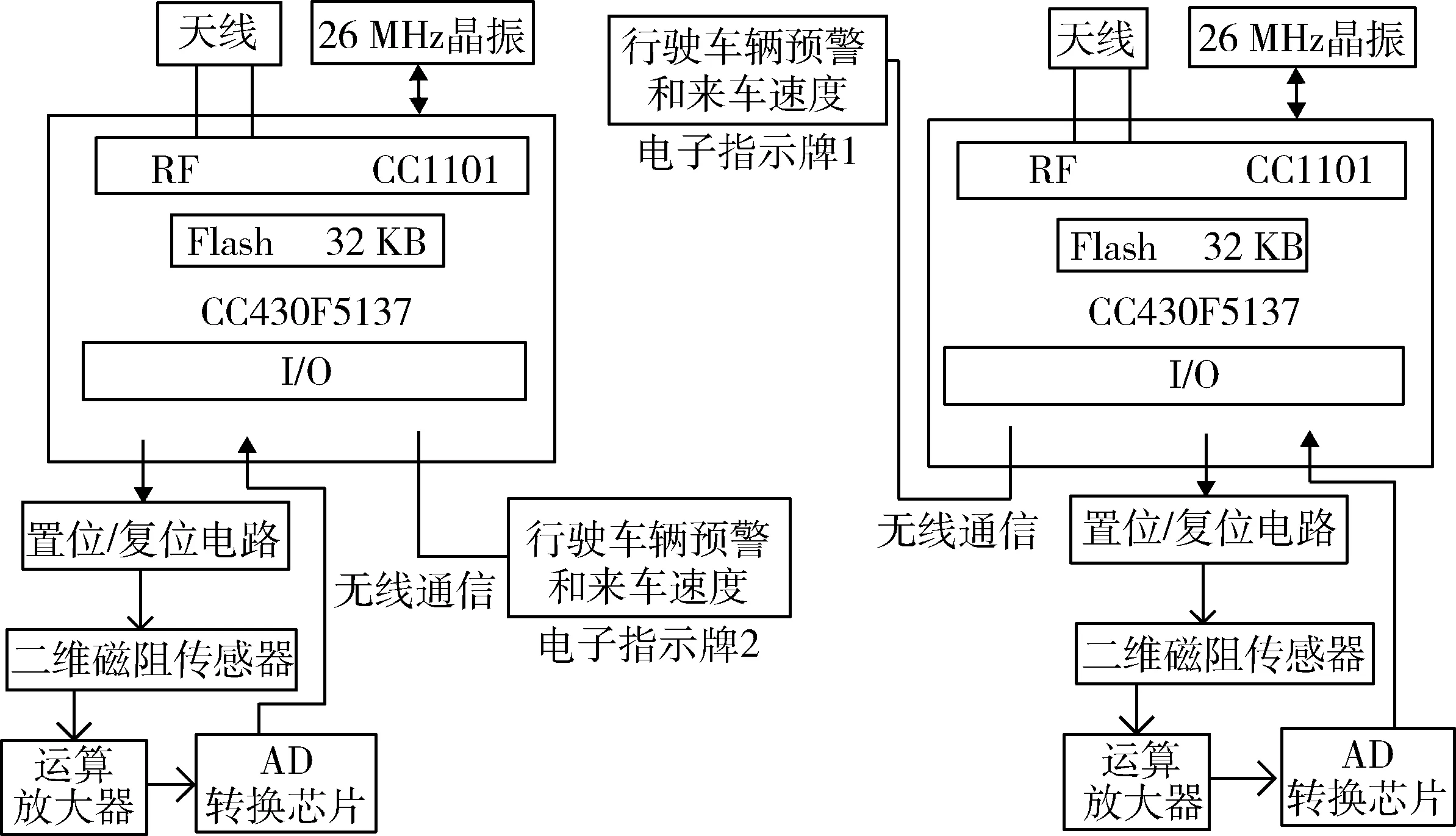
图2 系统整体架构图
1.2 系统设计的可行性对比分析
与当前普及的广角镜相比,弯道会车预警系统不受视野角度的限制,能够适应各类复杂路况,对于夜间行车,大雾阴雨天气的弯道会车有着明显的优势,可根据路况需要合理配置传感器及显示模块的方位,使得驾驶员能够提早接收前方车况信息。若有超速或低速拐弯的车辆驶来时,驾驶员也能提前获知弯道盲区的来车情况,从而及时做出减速或规避等避险措施。
地磁传感器检测距离范围覆盖整个路面宽度,传感器提前检测到车辆,能够及时在系统显示屏上预告,从而使司机能够在进入弯道会车之前就正确得到来车信息提示。在弯道入口处,由于驶入弯道和驶出弯道的汽车经过两个地磁传感器,引起两个地磁传感器扰动信号变化,从而单片机CC430F5137(CC430)可识别出车辆驶入和驶出弯道时的速度。通过单片机内部的计时器,检测车辆引起扰动所用时间,从而计算车辆速度。显示模块实时发布车辆来向和车速,使驾驶人员依据电子屏反馈信息及时减速或停车避让,避免会车失控的事故发生。
2 系统的硬件模块和软件程序设计
系统的硬件设计主要用到TI 的CC430F5137芯片。芯片内部以MSP430MCU为控制核心,设置ADC采集地磁传感器检测模块数据,基于CC1101低功耗多通道无线射频内核,通过外设天线与对应的电子液晶显示屏无线通信,其中点对点通信由外设拨码开关设定地址配对建立连接,系统整体架构图如图2。
2.1 CC430MCU主控模块与RF无线通信模块
CC430MCU主控模块是车辆信息实时采集的硬件基础。系统主控电路原理图如图3所示。MCU具有超低功耗,具有高达25 MHz的峰值执行性能,主动模式功耗仅仅为160 μA/MHz,待机模式(LPM3 RTC模式):2 μA,关闭模式(LPM4 RAM保留):1 μA,处理器8 MHz仅1.3 mA[3]。超低功耗的运行模式可增加地磁检测器的电源的使用寿命,埋于地下的地磁检测器暗盒里可以用独立包装的电池作为采集系统的电源供给。
CC430芯片外部振荡电路使用26 MHz晶振,程序设计通过读取AD的模块数值用一个定时器外部中断控制。程序调试的下载端口采用最常用的标准调试接口JTAG接口。射频收发器CC1101采用基于433 MHz 的载波频率,配以合适的阻抗电路。
