基于PLC船用锅炉汽包水位控制系统的仿真与监控
2017-06-05陈文秀薛士龙张亚明
陈文秀, 薛士龙, 孙 磊, 张亚明
(上海海事大学 物流工程学院, 上海 201306)
基于PLC船用锅炉汽包水位控制系统的仿真与监控
陈文秀, 薛士龙, 孙 磊, 张亚明
(上海海事大学 物流工程学院, 上海 201306)
以船用锅炉汽包水位为研究对象,给出了水位的控制方法及数学模型,并运用Matlab软件进行建模与仿真。在此基础上,采用S7-400为主控制器,构建了船用锅炉汽包水位控制系统。在PCS7的软件环境下编写了控制软件,在上位机软件WinCC中设计了监控界面,实现了汽包水位控制系统的控制与监控。系统仿真结果分析证明该方法是可行的。
锅炉; 汽包水位; 水位控制; 稳定性
船用锅炉是船舶上重要的动力装置,也是最早实现自动控制的装置之一。船用锅炉控制系统主要包括汽包水位控制、燃烧控制、锅炉点火时序控制等[1-2]。汽包水位控制系统是其中一个重要的子系统。汽包水位控制是为了保持汽包水位稳定在一定范围内,水位的高低将直接影响着出口蒸汽的品质以及整个锅炉的安全[3-4]。因此,研究锅炉汽包水位控制系统具有着重要的意义。
船舶锅炉包括辅锅炉和废弃锅炉。正常情况下,它们之间的影响较小[5],故本文的研究不考虑废弃锅炉对汽包水位的影响。为了维持汽包水位的稳定,常采用单冲量、双冲量以及三冲量3种控制方法[6]。① 单冲量水位控制是将汽包水位作为唯一的被控变量。控制方式简单,适用于不很严重的“虚假水位”情况,在出现水位大幅度波动时,控制效果不佳。② 双冲量水位控制是将汽包水位作为被控变量,将蒸汽流量作为干扰变量;与单冲量控制法相比较,增加了前馈控制回路,实现前馈反馈控制。当蒸汽流量波动时立即控制,不需要等由于扰动引起的水位出现偏差后才进行控制,从而削弱或抵消了由于“虚假水位”现象产生的不利动作。③ 三冲量水位控制是将水位作为主控制变量,将给水流量作为副回路控制变量,将蒸汽流量作为前馈控制变量,实现前馈串级控制;与双冲量控制法相比较,将给水量的扰动作为串级控制的副回路。因此,三冲量控制法既能够克服给水扰动的影响,也适用于“虚假水位”的情况[7-8]。
目前国内水位控制系统中,可编程控制器PLC应用十分广泛。西门子的S7-400系列PLC,属于中高档性能的PLC,具有强大的通信联网能力,应用非常灵活[9]。因此,本设计选用了S7-400PLC作为系统的控制器,同时采用西门子WinCC软件设计了监控界面,对汽包水位控制系统进行监控。
1 汽包水位控制系统建模与仿真
1.1 数学建模
本文以一艘某6万t油轮辅锅炉为原型[10],离散化后在Z域(离散域)中,给水扰动下的汽包水位脉冲传递函数为[11]
GW(z)=
(1)
式中,ε为反应速度,对于中压锅炉,汽包水位反应时间一般为30~100 s,故0.01<ε<0.033,本文中ε=0.02;Ts为采样周期,为更精确的效果,本文中,Ts=0.1 s;T2为给水扰动下水位反应时间,本文中,T2=10 s。
将上述参数代入式(1),得到
(2)
离散化后的蒸汽扰动下的水位传递函数为[10-11]:
(3)

