基于嵌入式机器视觉的水稻秧盘育秧图像无线传输系统
2017-06-05谭穗妍董文浩鹿芳媛李倍旭
谭穗妍 马 旭 董文浩 鹿芳媛 李倍旭
(1.华南农业大学电子工程学院, 广州 510642; 2.华南农业大学工程学院, 广州 510642)
基于嵌入式机器视觉的水稻秧盘育秧图像无线传输系统
谭穗妍1马 旭2董文浩2鹿芳媛2李倍旭1
(1.华南农业大学电子工程学院, 广州 510642; 2.华南农业大学工程学院, 广州 510642)
杂交稻机械化秧盘精密播种育秧过程中需要人工实时监测,以保证秧盘播种性能,为解决传统人工长时间户外、低效的监测方式,设计了基于嵌入式机器视觉的水稻秧盘育秧图像无线传输系统。系统由嵌入式开发平台、无线WiFi网关、高清网络摄像头、红外传感模块、远程服务器等组成。嵌入式开发平台采用Tiny4412开发板,并在其上移植Linux系统、摄像头驱动、GPIO口驱动;采用Qt开发工具,完成图像采集、实时显示,并设计出友好的人机交互界面;利用Jpeglib静态库对图像进行数据压缩;利用无线WiFi局域网、嵌入式系统和远程服务器按照规定的协议通过Socket通信进行数据传输。远程服务器基于Netty框架对采集到的图像数据进行校验、实时显示和保存。试验结果表明,不同分辨率图像的无线传输速率均满足育秧流水线实时作业要求,JPEG格式的图像经过数据压缩,其传输速率大大提高;嵌入式采集终端能够稳定采集播种秧盘图像,并成功地上传到服务器,网络平均丢包率为0.23%,误码率为0.23%。
水稻秧盘育秧; 嵌入式机器视觉; 图像; 无线传输; 系统设计
引言
杂交稻要求低播量精密播种,须保证2~3粒/穴[1-4],以达到1~2株/穴的精准栽插,实现机械化种植的优质高产。试验发现,播种装置的结构影响其播种性能[5-6],而且播种器播种性能与水稻种子的物理特性密切相关[7]。水稻种子通常是在浸种催芽后播种,播种期间种子物理特性如含水量和种芽长度的变化,或是更换不同品种种子时,都会影响播种器的播种性能。因此,在秧盘育秧播种现场需安排劳动人员监视秧盘播种性能变化情况,当发现播种性能异常时,需中断播种过程,通过人工调节播种器的工作参数来保持播种量恒定,人工监测和调节播种量成为制约水稻育秧流水线播种效率提高的重要因素;同时,育秧播种环境恶劣,例如在南方双季稻区,早稻期间,气候潮湿寒冷,晚稻期间,气候高温炎热;人工监测由于疲劳而准确性下降,影响播种性能。随着现代化技术及信息化水平的不断提高,智能监控越来越多地取代人工低效率的传统监测,在自动化与机械化的水稻育插秧作业中将发挥重要作用。
