动车组车辆横向失稳原因辨识方法研究
2017-06-05陈德赛吴华丽
陈德赛,吴华丽
(1.四川省成都市第七中学,成都 610041;2.西南交通大学牵引动力国家重点实验室,成都 610031)
动车组车辆横向失稳原因辨识方法研究
陈德赛1,吴华丽2,*
(1.四川省成都市第七中学,成都 610041;2.西南交通大学牵引动力国家重点实验室,成都 610031)
动车组车辆横向稳定性是车辆服役安全的评估指标,曾发生多起横向失稳故障。通过横向失稳的失效链路分析,根据车辆横向失稳的特征频率、振动传递关系,辨识了车辆横向失稳的3类原因。通过轮对、轴箱和构架异常振动,结合车辆运行线路,辨识踏面异常磨耗是车辆横向失稳的主要原因;通过构架和车体枕梁的振动传递关系,辨识蛇行减振器和二系横向减振器阻尼值减小是车辆横向失稳的主要原因;通过构架振动的多边形特征频率,辨识车轮多边形是车辆横向失稳的主要原因。提出的车辆横向失稳原因辨识方法应用于某型动车组,为该型动车组横向失稳原因辨识提供了参考。
铁道车辆;横向失稳;失稳影响因素;失效链路;失稳原因辨识
0 引言
动车组在2015年5~7月期间发生了7起横向失稳故障,至今其横向失稳原因没有明确解释。
国内有大量的学者研究过铁路车辆横向失稳。董浩[1]对铁道车辆运动稳定性机理及分岔类型进行了深入研究。贾璐等[2-3]分别采用构架加速度幅值、轮对加速度均方根值、构架加速度均方根值、轮轨导向力之和均方根值、UIC构架加速度幅值来表征车辆横向失稳,并对比分析了5种评价方法下所得临界速度,这5种横向失稳表征方法可作为借鉴。陈政南等[4]对车体和构架横向加速度、轮轴横向和轮轴垂向力3个方面在车辆横向失稳时呈现的动力学性能特征进行了分析,归纳和总结可以通过构架和车体的横向振动加速度来评判车辆是否横向失稳,还可以通过轮轨横向力和垂向力出现的特征来辅助判断;田光荣[5]针对铁路货车的时域和频域特征,提出了我国铁路货车蛇行失稳评判的限值;甘敦文[6]采用统计特征量来描述高速列车横向失稳,建立描述高速列车车辆横向加速度信号分布的高速列车高斯混合振动模型,基于贝叶斯聚类算法实现高速列车横向稳定性的识别;张雪珊等[7]采用数值仿真的方法,研究了高速车轮椭圆化问题将导致车辆系统横向蛇行失稳,严重恶化其运行品质,并大大降低其横向稳定性。以上学者对铁道车辆运动稳定性机理、振动特征和辨识方法进行了研究,但目前尚未开展基于车辆系统振动辨识车辆系统横向失稳原因的研究。
本研究在对车辆系统稳定性认识的基础上,通过车辆系统动力学行为,建立车辆系统横向失稳链路,并在此基础上进一步开展基于车辆振动的横向失稳原因辨识研究,研究数据均来源于课题组研究工作。
1 车辆横向失稳机理及失稳影响因素分析
1.1 车辆横向失稳机理
车辆横向稳定性机理研究用到的评价指标为临界速度,图1为3种典型的系统失稳分岔形式,其中最靠近坐标左侧的失稳速度(图1a、1b中的B点)为非线性临界速度,横坐标轴上的失稳速度点A为线性临界速度,车辆横向稳定性的评价指标为非线性临界速度[8]。
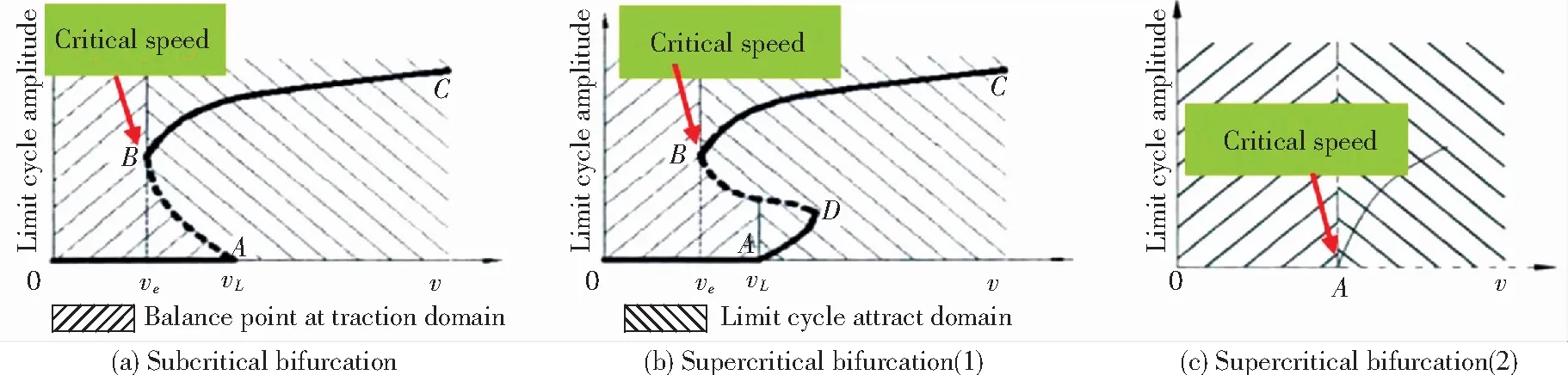
图1 典型失稳分岔形式Fig.1 Typical bifurcation form of lateral instability