2.2 基于地磁传感器的车辆检测器模块
放有地磁检测器附近区域的地球磁场可以看成是均匀磁场空间,车辆一般都有铁磁体金属物质,均匀磁场就会发生扰动,地磁检测器会对磁场产生的扰动进行采集和分析。大量科学实验表明,这种扰动对于磁阻传感器监测是很敏感的,由此可以判断车辆的存在,更加精确的磁场检测甚至可以测出车辆引起扰动的时间[4]。实验测试运动小车对磁场的扰动,发现汽车经过地磁传感器上方时,磁场发生扰动,具体表现为地磁场强度在Z轴方向明显发生一定幅度的变化。车辆驶离地磁检测器附近区域,地球磁场会恢复之前状态。通过磁场强度的扰动变化,就可以确定车位有无停车。单一的地磁检测会有一定错误和遗漏,系统可以采用增加光敏传感器、图像识别等其他辅助检测手段,提高车速检测的准确性,该文不再赘述。
会车预警系统地磁检测器主要由飞思卡尔公司的三轴磁阻信号传感器MAG3110组成。内置高性能锂亚硫酰氯电池供电,主控芯片采用低功耗运行方式,电池为整个地磁采集功能电路板供电的工作寿命达3~5年。地磁车辆检测器固定于路口中间区域,采用高强度ABS和PC材料注塑成型,有防水、抗酸碱腐蚀、抗冲撞功能[5]。以芯片CC430为主控电路水平放置于距离地磁检测功能印制电路板一侧0.15 m的地方,以防附近电路板对地磁测量的干扰。地磁传感器外围电路原理图如图4所示[6]。
2.3 系统软件程序设计与优化
系统低功耗器件的硬件设计最大效率地利用电池的能量,延长地磁检测器和主控开发板的使用寿命。与此同时,灵活的电源管理软件程序控制CC430单片机以及高效的纠错矫正能力十分重要。
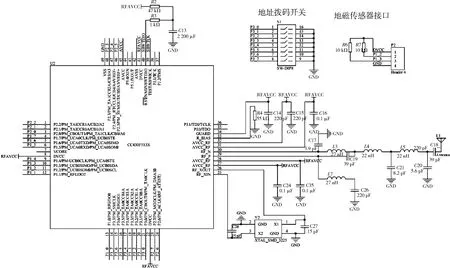
图3 系统主控电路原理图
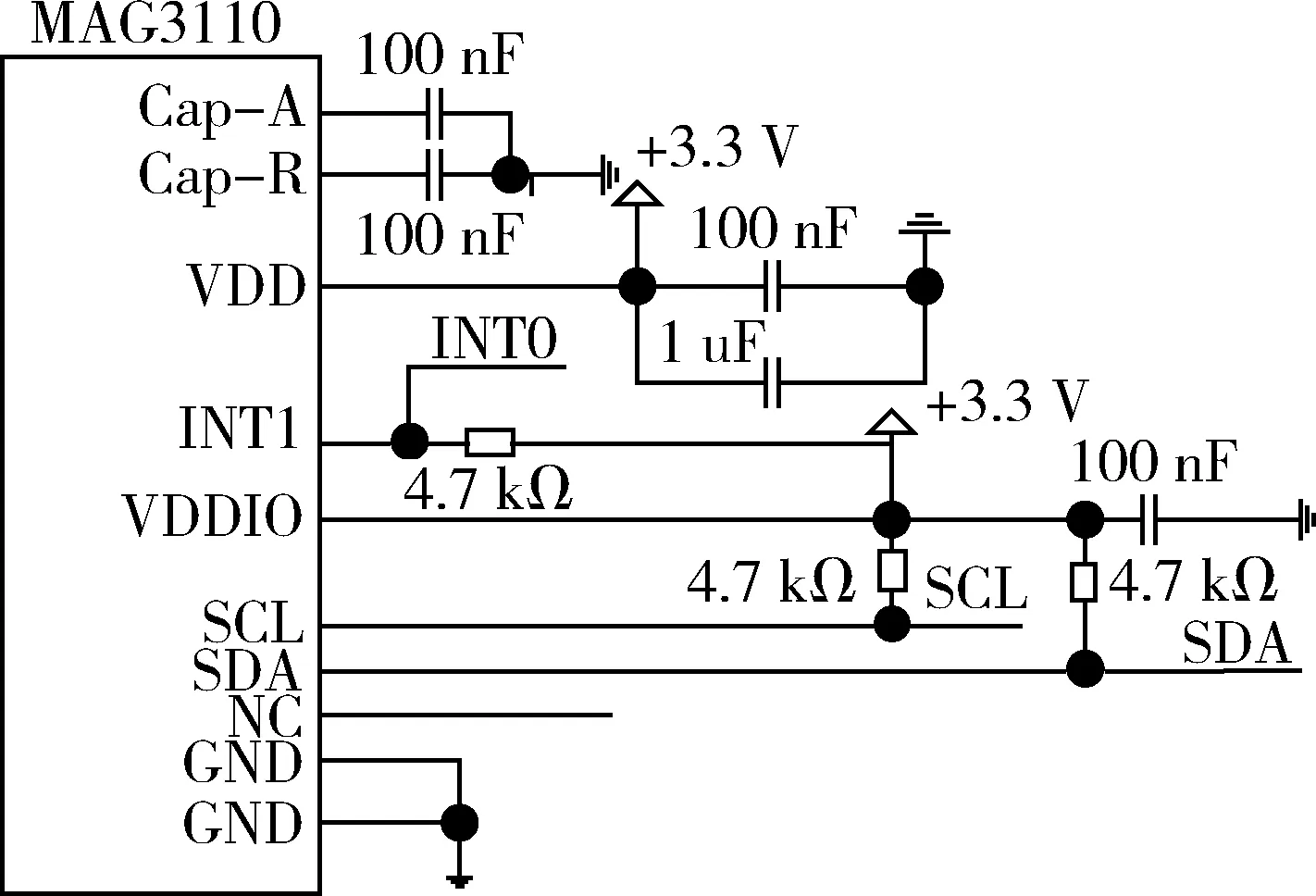
图4 地磁传感器外围电路原理图
地磁传感器的数据采集由单片机端口控制实现,空闲时段均处于高阻态,数据采集时为输入或输出状态。中心接收节点的MCU状态可以由程序设计进行科学节能管理[7]。间歇性地接收探测节点发来的数据,可使CPU同样常处于低功耗模式,LPM3电压为3 V,频率为32 768 Hz,该模式下的工作电流小于2 μA。