目前嵌入式机器视觉系统和图像无线传输技术在水稻育秧流水线作业中的应用刚刚起步,国内外已有学者应用上述技术实现远程精准农业的作业监控[8]。陈海涛等[9]开发嵌入式Linux图像采集系统和3G无线传输的灌区灌溉设施及农作物图像采集器。文献[10-14]基于ARM技术和GPRS技术实现畜禽类如鸡舍、猪舍等环境的无线监控系统。王健等[15]以Tiny210嵌入式开发板为核心,通过网络摄像头和WiFi网关实现无人机视频采集与传输。本文设计以嵌入式开发平台Tiny4412、红外传感模块、网络高清摄像头、远程服务器组建的水稻育秧流水线播种秧盘图像无线传输系统,利用WiFi网关,嵌入式系统和远程服务器按照规定的协议通过Socket通信进行数据传输,以实现秧盘图像无线传输,并存储在远程服务器进行水稻秧盘播种量分析[16]。
1 系统总体方案设计
系统硬件结构框图如图1所示,基于嵌入式机器视觉水稻秧盘图像无线传输系统由Tiny210嵌入式开发平台、红外传感模块、无线WiFi网关、高清网络摄像头和远程服务器等组成。
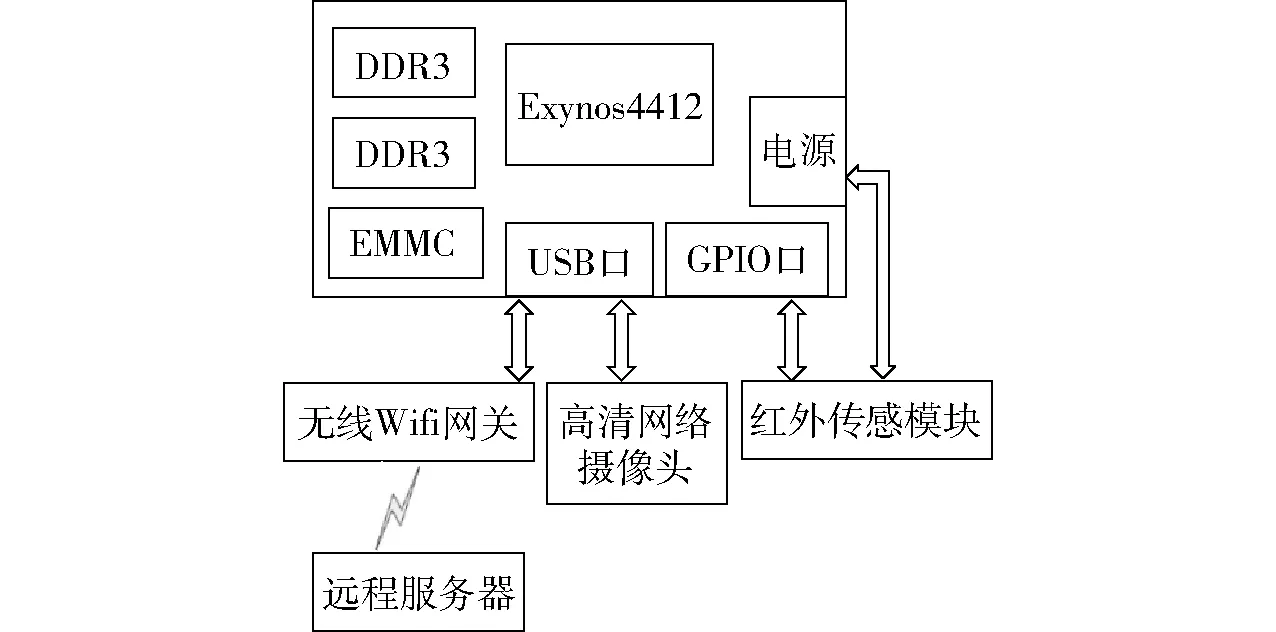
图1 系统硬件结构框图Fig.1 Block diagram of nursery plug tray images wireless transmission system
基于嵌入式机器视觉水稻秧盘图像无线传输系统安装在华南农业大学工程学院研制的2SJB-500型精密育秧播种流水线上[17],系统如图2所示。系统设置在秧盘播种器与覆土装置之间。首先将红外传感模块安装在摄像头前端,用于检测是否有秧盘到达拍摄区域;当检测秧盘到达拍摄区域后,嵌入式开发系统通过GPIO口接收红外传感模块信号,系统根据设定参数采集并保存一定数量的秧盘图像,同时嵌入式系统实时显示育秧流水线的播种秧盘图像;通过无线WiFi网关,嵌入式系统和远程服务器利用Socket通信按照规定协议进行数据传输。远程服务器基于Netty框架对采集到的图像数据进行校验、实时显示和保存。为获取高对比度的清晰图像,在拍摄区域上安装光箱,光箱中安装4块高亮度的LED面光源。
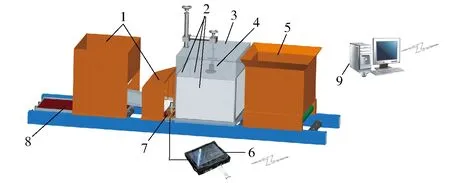