(4)
1.2 运用Matlab的水位控制仿真
为了在多变的自然条件下维持汽包水位的稳定,得到最佳的控制效果,本文采用单冲量、双冲量和三冲量3种常用水位控制方法进行比较,并进行参数整定。运用Matlab中Simulink进行汽包水位控制仿真实验。为便于观察“虚假水位”的波动情况,汽包水位值取为0,给水调节阀和蒸汽调节阀的阀门开度系数为0.4。仿真过程中,给水调节阀和蒸汽调节阀的初始值设为20%。
1.2.1 单冲量和双冲量控制比较分析 为了更好地比较出不同控制方法的优劣,将单冲量和双冲量水位控制放在一起对比分析,建立了单冲量和双冲量控制仿真模型,如图1所示。
图2给出了单冲量水位和双冲量水位控制的仿真曲线。由图可见,双冲量控制的响应曲线超调量远小于单冲量控制,同时调节时间更短,能够很快恢复稳定状态;双冲量控制下,在模型、参数相同的情况下,当反馈系统Kc=0.3时,系统的超调量最小,稳定速度较快,很好地控制了水位。因此,当只有蒸汽扰动的情况下,Kc=0.3时,双冲量水位控制的效果最佳。
1.2.2 双冲量与三冲量水位控制比较分析 在蒸汽调节阀从20%开度阶跃至50%开度、给水调节阀从20%阶跃到30%的情况下,建立双冲量和三冲量控制仿真模型,如图3所示。
取Kc=0.3,经过整定后,主控制器PID参数为[8.7,0.2,0]。图4给出了Kc=0.3时,双冲量与三冲量水位控制的仿真曲线图。由图可见,三冲量控制的超调量更小,响应速度快,稳定时间短,整体控制效果最佳。

图1 单冲量和双冲量仿真模型图
Fig.1 Diagram of single-impulse and double-impulse simulation models
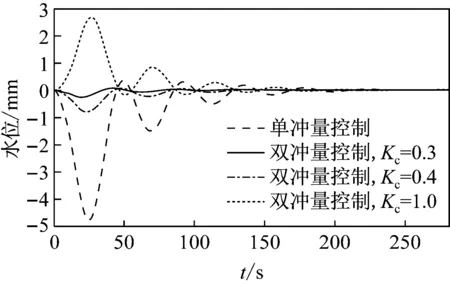
图2 单冲量和双冲量模型的仿真曲线图
上述仿真实验表明,三冲量水位控制法能够有效地控制由蒸汽流量以及给水流量带来的扰动,适用于“虚假水位”。本文采用三冲量水位控制,并通过软、硬件设计实现该控制方法。
2 硬件设计
2.1 控制系统组成
网络结构分为操作监控层、PLC控制层以及现场层[12]。操作监控层由工程师站和操作员站组成;操作监控层与PLC控制层通过工业以太网实现通信;PLC控制层与现场层通过现场总线Profibus-DP实现I/O的通信[13]。船用锅炉汽包水位控制系统框图如图5所示。
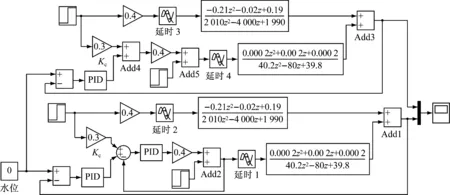
图3 双冲量和三冲量控制仿真模型图
Fig.3 Diagram of double-impulse and three-impulse control simulation models

图4 双冲量和三冲量模型的仿真曲线图
Fig.4 Graph of double-impulse and three-impulse model simulation

图5 船用锅炉汽包水位控制系统框图
Fig.5 Block diagram of a marine boiler drum water level control system
2.2 硬件的选型
船用锅炉汽包水位控制系统选用了SIMATIC S7-400PLC。CPU选择S7-400系列CPU412-3H,电源模块为PS407 10A,通信模块为CP443-1,以及分布式I/O模块ET200M。
3 软件设计
3.1 主要功能软件设计与实现
采用S7-400PLC作为系统的控制器,运用PCS7编程软件,编写了连续功能图(Continuous Function Chart,CFC)。为了便于理解,简化得到三冲量水位控制副回路功能框架图,如图6所示。图中包含PID控制模块、模拟量输入与输出模块、加法器、乘法器等主要模块。通过模拟量输入模块得到蒸汽流量、给水流量的测量值,通过模拟量输出模块将控制信号输送到给水调节阀,调节阀门开度。蒸汽流量经乘法器得到反馈信号,与水位控制器的输出信号共同输入到加法器。加法器的输出信号作为给水流量控制器的设定值,将给水流量的测量值送到给水流量控制器中,最终由给水流量控制器输出信号作用于给水调节阀。实现三冲量水位控制,即前馈串级控制。

