基于微型传感器的可穿戴远程康复设备的设计
2017-06-15都天慧范晶晶
孟 琳,都天慧,范晶晶,屈 云
1 四川大学华西医院康复医学中心,成都市,610041
2 四川大学华西临床医学院康复医学系,成都市,610041
3 康复医学四川省重点实验室,成都市, 610041
4 康复医学大数据实验室,成都市,610041
基于微型传感器的可穿戴远程康复设备的设计
【作 者】孟 琳1,2,3,4,都天慧1,2,3,4,范晶晶1,2,3,4,屈 云1,2,3,4
1 四川大学华西医院康复医学中心,成都市,610041
2 四川大学华西临床医学院康复医学系,成都市,610041
3 康复医学四川省重点实验室,成都市, 610041
4 康复医学大数据实验室,成都市,610041
针对目前远程康复设备体积大、价格高、不易操作等问题,该文设计开发了基于微型传感器的可穿戴远程康复设备。该设备采用自主研发的算法,能够流畅无延迟的追踪单关节运动,并实现了动作评定的量化考核,同时,微型传感器具有体积小、价格低、易于穿戴等特点。临床研究结果表明,该远程康复设备可以提供便利、有效的康复训练。
远程康复设备;微传感器;有效性
0 引言
随着近年来通信技术的进步及计算机硬件和软件成本的下降,极大地促进了远程康复技术的发展[1]。作为一种新兴的康复手段,远程康复可以通过双向互动通信技术为患者提供远距离的康复服务,包括疾病的咨询、预防、诊断和治疗[2]。目前已有证据表明,远程康复与住院康复相比,在提高卒中患者的运动功能和日常生活活动能力上具有相同的效果[3],但远程康复可节约患者的时间和交通成本[4]。同时,调查发现卒中患者对远程康复设备有很高的需求[5],然而,目前我国市场上康复设备种类少、体积大且价格高。因此开发研制出便携、易于穿戴的远程康复设备显得尤为迫切。
远程康复设备的硬件主要由传感器、患者终端、医生终端、云服务器组成,目前远程设备的传感器大多有训练功能局限、体积大、不易穿戴、价格昂贵等缺点[6]。如奥地利Tyromotion研制的Pablo®系统[7]是一个手持式的康复设备,该设备里只含有一个传感器,可以感知关节的屈伸角。配合一系列应用软件,它可以为病人提供交互式的康复训练。然而,单个传感器不能重建涉及多关节的运动状态,因此无法完成复合关节或全身的康复训练。还有一类是基于机械臂的远程康复设备,它可以通过机械臂里的传感器探测上肢的姿态,并通过配套软件以交互方式协助病人训练,这类产品包括MIT研制的MIME[8]、MIT-MANUS[9-10]及各种CPM机等,但这一类设备只能用于上肢的康复训练,功能局限。同时,由于机械臂设备安装复杂、穿戴麻烦且价格不菲,不易推广到家庭中使用。故为解决上述问题,本文开发设计了基于微型传感器的可穿戴远程康复设备。
1 微型传感器的设计
1.1 微传感器的组成
该微型传感器是根据患者的运动强度设计和开发的,主要由2个传感器和1根数据线组成,见图1(a)。由于只有1根数据线连接,可以减少由患者穿戴错误引起的设备工作异常的发生。同时,由于主传感器还含有蓝牙芯片,可以实现传感器之间的无线连接及数据的打包发送。微型传感器的设计依赖于微电子机械系统(Micro-Electro-Mechanical-Systems, MEMS)[11],主要由中央处理器(Central Processing Unit, CPU)、电源管理器、三轴加速度传感器、三轴陀螺仪和三轴磁力计构成,内部结构见图1(b)。其中,三轴加速度传感器能够感应人体运动产生的加速度和地球重力加速度,三轴陀螺仪可以感应物体转动时的角速度,三轴磁力计可感应其所在位置地磁场的强度[12]。这些内置固件实现了微型传感器对患者肢体运动的追踪,并可以根据环境温度进行校准。