图2 嵌入式机器视觉育秧秧盘图像无线传输系统示意图Fig.2 Schematic of nursery plug tray images wireless transmission system based on embedded machine vision1.播种器 2.LED照明 3.光箱 4.摄像头 5.覆土装置 6.嵌入式开发系统 7.红外传感模块 8.秧盘 9.远程服务器
2 系统功能模块设计
2.1 系统硬件设计
(1)Tiny4412嵌入式开发平台
基于嵌入式机器视觉水稻秧盘图像无线传输系统采用广东友善之臂计算机科技有限公司的Tiny4412型嵌入式开发板作为核心板。Tiny4412是一款高性能的四核Cortex-A9 核心板,采用三星Exynos 4412 Quad-core作为主处理器,运行主频1.5 GHz,内置ARM Mali-400双核GPU;支持1080p硬件解码视频播放,支持视频格式MPEG4、H.263、H.264;配备1 G的DDR3内存,4 G Flash大容量存储,7寸高清电容触摸屏。
(2)高清网络摄像头
高清网络摄像头采用罗技C270,具有自动对焦功能的卡尔蔡司镜头,最高帧速可达30帧/s,可支持640像素×480像素、960像素×544像素、1 280像素×720像素等多种分辨率图像;支持多种图像输出格式,如YUYV、RGB等。
(3)红外传感模块
红外传感模块由发射器和接收器组成,其工作原理是:发射器发出的红外光线直接进入接收器,当传送带上运动的秧盘经过发射器和接收器之间并阻断光线时,光电模块的输出电平会发生变化。红外传感模块与嵌入式系统的GPIO口连接,嵌入式系统通过扫描GPIO口的变化电平信号,触发图像采集。
(4)无线网络
系统利用WiFi网关和局域网实现无线通信,无线网卡采用TP-LINK WN322G+,使用USB接口连接,具有热插拔和即插即用的特性,无线网卡基于802.11ag协议,兼容 802.11b标准,传输速率达54 Mb/s,满足高速率的图像传输要求。
2.2 系统软件设计
2.2.1 嵌入式系统软件总体设计
嵌入式机器视觉软件系统以嵌入式Linux系统和Qt图形用户界面库为基础。嵌入式Linux系统的移植包括Bootloader移植、内核制作与移植、根文件系统制作与移植和摄像头与GPIO口驱动移植[18]。在Linux系统移植基础上,基于Qtopia 2.2.0开发应用软件包括红外传感模块信号的GPIO口扫描、摄像头图像采集、图像压缩和显示、友好的用户交互界面和图像无线传输,Qtopia 2.2.0是基于Qt开发的一个软件平台[19]。