1.2 车辆横向稳定性影响因素研究
本研究通过多体动力学软件SIMPACK建立某型动车车辆动力学模型,如图2所示。车辆蛇行临界速度计算采用的轨道激扰类型为理想轨道不平顺,即假定轨道不平顺幅值为0,仅在初始条件下给车辆施加一横向脉冲激扰;计算方法采用“恒速”法,即给定某一计算速度,观察在初始激扰下构架蛇形运动的收敛情况,若收敛则增大计算速度,反之则降低速度,直至找到列车稳定的最大运行速度。

图2 车辆蛇行临界速度计算模型Fig.2 Calculation model of critical speed of vehicle system
通过基于车辆-轨道耦合系统动力学模型的单参数影响规律分析和相关文献的调研,确定影响动车组横向稳定性的车辆系统中关键影响因素集,如表1所示。因素集中各参数的影响曲线如3所示。
由图3可知影响因素与车辆横向稳定性的映射关系:
1)抗蛇行减振器阻尼与临界速度的映射关系为
y=3.960 7x+462.93,x≤10%c
y=-0.25x+505.1x>10%c
2)二系横向减振器阻尼变化量与临界速度的映射关系为
y=691.42·e0.0157x,x≤-20%c
y=-0.847 6x+473.71,x>20%c
3)一系纵向定位刚度变化量与临界速度的映射关系为
y=-0.971 4x+380,x≤10
y=-0.22x+364.6,x>10
4)同轴轮径差与临界速度的映射关系为
y=-81.371x+409.9x≤1.3
y=-15.784x+323.32,x>1.3
5)同转向架轮径差与临界速度的映射关系为
y=-26.964x+435.54,x≤3
y=-52.667x+518.36,x>3
6)低阶多边形深度与临界速度的映射关系为
y=-620.34x+449.66
7)高阶多边形深度与临界速度的映射关系为
y=-92.44lnx-61.241

表1 车辆系统横向稳定性关键影响因素集Table 1 Key factors of lateral stability of vehicle system

图3 因素集中单参数对车辆横向稳定性的影响Fig.3 Influence of parameters on lateral stability
由图3可见,抗蛇形减振器阻尼值低于设计值时,车辆的横向稳定性随数值的减小逐渐劣化;高于设计值时,增幅在0~10%范围内二者呈递增趋势,超过之后横向稳定性随抗蛇行减振器阻尼值的增大缓慢减小。当二系横向减振器阻尼值低于设计值20%以上时,车辆横向稳定性随着该阻尼值的减小逐渐劣化,当该阻尼值不低于设计值的80%以上,车辆的横向稳定性较平稳,略有随该值增大而减小的趋势。当一系纵向定位刚度值低于设计值的1.1倍时,车辆横向稳定性随该值的减小略有增大,当该值超过设计值的1.1倍后,车辆的横向稳定性基本保持平稳。车辆横向稳定性随轮径差(同轴、同架)的增大而逐渐劣化,劣化速率分阶段略有差别,对同轴轮径差,差值在(0~1.5) mm时劣化速率较大,而后劣化过程较平缓;对于同架轮径差,(0~3) mm段的劣化速率较缓,超过3 mm后的劣化速率较大。车轮多边形对车辆横向稳定性的影响取决于多边形阶数和深度,低阶多变形对车辆横向稳定性的影响较小,高阶多边形对其影响显著,劣化速率高。基于单参数对车辆横向稳定性的影响规律,本研究确定了单参数的安全阈值,如表2所示。