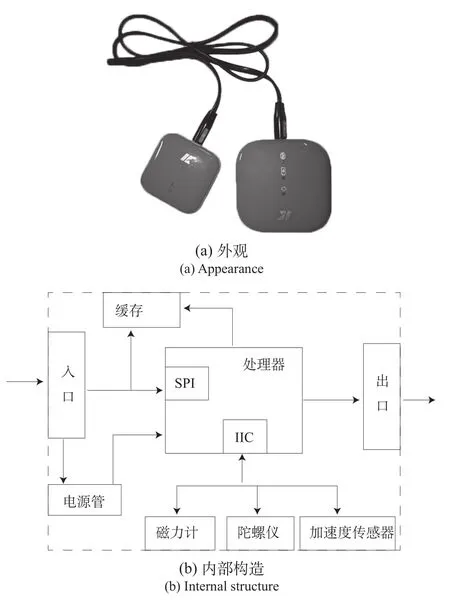
图1 微型传感器[12]Fig.1 Micro-sensors[12]
1.2 微型传感器的选材
设计时考虑到患者进行康复训练的肢体运动速度缓慢的特点,因此,在加速度传感器、陀螺仪和磁传感器的选择上采用了小量程和中等精度的产品,例如加速度传感器量程小于2 g(9.8 m/s2),精度为0.1 m/s2;传感器的采样率为16 Hz,足够用于重建训练者的运动状态。最终,此微型传感器具有了角度跟踪精度小于2o、角速度跟踪精度小于5o/s、位移跟踪精度小于10 cm、运动重建时间小于50 ms等特点。为方便患者携带和佩戴,设计时选择了体积小、质量轻的材料,集成后的传感器体积为 45 mm(长)×35 mm(宽)×10 mm(厚),两个传感器重量仅有60 g。除此之外,为方便患者的使用,减少充电次数,设计时也考虑到了电池的续航能力,若患者使用该设备进行正常的康复训练,则传感器4 d仅需充电一次。而以上材料的选择也有助于降低最终产品的价格。
1.3 微型传感器的穿戴
为了协助微型传感器实现追踪肢体运动的功能,需将其配置在患者身体的固定位置。因此,根据全身和各肢体康复的实际需要,设计和开发出了可重复配置的训练服。该训练服由肢体端和传感器端两部分组成,患者可以对训练服的肢体端进行拆卸,并佩戴在不同的肢体上,从而实现了对不同肢体进行单独康复训练的设计。传感器可放置在此训练服的固定部位,一旦穿戴好,传感器和肢体的相对位置即被固定下来。例如,要进行肩关节的康复训练,2个传感器分别对应放置于躯干和上臂,穿戴完毕后即可独立完成肩关节的康复训练,见图2 (a)。若这2个传感器放置于其他位置,如膝关节,也可进行膝关节的康复训练,见图2 (b)。这一设计减少了训练服的数量和成本,并且丰富了设备的功能,可以完成多个肢体部位的康复训练。此外,由于偏瘫病人的患侧肢体的活动受限,故经过设计后,患者可根据演示图中训练服的位置,用健侧上肢单独完成此训练服的穿戴。
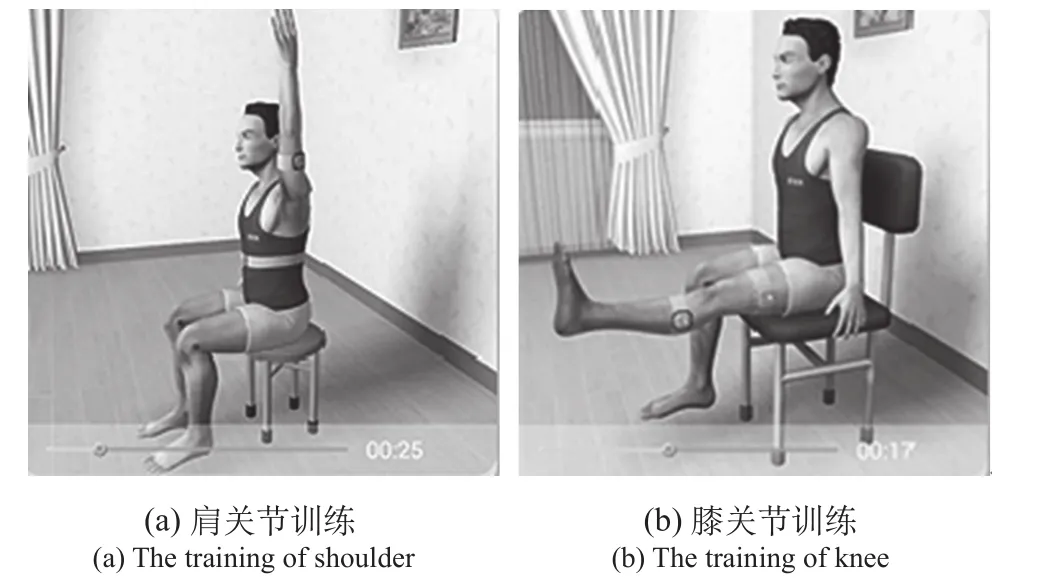
图2 微传感器的穿戴Fig.2 The wear of micro-sensors
2 捕捉和评估运动的设计
2.1 单关节运动的跟踪
为了能够通过微型传感器实现单关节运动的跟踪技术[13],该远程康复设备采用了自主研发的四元素/欧拉角卡尔曼滤波算法[14]。这一算法采用了扩展的卡尔曼滤波(Extended Kalman Filter,EKF)对三轴加速度值进行滤波,来获取传感器在大地坐标的俯仰、偏航和滚转角。相比于传统算法采用的积分方式,该算法克服了误差和容易积累这一问题。依赖于该算法设计的远程康复设备具有实时性,即跟踪单关节运动时流畅无延迟,从而能够准确地捕获和再现人体的运动状态。目前世界上没有任何一款类似功能的医用设备采用该项技术。具有类似功能的远程康复设备主要依赖于光学原理,例如,GestureTek[15]开发的IREX系统和VICON系统。这类产品主要通过采用光学摄像头或红外线摄像头,获取患者的运动影像后再重建运动状态,然后再通过一些交互手段协助病人进行康复训练。而本远程康复设备与这类产品最大差别在于信号采集方式不同,光学采集有较高的环境要求,例如无遮挡、光线适当、训练对象正对摄像头等。而本设备对信号采集时的环境要求非常低,患者几乎可以在任何条件下进行训练。因此,该设备不仅具有很好的单关节运动的跟踪能力,同时更方便患者随时随地使用。
