双声纳探头差动扫描的挂舷式船舶吃水测量方法*
2017-06-09舒岳阶周远航
吴 俊, 舒岳阶, 周远航
(1.重庆交通大学 西南水运工程科学研究所,重庆 400016; 2.重庆交通大学 内河航道整治技术交通运输行业重点实验室,重庆 400074)
双声纳探头差动扫描的挂舷式船舶吃水测量方法*
吴 俊1,2, 舒岳阶1, 周远航1
(1.重庆交通大学 西南水运工程科学研究所,重庆 400016; 2.重庆交通大学 内河航道整治技术交通运输行业重点实验室,重庆 400074)
针对现有船载式船舶吃水测量方法的局限,提出了一种基于双声纳探头差动扫描的挂舷式船舶吃水测量方法。在详细分析船舶弧形轮廓外形基础上,利用双声纳探头差动扫描技术,建立测量船舶吃水量的数学模型,设计了一种船舶吃水测量方法。设计了实验方案,搭建了小比尺船模吃水深度实验系统,获取了小比尺船模吃水深度,通过对5组吃水测量结果的统计分析发现,小比尺船模吃水深度测量最大相对误差为4.87 %,精度较高,满足实际工程误差要求,验证了该设计方案的可行性。
船舶工程; 超吃水; 超声波; 回波; 船舶吃水
0 引 言
大型船舶的“超吃水”问题已经成为航道主管部门关注的重大问题[1]。现有船舶吃水深度检测方法主要可分为两类:1)固定式,主要包含侧壁声呐阵列固定测量法、水底声呐阵列固定测量法与双测深仪检测法。该类方法需将测量装置固定在航道某个位置,安装和维护麻烦,而且由于枯水期危险浅滩具有分散性,固定安装方式不能灵活地对航道中疑似超吃水船舶进行随机抽查[2~7]。2)船载式,主要为图像法与多波束侧扫声呐,该类装置可安装在执法船上,灵活对船舶进行吃水深度测量,但是图像法受限条件较多,测量精度不高,多波束侧扫声呐完全依赖进口,价格极为昂贵,且在宽浅河道使用时易受混响信号影响,所以,多波束声呐侧扫测量方法难以在内河航道推广使用[8~10]。
通过比较固定式与船载式两种测量方法,不难发现船载式船舶吃水测量方法灵活、方便,直接搭载在执法船上即可流动测量,代表了船舶吃水测量技术的发展方向。本文针对现有船载式船舶吃水测量方法的局限,提出了一种结构简单、成本较低的搭载式船舶吃水测量新方法。实验结果表明,测量最大相对误差为4.87 %,满足工程应用要求。
1 船舶吃水测量基本原理
基于双超声探头差动扫描的挂舷式船舶吃水测量方法如图1所示,测量装置直接安装固定在执法船的船舷上,包含电机、竖向导轨、收发式超声探头、接收型超声探头、控制部件与信号处理部分。以水面作为船舶吃水测量的基准面,收发式超声探头与接收型超声探头可在软件控制下沿导轨竖向差动扫描测量,实现对船舶吃水深度的测量。
如图1(a)所示,当超声波波束以水平方向投射在其垂直区域上时,仅收发式超声波探头即可获取到有效回波信号;当扫描阶段进入船舶壳体下部弧面区域后,如图1(b)所示,由于回波信号与超声波波束信号之间存在夹角,当夹角达到一定数值后,收发式超声波探头无法获取到有效回波信号,此时,通过使收发式超声波探头驻停在信号跳变位置,同时控制接收型超声波探头向下移动以寻找有效回波信号,当接收型超声波探头寻找到有效回波信号后,根据超声波定位原理以及简单的几何关系,确定出反射面的位置,最终根据扫描过程中记录到的反射面位置复原出船舶的外壁轮廓,进而检测出船舶的吃水深度。
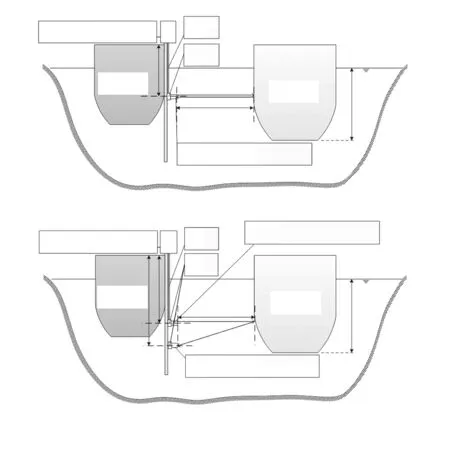
图1 测量原理
当收发式超声波探头工作在被测船弧形区域时,由于超声波反射平面为弧形,因此,收发式超声波探头、接收型超声波探头和反射面三者的位置构成直角三角形[11]。
设丝杠对应步进电动机行程为l0/脉冲,信号控制器向收发式超声波探头滑块发出脉冲数为n1,则收发式超声波探头距离执法船面距离h1为
h1=l0n1
(1)
设丝杠对应步进电动机行程为l0/脉冲,信号控制器向接收型超声波探头滑块发出脉冲数为n2,则接收型超声波探头距离执法船面距离h2为
h2=l0n2
(2)
设超声波波速为v1,发射和接收超声波时间差为t2,则超声波的行程s为
s=v1t2
(3)
根据图1(b)所示形成的三角关系可得