软件总体工作流程如图3所示,系统启动后手动设置图像采集和传输参数,点击启动按钮,程序初始化摄像头、初始化GPIO口、连接服务器,然后启用3个线程。线程1负责读取摄像头的图像,然后把读取的图像进行图像压缩,存入队列1。线程2从队列1中读取图像,然后把图像在嵌入式开发板屏幕中实时显示出来。接着读取GPIO口信号,如果检测到信号则把当前图像存入队列2,交给线程3。线程3从队列2中读取图像,然后按照无线传输协议把图像封装成数据包发送到远程服务器。
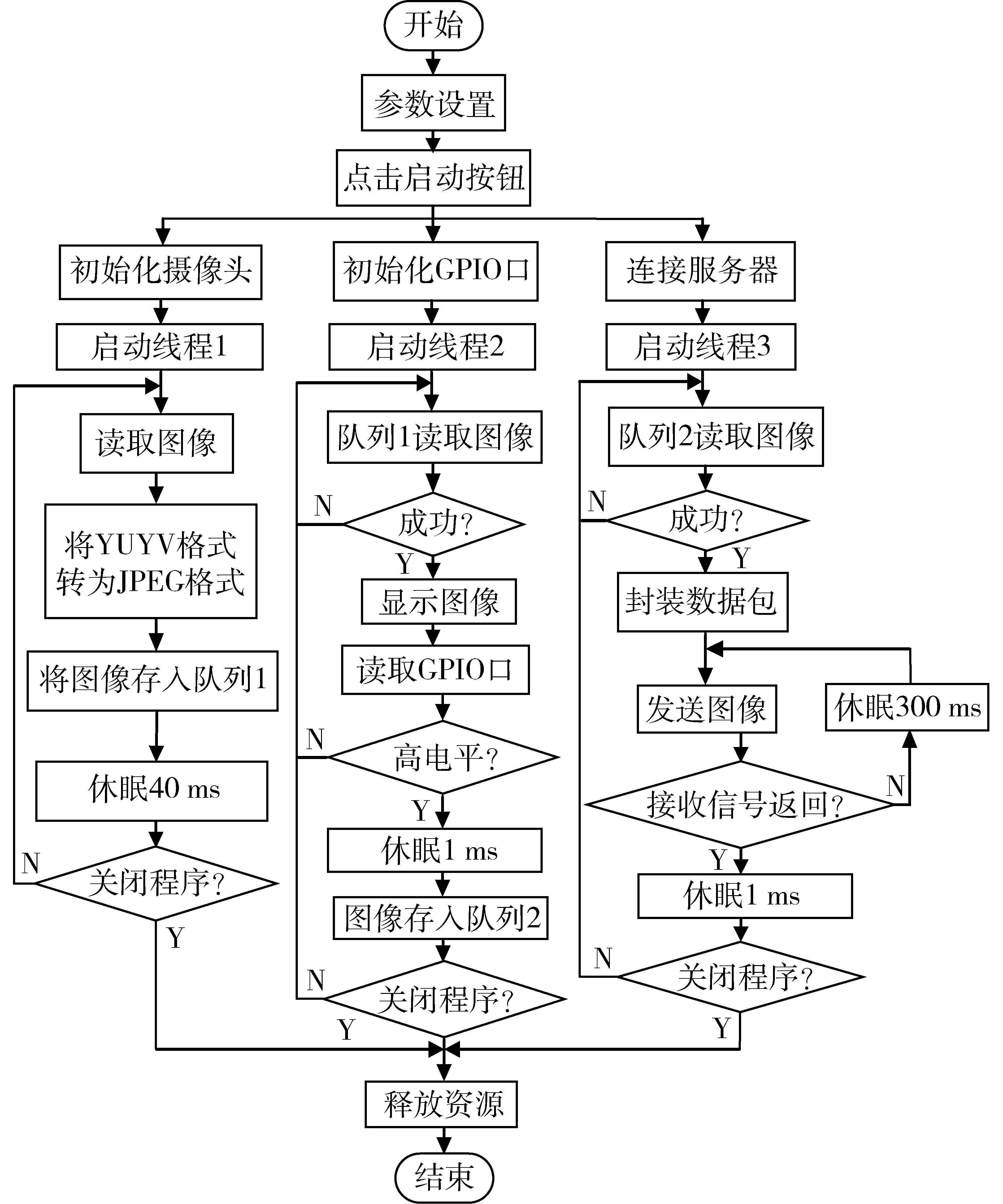
图3 嵌入式机器视觉育秧秧盘图像无线传输系统流程图Fig.3 Flow chart of nursery plug tray images wireless transmission system based on embedded machine vision
2.2.2 图像采集和图像压缩
V4L2(Video for Linux 2)是Linux系统操作视频设备的标准,是视频采集的应用程序编程接口(API),为视频设备驱动程序提供统一接口[20-21]。系统通过调用内核视频采集驱动V4L2的函数接口,进行图像帧采集。V4L2可实现对视频设备的基本操作,包括开、读、写、关。内存映射和中断实现函数ioctl都被封装在结构体中,当对视频图像设备进行读写等操作时,内核通过访问结构,调用相应操作所需函数即可。
由于嵌入式系统采集得到的图像数据格式是YUYV,图像显示前必须进行图像格式转换,将YUYV格式转换为QPixmap支持的BMP格式[22]。但BMP图像格式数据比较大,为提高网络传输速度,可以在无线传输前将图像压缩,减小数据量。本文采用算法复杂度相对较低的JPEG压缩方式,利用基于离散余弦变换的图像压缩算法,首先把二维图像数据进行离散余弦变换,并进行量化,然后进行“Z”字型编码、行程编码和熵编码,结合编码后的数据和JPEG标志信息,生成JPEG数据。Jpeglib压缩库是一个开源代码库,调用其接口函数可以实现基于JPEG算法的图像压缩。在进行图像压缩前设置如下参数:①申请和初始化JPEG压缩对象,初始化错误处理器。②设置压缩图像输出的内存地址。③设置图像的长和宽。④设置彩色位图和空间。⑤设置图像的压缩质量。完成设置后对每一行的图像进行扫描压缩,并返回图像地址与图像大小。