2.2 单关节运动的评估
由于之前没有对肢体运动评估的专用算法。故该设备采用了自主开发的隐马尔科夫模型与卡尔曼滤波结合的评估算法[16]。使用隐马尔科夫模型可以对肢体运动过程的状态转换进行评估,并以概率方式比较实际发生动作和规定动作之间的差异。此算法通过对关节的两侧:运动肢体和支撑肢体分别建模,对肢体运动过程中的俯仰角、偏航角及滚转角进行计算,评估其与要求轨迹、速度、角度的差异,对动作的整体完成情况进行评分,从而实现了训练评定的量化考核。
2.2.1 动作完成的判断
远程康复设备需要在无专业医护人员监控的情况下,感知患者肢体动作完成的程度,并将结果有效地反馈给患者[17]。但由于人机交流不能完全重现医生与患者之间的交流模式,故为解决了这一难题,设计了依赖于微型传感器的评估系统。首先,需设定肢体动作完成时的最低标准:在了解正常人各关节活动度范围的前提下,设定各关节活动的最小目标角度,即关节活动超过该角度时,设备认定患者动作完成。其次,需设定合适的反馈系统:在关节活动达到目标角度(动作完成)后,为了促进患者继续运动,设备不发出提示音,直至患者肢体运动达到极限返回后,活动关节再次达到目标角度时,设备才会提示“很好”或“完成”。设备设定完成每个动作的总时长上限为10 min,若超过此时间或动作未完成,则设备会发出“再来一次”的提示音。患者终端会对运动过程中动作在每一时刻的进展进行实时的评估。例如,当患者在到达目标点后给出“很好”的提示;当患者在完成某一动作速度过慢时,会提示“快一点”等。最后,该设备可以根据患者关节活动的最终角度及所用的时间进行评分。其中实时提示的产生和动作完成质量的评估采用了前面所述的专用算法。
2.2.2 异常动作的判断
在医院进行康复治疗时,治疗师可以对患者进行实时的观察,并及时纠正患者的异常运动,该远程康复设备为实现这一过程开发了相应的解决方案。首先,开始动作前需先在标准位置进行微型传感器的校准,即按照患者终端中动画演示的体位进行校正。其次,观看患者终端中正常训练动作的动画演示。最后,在患者的训练过程中,设备可以通过微型传感器感知患者的实际运动轨迹,并同步上传至患者终端,再通过三维动画重建的形式,直观地反应患者肢体的运动轨迹,同时与设定的标准训练动作的运动轨迹进行对比。若患者运动偏离正常的运动轨迹,为了防止误判,设备不会立即发出提示音,但一旦错误持续的时间超过2 s,设备便会提示患者错误,并同时用动画及语音的方式指导患者纠正错误运动。这样的设计可以保证患者在无监管时康复训练的正确性,有效地避免了异常运动模式的产生。
3 临床试验
为进一步验证该远程康复设备的有效性,在四川大学华西医院康复医学科开展临床试验。试验共纳入44例脑卒中患者,所有患者均无认知障碍、感觉性失语及完全性失语。将44例患者随机分为远程康复组与对照组,其中对照组仅进行康复训练,远程康复组除接受康复训练外,每天还需接受30 min~45 min的远程康复训练,持续治疗3周。采用Brunnstrom评定两组患者治疗前后的上肢运动功能。统计分析时,等级资料采用秩和检验或2检验。该试验方案已通过中国伦理委员会审查,并与患者签署相关知情同意书。