(s-L)2=L2+(h2-h1)2
(4)
化解式(4)可得收发式超声波探头与超声波反射面之间的水平距离L为
(5)
根据图1以及式(1)、式(5)可以实时计算出被测船相对于执法船的轮廓点,其每一时刻轮廓点坐标值为(L(t),h1(t));根据实时轮廓点绘制出被测船轮廓线,并且找出轮廓线最低点,计算出被测船舶吃水深度h1(n1)。
2 船舶吃水测量系统组成及算法研究
2.1 船舶吃水测量系统组成
船舶吃水测量系统主要由信号处理控制器、步进电机、导轨、丝杠、滑块、收发式超声波探头、接收型超声波探头组成,具体船舶吃水测量系统如图2所示。

图2 船舶吃水深度测量系统组成示意
传动装置和滑块均设置于支架外侧面上,支架内侧面与执法船侧舷连接;传动装置与滑块通过丝杠副连接,并且2个滑块的运动范围相同;收发式超声波探头设置于一个滑块上,接收型超声波探头设置于另一个滑块上;收发式超声波探头和接收型超声波探头运动轨迹同轴线如图3所示。步进电动机通过丝杠副将转动转换为滑块直线运动从而实现滑块的往复直线运动。
2.2 船舶吃水测量算法研究
执法船检测被测船吃水深度的具体方法如图3。
1)检测开始,收发式超声波探头发射超声波并获取回波信号,同时,收发式超声波探头下移并且记录脉冲数n1。
2)若收发式超声波探头始终能收到回波信号并且其下移至最大行程位置处,则根据式(1)计算吃水深度;若在下移过程中收发式超声波探头回波信号消失则驻停,并且启动接收型超声波探头下移,若接收型超声波探头下移至最大行程位置处时仍无法收到回波信号,则根据式(1)计算吃水深度;若接收型超声波探头下移过程中收到了回波信号,则接收型超声波探头在该位置处驻停。
3)收发式超声波探头继续下移,若其下移至最低处时,接收型超声波探头仍能接收到回波信号,则根据式(1)计算吃水深度;收发式超声波探头在下移过程中若接收型超声波探头回波信号消失,则收发式超声波探头驻停,接收型超声波探头继续下移;若接收型超声波探头下移至最低处时仍无法收到其回波信号,则根据式(1)计算吃水深度;若接收型超声波探头下移过程中接收型超声波探头收到回波信号,则接收型超声波探头驻停,返回步骤(3)。
4)检测过程结束,收发式超声波探头和接收型超声波探头关闭并回到初始位置处。
3 实验研究与结果分析
实验系统结构如图4所示,控制器控制收发式超声波探头发射接收超声波、步进电机运动以及接收型超声波探头接收超声波。
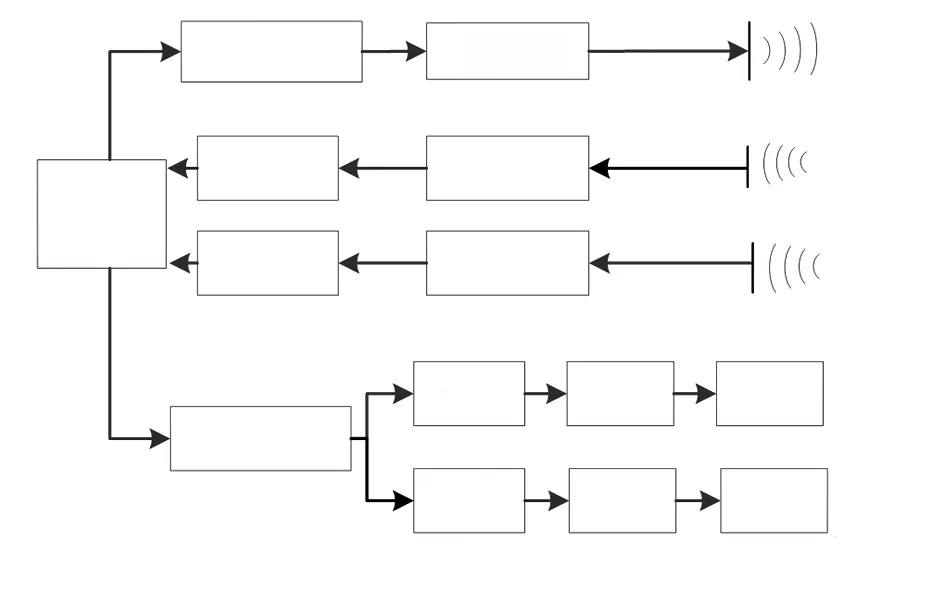
图4 实验系统
实验中,选用主频为100kHz的收发式超声波探头,其水下有效传播距离为100m,测量组件的线性扫描精度为0.5mm/脉冲,竖直方向往复扫描量程为25cm。实验船舶选用川江3 000t级典型船舶,利用其1∶50比尺船模进行实验,实验仅在静水条件下进行。

图5 小比尺船模
实验以水面作为基准面,扫描脉冲数等于控制器脉冲累计计数器数值,根据h1=nll0计算船舶吃水深度。对船舶共进行了5次吃水深度测量,实验结果如表1所示。其中,导轨滑块运动距离为0.5 mm/脉冲,实际吃水深度为15.4 cm。

表1 测量结果
从实验结果可以看出,最大相对误差为4.87 %,满足实际工程船舶吃水深度测量要求。
4 结束语
本文提出了一种成本较低、安装简便、可搭载在执法船上进行实时检测船舶吃水深度的测量系统。对测量系统进行了硬件设计以及测量算法分析,并且设计了小比尺船舶吃水测量实验获取了实验数据,通过对5组吃水测量结果的统计分析发现,吃水深度测量最大相对误差为4.87 %,其精度较高可以满足工程实践要求,验证了本文设计方案的可行性。
[1] 童 飞,曾 文.“超吃水”航行管理问题研究[J].中国水运,2008(7):32-33.
[2] 骆国强,朱汉华,陈一奇,等.手持式智能船舶吃水及载重测量仪研制[J].航海工程,2007,36(6):27-29.
[3] 陈文炜,俞 汲,徐 杰,等.一种船舶吃水测量系统[J].中国造船,2013,54(1):166-171.
[4] 吴 俊,丁甡奇,余 葵,等.内河离港船舶吃水在线动态扫描检测方法[J].水利水运工程学报,2013(5):83-88.