图6 三冲量水位控制副回路功能框架图
3.2 WinCC监控界面设计
WinCC最大的特点是能与各种软件和用户程序组合在一起,建立友好的人机界面,满足实际需要;且WinCC功能较齐全,有着大量的设置项目、菜单选项和可视化窗口,采用画面分层管理,使用灵活便捷[14-16]。
本文在上位机软件WinCC上设计了汽包水位控制系统的监控画面图,为了保证船舶锅炉系统的完整性,增加了废气锅炉、热水井等设备。如图7所示。设计了主要变量的显示画面,可以直接观察到各变量的情况,进行实时监控。

图7 WinCC监控画面图
由图8所示为WinCC实时曲线监控画面。从图可见,在增加蒸汽流量扰动以及给水扰动的情况下,响应速度很快,同时超调量小,控制效果良好,汽包水位基本上维持在合理范围内。

图8 WINCC曲线监控画面图
4 结 语
本文对船用锅炉汽包水位进行建模仿真,根据仿真结果,得出了控制方法最佳的反馈系数以及PID参数值。采用S7-400PLC实现了水位控制方法,确保了系统的稳定性和良好的响应特性,可以运用在相关领域。
[1] 曾龙斌.虚实结合船舶辅锅炉模拟训练系统 [D].厦门:集美大学,2015:1-2,7.
[2] 杨伟才.浅析锅炉PLC控制系统 [J].科技创新与应用,2015(33):137.
[3] 时俊.锅炉汽包水位串级三冲量PID控制系统的设计 [J].内蒙古石油化工,2011(23):72-73.
[4] 迟立新.锅炉汽包水位动态特性与给水控制 [J].科技信息,2013(11):396,420.
[5] 林文城.船用废气锅炉自动控制系统的设计 [J].船电技术,2014,34(3):19-21.
[6] 兰鹏.浅析锅炉汽包水位的自动化控制 [J].中国新技术新产品,2015(7):19.
[7] 张明.汽包锅炉给水控制系统的设计 [J].山东工业技术,2016(5):74.
[8] 乔金宇.基于MATLAB/SIMULINK的锅炉汽包水位控制策略及仿真分析[D].兰州:兰州理工大学.2012:5-13.
[9] 张云翔.浅析S7-300/400系列PLC [J].科技致富向导,2011,(36):79.
[10] 赵志斌.轮机模拟器中蒸汽系统的仿真研究 [D].大连:大连海事大学.2001:9,26-40.
[11] 董良雄.船用增压锅炉水位监控装置的研制 [D].武汉:武汉理工大学.2007:11-25.
[12] 郭帆,曹宏涛,王华强,等.基于PCS7的加热炉自控系统 [J].工业仪表与自动化装置,2014(4):62-65.
[13] 张芳杰.基于西门子PCS 7的加热炉炉温预测控制 [D].呼和浩特:内蒙古科技大学,2012:37-40.
[14] 李文博.锅炉控制系统设计及其在PCS7上的实现 [D].北京:北京化工大学,2010:53.
[15] 杨新达.基于WinCC的铝粉氮气雾化分级过程监控系统设计 [D].大连:大连理工大学,2009:11-13.
[16] 李永泰,孙洪程.工业加热炉控制方案的WinCC平台实现 [J].仪器仪表用户,2010,17(6):72-74.
Simulation and Monitoring of Drum Water Level Control in Marine Boiler Based on PLC
CHENWenxiu,XUEShilong,SUNLei,ZHANGYaming
(Logistics Engineering College, Shanghai Maritime University, Shanghai 201306, China)
This paper studies the drum water level of a ship. A control method and mathematical model were given, and Matlab was used for modeling and simulation. On this basis, a water level control system of marine boiler drum was constructed with S7-400 as the main controller. The control program was written using the software PCS7, with the monitoring interface developed in a PC with WinCC. Control and monitoring were achieved for drum water level control. Analysis of the simulation results show feasibility of the method.
boiler; drum water level; control of water level; stability
2017 -03 -02
国家自然科学基金面上项目资助(61673260)
陈文秀(1993-),女,硕士生,主要研究方向为船舶与港口电气控制技术与系统, E-mail:blanche_chen1993@126.com
2095 - 0020(2017)02 -0098 - 05
U 664.111
A