表2 单参数阈值Table 2 Threshold value of single parameter
注:(A)+表示不低于(A)的值,(A)-表示不高于(A)的值。
2 车辆横向失稳辨识方法研究
车辆横向失稳是由于车辆在运行过程中,车轮、悬挂、轨道线路等关键部件的状态逐渐退化导致。部件状态退化导致车辆振动响应劣化,车辆振动响应劣化后进一步导致部件状态退化。通过车辆系统动力学,分析部件状态退化引起车辆横向失稳的失效链路,根据失效链路的特征,基于车辆振动信息辨识车辆横向失稳的原因。
2.1 车辆横向失稳的失效链路分析
服役过程中,二系横向减振器和抗蛇行减振器常常出现减振器漏油和橡胶节点硬化两类故障,这两类故障会导致减振器阻尼减小;二系减振器阻尼减小导致构架和车体枕梁横向加速度传递异常,当横向加速度异常达到一定程度时,就导致了转向架横向失稳。
随着运营里程的增加,由于车轮偏心或轮对结构模态[9]等多种复杂原因,车轮多边形逐渐产生,当车轮多边形深度超过限值时,会导致构架横向加速度增加,横向加速度会产生的特征频率。
随着运营里程的增加,车轮磨耗会导致车轮踏面外形变化,轨头廓形也会逐渐变化,轮轨接触几何关系改变,导致轮对异常振动,进一步传递给轴箱,再传递给构架,导致车辆横向失稳。
在车轮磨耗时,轮径差、线路不平顺同时产生,当轮径差与线路不平顺超过限值时,也会导致轮对、轴箱和构架的横向异常振动。
车辆横向失稳的失效链路如图4所示。
2.2 基于加速度信息的车辆横向失稳原因辨识
根据车辆横向失稳的失效链路分析,基于可检测获得的车辆系统轴箱、构架和车体加速度信息,反向辨识车辆横向失稳的原因。
1)当车辆发生横向失稳时,进一步结合失稳特征辨识车辆横向失稳的原因;
2)当构架和车体振动传递比异常(与本车历史传递比相比)时,则判断二系横向减振器或抗蛇行减振器故障导致了横向失稳;
3)当构架横向失稳,且同时出现多边形特征频率f时,则可指导检查车轮多边形深度是否超限,可能是车轮多边形导致的横向失稳;
4)当车轮、轴箱和构架均出现异常振动,则是轮轨接触几何关系异常,导致了车辆横向失稳;同时由于踏面外形对轮轨几何关系的影响最甚,结合车轮磨耗规律,可判断是踏面外形或轮径差导致的车辆横向失稳;通过不同线路的振动数据分析,当同车不同线路振动不同时,可判断由于线路状态异常导致车辆横向失稳。
车辆横向失稳辨识方法如图5所示。
横向失稳原因辨识步骤:
1)提取轴箱、构架和车体横向加速度;
2)对构架加速度进行滤波,判断其是否出现横向失稳;
3)对测点加速度信息进行时域统计或频域分析,提取时域统计值,提取主频频率和幅值;
4)分析其统计特征值及主频与刚镟修后的统计特征值及主频的区别;
5)判断横向失稳原因:根据构架和车体枕梁的统计特征值传递关系判断抗蛇行减振器或二系横向减振器的阻尼减小导致车辆横向失稳;根据轮对和构架的统计特征值传递关系融合轨道线路历史振动信息,判断车轮异常磨耗导致车辆横向失稳;根据多边形特征频率和幅值,判断其失稳原因为车轮多边形引起的失稳。
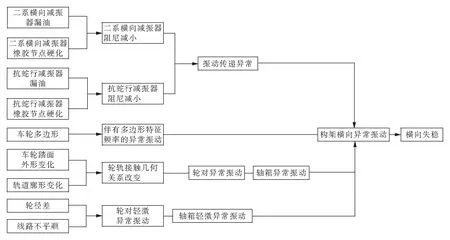