[5] 吴 俊,丁甡奇,余 葵,等.船舶底部纵剖轮廓线扫描测量方法[J].交通运输工程学报,2014,14(2):62-67.
[6] 孙国元,毛奇凰.自动检测船舶吃水和稳性参数的方法探讨[J].中国航海,2002(2):28-30.
[7] 王 勇,颜昌平.船舶吃水现场检测技术及方法探讨[J].中国水运报,2008(8):44-45.
[8] 熊木地,朱四印,李 禄,等.通航船舶吃水实时检测系统数据处理方法研究[J].仪器仪表学报,2012,33(1):173-180.
[9] 罗 宁.内河船舶吃水自动检测装置研究及应用前景[J].中国水运,2012,12(2):86-88.
[10] 毕方全,梁 山.船舶“超吃水”航行动态检测方法研究[J].中国水运,2011,11(7):1-3.
[11] 闫其年,王 旭.简易超声水听传感器的设计与制作方法[J].传感器与微系统,2010,29(11):117-119.
Ship’s draft measurement method based on double probe differential scanning sonar for hanging type side ship*
WU Jun1,2, SHU Yue-jie1, ZHOU Yuan-hang1
(1.Southwestert Research Institute of Waterway Engineering,Chongqing Jiaotong University,Chongqing 400016,China; 2.Key Laboratory for Inland Waterway Engineering of Ministry of Transport,Chongqing Jiaotong University, Chongqing 400074,China)
In view of the limitation of the existing ship’s draft measurement methods.A hanging side ship method based on double sonar probe differential scanning is presented to detect the depth of ship’s draft.On the basis of detailed analysis on ship’s curved contour shape,use double sonar differential scanning technology,mathematical model for ship’s draft measurement is set up,design a draught measurement method of ship.Through statistical analysis on 5 groups of draft measurement results,it is found that the maximum relative error is only 4.87 %,and the precision is higher than the actual engineering error,which verifies the feasibility of the design scheme.
ship engineering; super draft; ultrasonic; echo; ship’s draft
2016—07—05
重庆市基础与前沿计划资助项目(CSTS 2014JCYJA70006);重庆市教委科学技术研究项目(KJ1500514)
10.13873/J.1000—9787(2017)06—0032—03
U 666
A
1000—9787(2017)06—0032—03
吴 俊(1981-),男,工学博士,副研究员,主要从事水运航道工程相关测量技术研究工作,E—mail:wujun_gd@126.com。