维护人员通过软件首次由CC430单片机对地磁检测器参数(包括产品序列号、射频的频段、发送功率等)进行配置。通过人工初次进行八路拨码开关地址配置,触发进入固定频段的配置模式,实现地磁检测器2与电子显示屏1(地磁检测器1与电子显示屏2)参数配置和无线数据链接,完成车辆监测、无线互传、电子屏显示的基本功能。软件设计无线通信部分采用SimpliciTI协议栈设计,系统程序流程图如图5所示。系统遇到外设破坏,尤其是地磁传感器检测功能出现异常(抑或单片机端口采集异常)时,CC430单片机将进入警告提醒模式,及时把故障反馈给电子显示屏,便于设备维护人员及时检修。
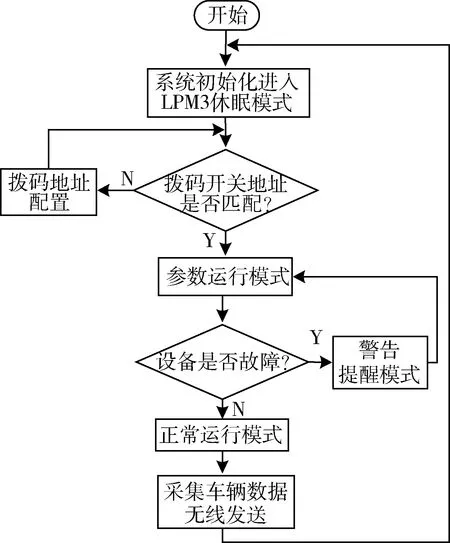
图5 系统程序流程图
3 实验验证与分析
根据电路原理图制成电路板,烧入程序,做成地磁检测器,埋于地下。急转弯会车提示预警系统测试模拟选址在某山区急转弯弯道区域,采用路上随机车辆,车辆检测装置的两套地磁传感器分别对单辆车驶入弯道和驶出弯道的过程在弯道入口或弯道出口处进行了实地模拟测试。每种情况做6组测试,每组测试由20次车辆通过实验组成,进而统计检测出车辆的次数和未检测出车辆的次数,计算车辆的检测率。实验数据如表1所示。
由表1的统计数据可以知道,当单辆车通过车辆检测装置时,系统有较高的检测率。分析得知,系统未检测到车辆的原因,主要是周边环境复杂,包括不可避免工作人员走动及手机通信对无线通信底板有电磁上的干扰,致使地磁检测器2与电子显示屏1(地磁检测器1与电子显示屏2)无线通信传输数据时出现错误。针对实际应用可以在每个通信底板上加盖金属盒屏蔽电场和磁场对通信底板的信号干扰,同时尽量使天线露置于金属盒外端以保证射频部分正常工作[8]。
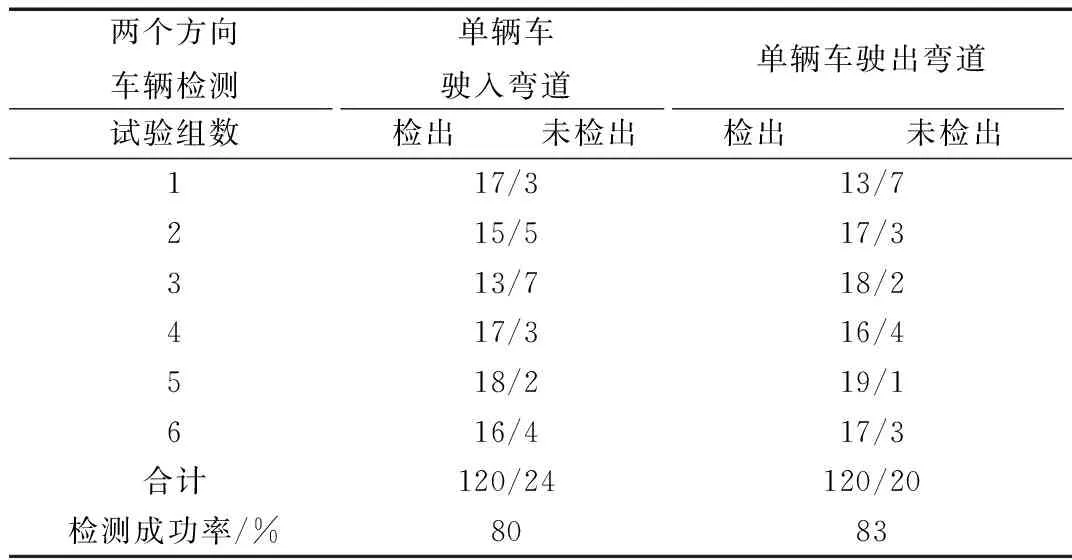
表1 车辆检测数据统计表
4 结论
基于CC430的急转弯会车提示预警系统从山路弯道会车的实际安全需求出发,提出基于地磁传感器的车辆检测方案,设计了一种较为经济的山区公路弯道会车预警系统,不仅弥补了传统警示标志预警的缺陷,并且为解决山区弯道安全问题提供了一定的理论指导和研究基础,满足了偏远地区低成本交通管理的需求,对于生产实践、交通监控领域具有广阔的应用参考价值。
[1] 林涛.山区公路曲线段车辆加速度及轨迹研究[D].上海:同济大学,2008.