图4 车辆横向失稳失效链路Fig.4 Failure chain of vehicle lateral instability

图5 车辆横向失稳原因辨识方法Fig.5 Identification method of vehicle lateral instability
3 实例
已获得某型动车构架横向加速度,其加速度时域信息如图6所示。采用10 Hz低通滤波,并根据UIC515标准判断,如图7所示,车辆已横向失稳。
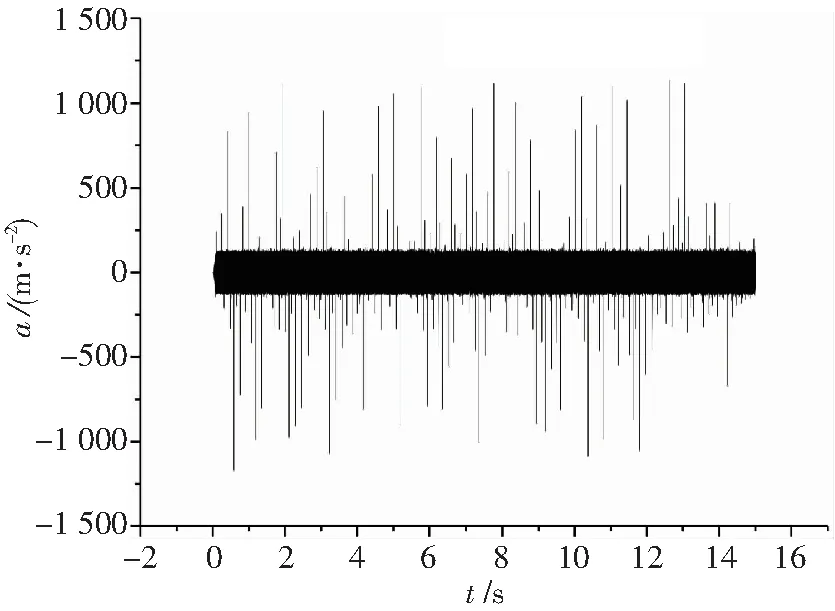
图6 构架加速度时域图Fig.6 Acceleration time domain of frame
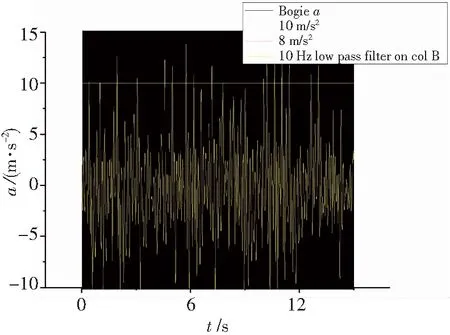
图7 构架加速度失稳判断图Fig.7 Judgment of acceleration instability of frame
根据构架横向加速度数据,进行时域统计,其结果如表3所示,进行频域分析,如图8所示。

表3 加速度统计Table 3 Acceleration statistics m·s-2
与刚镟修后的车辆振动数据相比,横向失稳的构架振动具有特征频率573 Hz,这个特征频率是多边形特征频率,约为20阶多边形,其计算方法是。因此可判断车辆横向失稳的原因是车轮多边形。

图8 频域分析Fig.8 Frequency domain analysis
4 结论
1)基于车辆横向失稳机理,以车辆蛇行临界速度为指标,分析确定了车辆横向失稳的主要影响因素,包括:线路不平顺、抗蛇行减振器阻尼、二系横向减振器阻尼、一系纵向定位刚度、轮径差、车轮踏面外形、车轮多边形、轨头廓形。
2)建立了车辆横向失稳的失效链路,提出了基于失效链路的车辆横向失稳的原因辨识方法,给出了具体步骤和判断条件。
3)结合实例,对车辆横向失稳的原因辨识方法进行了验证,可有效地辨识出车轮横向失效的原因。
[1] 董浩. 铁道车辆运动稳定性及分岔类型研究[D]. 成都:西南交通大学,2014:53-55.
[2] 贾璐. 高速车辆动力学性能评价方法研究[D]. 成都:西南交通大学,2011:40-42.
[3] 贾璐,曾京,刘转华,等. 五种横向运动稳定性评价方法研究[J]. 机械设计与制造,2012(10):219-221.
[4] 陈政南,张天婴,张树鹏. 铁路工程车辆横向失稳动力学特征分析[J]. 铁道机车车辆,2011,31(3):8-12.
[5] 田光荣. 铁路货车蛇行失稳评判限值的研究[J]. 中国铁道科学,2016,37(5):87-93.
[6] 甘敦文. 基于贝叶斯聚类的高速列车横向稳定性识别方法及其实时在线监测装置[J]. 中国铁道科学,2016,37(4):139-144.
[7] 张雪珊,肖新标,金学松. 高速车轮椭圆化问题及其对车辆横向稳定性的影响[J]. 机械工程学报,2008,44(3):50-56.
[8] 吕可维. 车辆系统非线性动力学问题研究[D]. 成都:西南交通大学,2004:36-39.
[9] 李伟,李言义,张雄飞,等. 地铁车辆车轮多边形的机理分析[J]. 机械工程学报,2013,49(18):17-22.