远程康复组共纳入2 2例患者,男1 3例,女9例;平均年龄(53.45 ±14.53)岁;平均病程(46.82±35.76)d。对照组纳入22例患者,男14例,女8例;平均年龄(54.32 ±10.98)岁;平均病程(47.91±33.85)d。两组比较,差异无统计学意义(P>0.05)。远程康复组及对照组中各有1例患者失访,最终共42例患者完成实验。将脱落患者的最后一次评定结果进行转化,针对其疗效采用意向性分析(Intention-to-treat, ITT)。对完成实验的42例患者患侧上肢Brunnstrom分级的变化进行记录与分析,见表1。
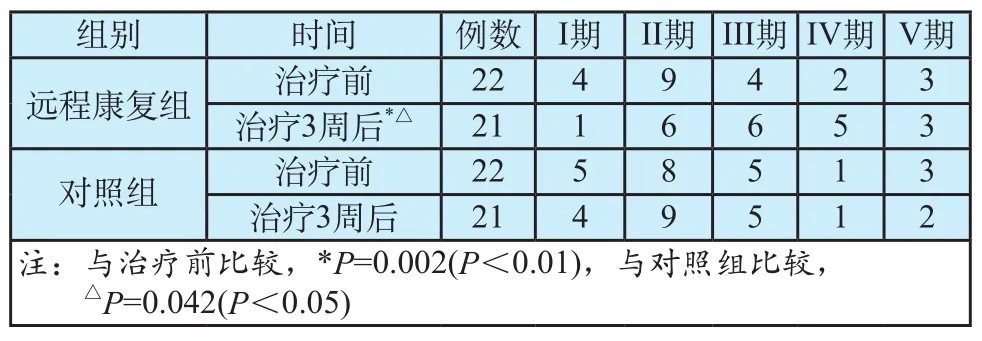
表1 两组治疗前后上肢Brunnstrom分级比较(例)Tab.1 Comparison of upper limbs Brunnstrom stages before and after treatment between two groups(n)
Brunnstrom将偏瘫患者运动恢复过程分为Ⅰ~Ⅵ期,即弛缓期、联带运动期、协同运动期、部分分离运动期、分离运动期和正常运动期。研究发现,治疗3周后,远程康复组患者患侧上肢的 Brunnstrom分级与治疗前比较,差异具有统计学意义(P<0.01);与对照组比较,差异具有统计学意义(P<0.05),表明经过3周的治疗后,远程康复组的疗效较对照组明显。实验结果说明,采用该设备进行远程康复训练可以加快脑卒中患者患侧上肢Brunnstrom的恢复过程,促进其上肢运动功能的恢复。
4 结论
目前脑卒中已成为导致残疾的主要病因,每年有五百万人因此遗留各种功能障碍[18],影响其日常生活活动[19],但仍有很多患者的康复治疗需求无法被满足[20],而远程康复的应用可以有效改善这种情况,使更多的人享受康复治疗[2]。本文设计开发的基于微型传感器的远程康复设备克服了现有设备的缺点,并能够依赖于微型传感器,实现单关节运动流畅无延迟的追踪及动作评定的量化考核,而且通过临床研究,发现其有利于加快脑卒中患者上肢Brunnstrom的恢复过程,具有很好的有效性和便利性,有着广泛的应用前景。因此,该设备为促进远程康复的发展和满足更多患者的康复需求提供了可能。
[1] Dorsey E R, George B P, Leff B, et al. The coming crisis: obtaining care for the growing burden of neurodegenerative conditions[J]. Neurology, 2013, 80(21):1989-1996.
[2] Laver K E, Schoene D, Crotty M, et al, Telerehabilitation services for stroke[J]. Cochrane Database Syst Rev, 2013, 12(12): CD010255.
[3] Chen J, Jin W, Zhang X X, et al. Telerehabilitation approaches for stroke patients: systematic review and meta-analysis of randomized controlled trials[J]. J Stroke Cerebrovasc Dis, 015, 24(12): 2660-2668.
[4] Krebs H I, Volpe B T, Lynch D, et al. Stroke rehabilitation: an argument in favor of a robotic gym[C]// IEEE Int Conf Rehabil Robot, 2005: 219-222.