2.2.3 GPIO子系统
Linux系统通过统一的接口来操作GPIO口,编写相应的GPIO口内核驱动,可实现对GPIO口操作,驱动程序中包括GPIO口申请、输入输出方向控制、中断申请、中断边沿触发方式设置、导出GPIO口和释放GPIO口资源等函数。把GPIO内核驱动编译成模块,加载到Linux内核中,通过向/sys/class/gpio/export中写入GPIO编号,GPIO口将被导出到用户空间,并生成/sys/class/gpio/gpioN文件夹。通过读写/sys/class/gpio/gpioN文件中的direction、value和edge文件可以设置或读取GPIO的输入输出方向、电平值和中断触发方式。
2.2.4 基于Qtopia秧盘图像采集软件界面
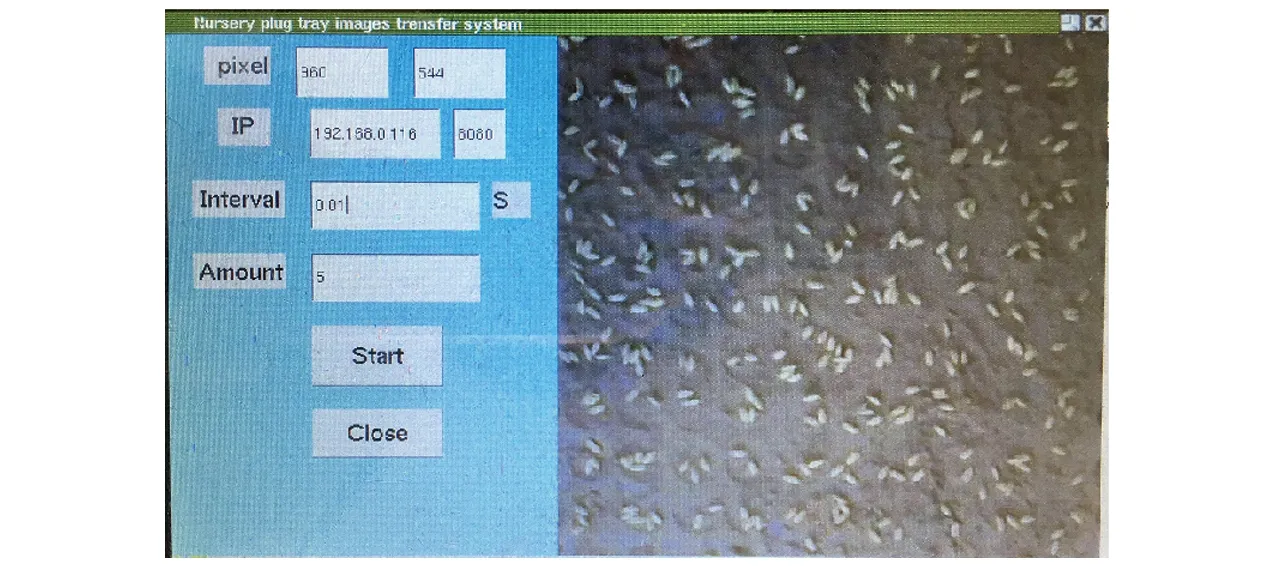
图4 育秧秧盘图像采集软件界面Fig.4 Software interface of capturing nursery plug tray images
秧盘播种图像采集程序功能包括参数设置,图像采集以及图像显示。利用Qt提供的可视化界面设计工具Qtopia来开发应用程序的界面组建。首先添加4个Line Edit控件,用于接收用户设置的参数,包括图像采集分辨率(Pixel)、连接服务器端IP地址和端口(IP)、采集每幅图像的间隔时间(Interval)和每次采集图像的数量(Amount)。然后添加5个Text Label 控件用于显示标签,添加1个QPainter类用来执行屏幕绘制的操作,实现屏幕中图像显示和刷新。最后添加2个Push Button按钮控件,用来启动图像采集和关闭程序。图4为育秧秧盘图像采集软件界面。
2.2.5 无线传输协议设计
使用TCP/IP协议建立嵌入式图像采集终端与远程服务器之间图像信息的连接通信,并根据实际应用中具体的需求定制了网络传输协议。嵌入式秧盘图像采集终端和远程服务器间传输的信息主要为播种秧盘图像信息和控制命令信息,传输信息遵循图5的报文格式。

图5 无线传输信息的报文格式
Fig.5 Wireless transmission message format