[2] 徐婷,孙小端,贺玉龙,等.基于驾驶员短期记忆的限速标志合理间距研究[J].中国公路学报,2011(1):177-180.
[3] Texas Instruments.CC430F5137[EB/OL].(2012-01-xx)[2016-11-24]http://www.alldatasheet.com/datasheet-pdf/pdf/465991/TI1/CC430F5137.html.2016-09-12.
[4] 肖宝森,程兵兵,陈泽坤,等.基于磁阻传感器的车流量检测系统的设计与应用[J].厦门大学学报(自然科学版),2013,52(3):366-369.
[5] 马建程.无线低功耗地磁车辆检测传感器的设计[J].电子产品世界,2014(5):44-48.
[6] 3-AXIS Digital Magnetometer [R/OL].(2011-2-xx)[2016-11-24]www.freescale.com.
[7] 陶刚,胡海兵,汪国庆,等.基于CC430的低功耗无线交通数据采集系统[J].微型机与应用,2016,35(19):35-37.
[8] 刘敏侠,胡署凡,宣晓刚,等.基于自主传感器信号调理芯片应用解决方案[J].电子技术应用,2016,42(5):14-17.
The traffic information early-warning system for sharp turning point based on CC430
Tao Gang1,Hu Haibing2,Wang Guoqing2,Cui Shilin2,Yang Jiande2
(1.Anhui KeLi Information Industry Co.,Ltd.,Hefei 230009,China;2.Hefei University of Technology,Hefei 230009,China)
In terms of the problem of the road traffic accident caused by information collection,information feedback,information processing on sharp curves,the new type traffic information early-warning system for sharp turning point was designed.The module of CC430F5137 chip(TI MSP430 MCU and CC1101 low-power multi-channel wireless RF)is used as the system control core.The geomagnetic sensor can collect and check vehicle information.Two large electronic screens give information in early warning-system,and the front condition can be timely fedback to the driver.Experiments show that the system has high accuracy rate of vehicle for sharp turning point,improves the shortcomings of traditional warning signs.The safety solutions of the traffic information early-warning system for sharp turning point has wide application prospects in intelligent transportation as well.
CC430; low power consumption; sharp curve; safe driving
安徽省自然科学基金青年项目(1408085QKL100)
TN99
A
10.19358/j.issn.1674- 7720.2017.10.009
陶刚,胡海兵,汪国庆,等.基于CC430的急转弯会车提示预警系统[J].微型机与应用,2017,36(10):30-32,36.
2016-11-24)
陶刚(1974-),男,博士,高级工程师,主要研究方向:交通信息工程与控制。
胡海兵(1984-),男,博士,副教授,主要研究方向:嵌入式系统,自动控制技术。
汪国庆(1991-),男,硕士研究生,主要研究方向:无线传感网络,嵌入式系统。