[5] Perry J C, Ruizruano J A, Keller T. Telerehabilitation: toward a cost-eff i cient platform for post-stroke neurorehabilitation[C]// IEEE Int Conf Rehabil Robot, 2011: 1-6.
[6] Turchetti G, Vitiello N, Trieste L, et al. Why effectiveness of robotmediated neurorehabilitation does not necessarily influence its adoption[J]. IEEE Rev Biomed Eng, 2014, 7: 143-153.
[7] http://www.tyromotion.com.
[8] Lum P S, Burgar C G, Shor P C. Evidence for improved muscle activation patterns after retraining of reaching movements with the MIME robotic system in subjects with post-stroke hemiparesis[J]. IEEE Trans Neural Syst Rehabil Eng, 2004, 12(2): 186-194.
[9] Lo A C, Guarino P D, Richards L G, et al. Robot-assisted therapy for long-term upper-limb impairment after stroke[J]. N Engl J Med, 2010, 362(19): 1772-1783.
[10] Krebs H I, Volpe B T, Williams D, et al. Robot-aided neurorehabilitation: a robot for wrist rehabilitation[J]. IEEE Trans Neural Syst Rehabil Eng, 2007, 15(3): 327-335.
[11] Ho C M, Tai Y C. Micro-electro-mechanical-systems (MEMS) and fl uid fl ows[J]. Annu Fluid Mech, 1998, 30(30): 579-612.
[12] 吴健康, 黄帅, 董梁, 等. 一种基于微型传感器的交互式上肢康复系统: CN102567638A[P]. 2012.
[13] Dong L,Wu J K,Bao X M, et al. Tracking of thigh flexion angle during gait cycles in an ambulatory activity monitoring sensor network[J]. Acta Automat Sinica, 2006, 32(6): 938-946.
[14] Wu J K, Dong L, Bao X M. Stream segmentation-a data fusion approach for sensor networks[J]. Acta Automat Sinica, 2006, 32(6): 856-866.
[15] Holsti L. The GestureTek virtual reality system in rehabilitation: a scoping review[J]. Disabil Rehabil Assist Technol, 2014, 9(2): 89-111.
[16] Dong L, Wu J K, Bao X M. A hybrid HMM/Kalman filter for tracking hip angle in gait cycle[J]. Ieice T Inf Syst, 89(7): 2319-2323.
[17] Brennan D M, Mawson S, Brownsell S. Telerehabilitation: enabling the remote delivery of healthcare, rehabilitation, and self management[J]. Stud Health Technol Inform, 2009, 145: 231-248.
[18] Mackay J, Mensah G A. The atlas of heart disease and stroke[R]. WHO, Geneva: WHO Press, 2004.
[19] Hackett M L, Duncan J R, Anderson C S, et al. Health-related quality of life among long-term survivors of stroke: results from the Auckland Stroke Study, 1991-1992[J]. Stroke, 2000, 31(2): 440-447.
[20] Andrew N E, Kilkenny M, Naylor R, et al. Understanding longterm unmet needs in Australian survivors of stroke[J]. Int J Stroke, 2014, 9(A100): 106-112.
Design of Wearable Telerehabilitation Device Based on Micro-sensors
【Key words 】MENG Lin1,2,3,4, DU Tianhui1,2,3,4, FAN Jingjing1,2,3,4, QU Yun1,2,3,4
1 Center of Rehabilitation Medicine, West China Hospital, Sichuan University, Chengdu, 610041
2 Department of Rehabilitation Medicine, West China Medical School, Sichuan University, Chengdu, 610041
3 Rehabilitation Key Laboratory of Sichuan Province, Chengdu, 610041
4 Big Data Laboratory of Rehabilitation Medicine, Chengdu, 610041
telerehabilitation device, micro-sensors, effectiveness
TK124
A
10.3969/j.issn.1671-7104.2017.03.009
1671-7104(2017)03-0189-04
2016-10-25
四川旭康医疗电器有限公司委托项目(H1212128)
屈云,E-mail: dr_yunqu@163.com
【 Abstract 】In order to overcome the disadvantages of current telerehabilitation equipment, such as large volume, high price and dif fi cult to operate, in this paper, we designed and developed a wearable telerehabilitation device based on microsensors. Self-developed algorithms were adopted, so that the device can track single-joint movement without delay and realize the quantitative evaluation of motor assessment, meanwhile, the micro-sensor has the characteristics of small volume, low price and convenient wearing. The clinical research showed that this remote rehabilitation equipment can provide fl exible and effective rehabilitation training.