Identification Method of Lateral Instability Reason of EMU Train
CHEN De-sai1,WU Hua-li2,*
(1.ChengduNo.7HighSchool,Chengdu610041,China;
2.StateKeyLaboratoryofTractionPower,SouthwestJiaotongUniversity,Chengdu610031,China)
Lateral stability is a safety evaluation indicator of railway vehicles. Lateral instability happened to a type of EMU trains for several times. By failure chain analysis, three causes of lateral instability were identified. Based on the abnormal vibration of wheel-sets, axle box and frame as well as the line information, the wheel wear was identified as a main reason of lateral instability. Based on the transmission relationship of vibration from frame to beam of body, the decrease of damping value of the anti-snake damper or lateral damper was identified as a main reason of lateral instability. Based on the polygon feature frequency of frame vibration, the polygon wheels were identified as a main reason of lateral instability. The identification method of lateral instability was applied, which provided a reference for identifying the lateral instability reason of EMU trains.
railway vehicle; lateral instability; influencing factor of lateral instability; failure chain; identification of lateral instability cause
2016年11月5日
2017年1月20日
高速铁路系统安全保障技术(2016YFB1200401)
吴华丽(1992年-),女,硕士研究生,主要从事车辆系统故障诊断与健康预测理论方法等方面的研究。
U266
A
10.3969/j.issn.1673-6214.2017.01.002
1673-6214(2017)01-0007-06
