飞机导航性能评估与研究
2017-06-13张伟

摘 要:飞机能否在指定空域中安全有效地运行,很大程度上取决于机载导航系统的实际导航性能能否满足航路所需导航性能的要求本文主要研究内工作首先是对导航系统的性能进行评估,分析导航系统的性能,并主要针对组合导航系统推导、建立对完好性、精度等导航性能评估的算法,对飞机导航系统的评估进行了高度的概括,为后续研究者提供一定的指导意义。
关键词:导航系统;精度;完好性
1 前言
近年来随着科学技术的不断进步,航空运输业得到了迅猛的发展,这使得空中交通日益繁忙、要求空运能力迅速提高,与此同时,空中交通拥挤及其管理困难等问题也日益凸显,这就需要对飞行轨迹进行优化,以达到降低成本、飞行安全、优化空域等目的。为了规划更好地航路,对导航性能的要求也越来越高[1]。
一个导航系统要成为主要的导航系统,要满足性能包括:完好性、可用性、精度和连续性。导航性能标准是在一个特定区域、航线或过程中衡量导航系统性能的一个手段。导航性能标准的三个参数定义如下[2]:
1)精度是指系统作为运载体所提供的位置、速度和运载体当时真实位置、速度的重合度;
2)完好性是指当系统不适于导航时,导航系统及时向用户发出警报的能力,其衡量标准是系统不具有完好性的概率;
3)连续性是指系统在给定的使用条件下、在规定的时间内、以满足精度和完好性要求的情况下完成其功能的概率,其假定在起始时系统是可用的。连续性要求是通过单位时间内连续性中断的时间来体现;
2 导航系统性能评估
2.1 完好性评估
GPS 系统作为一种导航系统除了要提供导航系统精度与可用性外,还必须具有在该系统不能使用时及时向用户发出告警的能力,即系统的完好性。完好性问题对于航空来说是关系重大的,因为用户正以高速航行,而且很快就可能会偏离航路。如果要用GPS 作为唯一导航系统的话,完好性功能就变得尤其关键了。完好性检测方法主要有三种[3]:
1.应用卫星导航系统本身的余度(接收机自主式完好性检测 RAIM (Receiver Autonomous Integrity Monitoring));
2.应用其他自主式导航设备(如高度表,时钟,惯导)的补充信息,或其他的外部导航系统;
3.建立一种卫星状态监视和信息广播系统。
完好性是指导航系统发生任何故障或误差超过允许限度时,系统发出及时告警的能力。完好性主要参数定义如下:
1.报警阈值:系统位置误差允许的最大值HAL;
2.完好概率:在TTA这段时间内位置误差超过了警报阀值而不发出任何警告的概率;
3.保护水平PL:PL通常是由用户差分距离误差UDRE和电离层网格结点的垂直误差来计算,其中水平方向的保护水平为HPL。
具体的完好性要求(水平)如下表所示:
2.2精度评估
精度评估主要是针对陀螺仪和加速度计的误差水平,也就是要保证陀螺仪和加速度计的误差在规定的范围之内稳定,即确保系统的正常工作。对于组合导航系统而言,精度评估主要是指位置精度(如图1所示)评估,即系统为用户所提供的位置和用户真实位置在一定置信概率下的重合度的确定,主要通过位置估计误差 EPU 进行估计。当信号从地面系统向空域系统传递时,对此参数的评估是不同的。基于地面站的系统例如 ILS 或 VOR)有可重复性,因此当在飞行过程中评估性能时,在下一次评估之前精度就不会改变了。对于 GNSS 而言,由于卫星轨道的连续变化和信号在大气层中的传播,系统误差特征是随时随地改变,其中 GNSS 的精度要求在任意指定地点的位置估计误差要满足至少在规定的时间内 95%的误差概率。
飞机的定位通常用经纬度坐标的形式,因此导航定位误差通常表示为球面坐标系内的位置误差:
其中,为纬度误差, 为经度误差, 是非水平面误差。
从卡尔曼滤波得到的协方差阵中分割出的球面坐标系位置误差的协方差矩阵为:
将经纬度误差转换为水平面内直角坐标系内的直线位置误差:
其中, xE为东北天坐标系内飞机沿东西方向的误差,Yn为沿着南北方向的位置误差,Re是地球半径,L为飞机所在位置的纬度。由于飞机导航系统利用卡尔曼滤波器实现各种不同的导航系统组合,卡尔曼滤波器的协方差矩阵给出导航系统的随机误差估计值,其中的经纬度误差用于实际导航性能的计算。
1.递推算法,且在时域内采用状态空间法设计滤波器,因此其适用于对多维随机过程的估计。
2、采用动力学方程即状态方程描述被估计量的动态变化规律,被估计量的动态统计信息由激励白噪声的统计信息和动力学方程确定。
3、分为连续型和离散型两类。
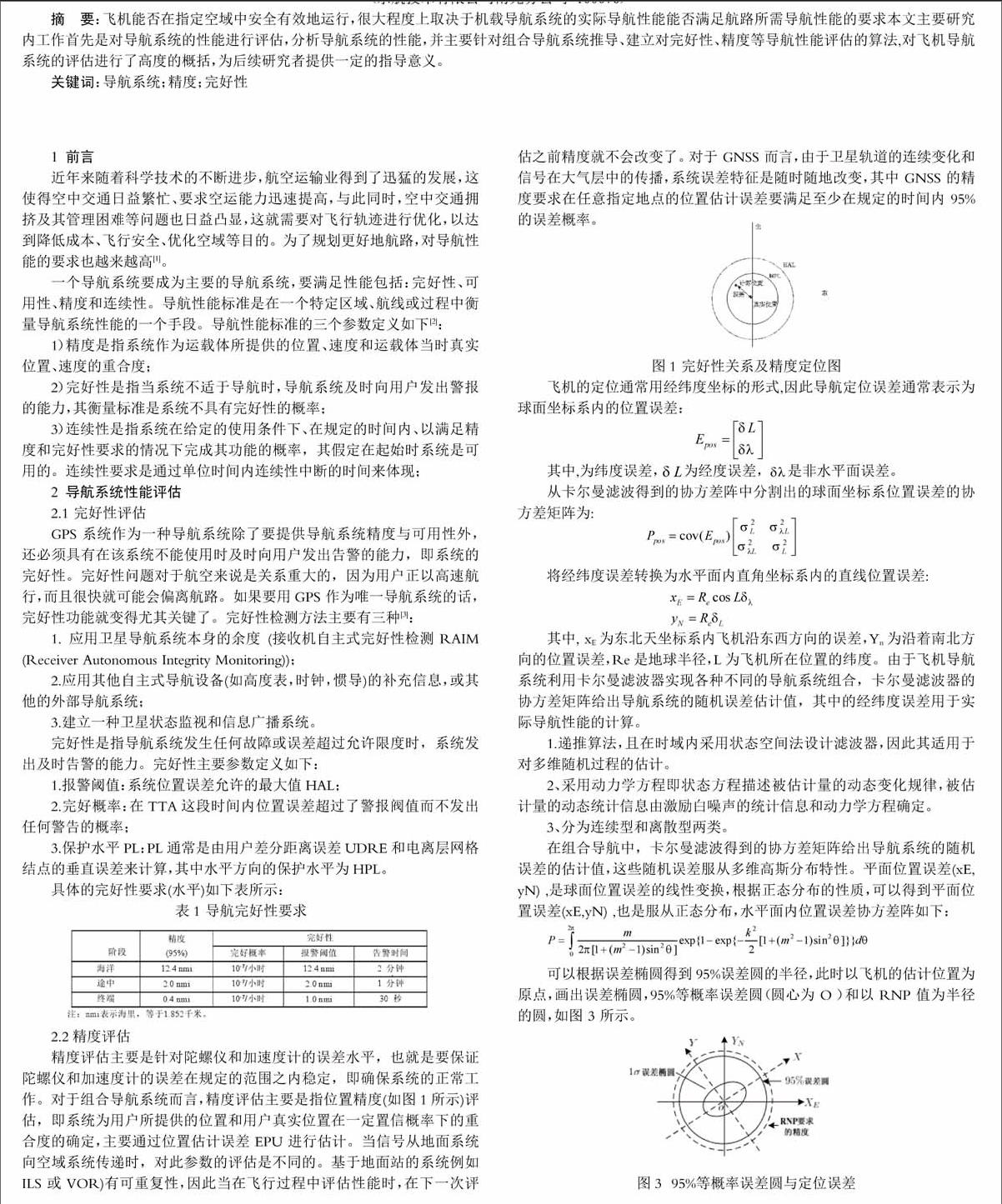
在组合导航中,卡尔曼滤波得到的协方差矩阵给出导航系统的随机误差的估计值,这些随机误差服從多维高斯分布特性。平面位置误差(xE,yN) ,是球面位置误差的线性变换,根据正态分布的性质,可以得到平面位置误差(xE,yN) ,也是服从正态分布,水平面内位置误差协方差阵如下:
可以根据误差椭圆得到95%误差圆的半径,此时以飞机的估计位置为原点,画出误差椭圆,95%等概率误差圆(圆心为 O )和以 RNP 值为半径的圆,如图 3 所示。
3 结束语
本文首先介绍了评价导航系统的四个指标:完好性、可用性、精度和连续性,着重研究了完好性和精度指标的实际意义和评估标准,对后续研究者进行飞机导航系统的评估有一定的指导意义。
参考文献:
[1] Special Committee 159.Minimum Operational Performance Standards for GlobalPositioning System/Wide Area Augmentation System Airborne Equipment.DocumentDO-229C,D.C.Washington,2001:32-43
[2] 周忠谟,易杰军.GPS 卫星测量原理与应用[M].北京测绘出版社,1992:57-166
[3] 王永超,黄智剐.三种导航卫星故障识别方法的等价性研究[J].遥测遥控,2006,27(1):51-55
作者简介:
张伟,1980-11-29,男,汉,河北省,东航技术南苑分公司,助理工程师,飞机维修。