其中图像大小为32位无符号整型,表示图像数据的字节长度。图像序号为32位无符号整型,由客户端负责从0开始递增,每幅图片具有唯一的序号。CRC校验位为循环冗余校验码,具有传输数据校验功能。循环冗余校验是常用差错控制法中的一种,其校验工作方式为:运用生成的多项式g(x)去除要发送的m位二进制数据f(x),并将相除结果的n位余数作为CRC校验码附在数据f(x)后,构成一个新的m+n位二进制码发送出去;接收时,先用同一个多项式g(x)去除传送过来的新二进制数据,若余数为0,说明数据正确,若余数不为0,说明传输过程中数据出现错误,要求发送方重新发送。数据位为4个字节长度,固定为0x0A、0x0B、0x0C、0x0D,用于在传输过程中对数据包进行分割。
系统的通信方式采用Socket同步阻塞通信[22],建立1个连接需要经过3次握手。第1步嵌入式系统采集终端发起连接,第2步远程服务器回复确认信息,第3步采集终端再次发送确认信息,然后连接建立,采集终端的Socket通信利用QT中的QSocket实现。
2.2.6 基于Netty框架的远程服务器监控软件设计
远程服务器基于JBOSS的JAVA开源框架Netty实现Socket通信[23]。Netty可以实现异步通信,事件驱动的网络应用程序框架,满足网络通信中高并发的要求。利用Netty框架搭建服务端,设置0x0A、0x0B、0x0C、0x0D为数据分割标志、监听端口,等待采集终端的连接。采集终端发起并建立连接后,开始发送数据。服务器接收数据,对数据包的前3个字段内容做CRC校验,如果校验通过,立即给采集端回复确认信息,回复信息的格式为:图像序号+数据位。接着对数据包进行解析,服务器对解析出来的图像数据调用JAVA基础类Image显示图像,然后使用文件输出流将二进制图像数据以JPEG的格式保存在本地存储中,图6为服务器监控流程图。
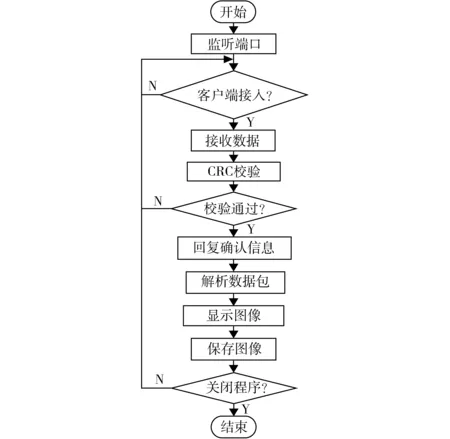
图6 服务器监控流程图Fig.6 Flow chart of sever monitor
3 系统测试和结果分析
3.1 水稻育秧秧盘图像无线传输系统的测试方案
精密育秧播种流水线对水稻秧盘进行精密播种作业,育秧秧盘采用规格为29穴/列×14穴/行,尺寸为580 mm×280 mm×30 mm。调整摄像头高度,可调节拍摄秧盘的视窗范围。流水线工作速度设置为500盘/h,当红外传感模块检测秧盘到达拍摄区域后,嵌入式系统控制摄像头每2 s拍摄1幅图像,每个秧盘采集3幅图像,采集的图像序列如图7所示。远程服务器通过WiFi网关接收嵌入式系统的图像文件。系统利用BWMeter宽带测速器对传输图像数据进行分析,得出系统运行的测试结果。
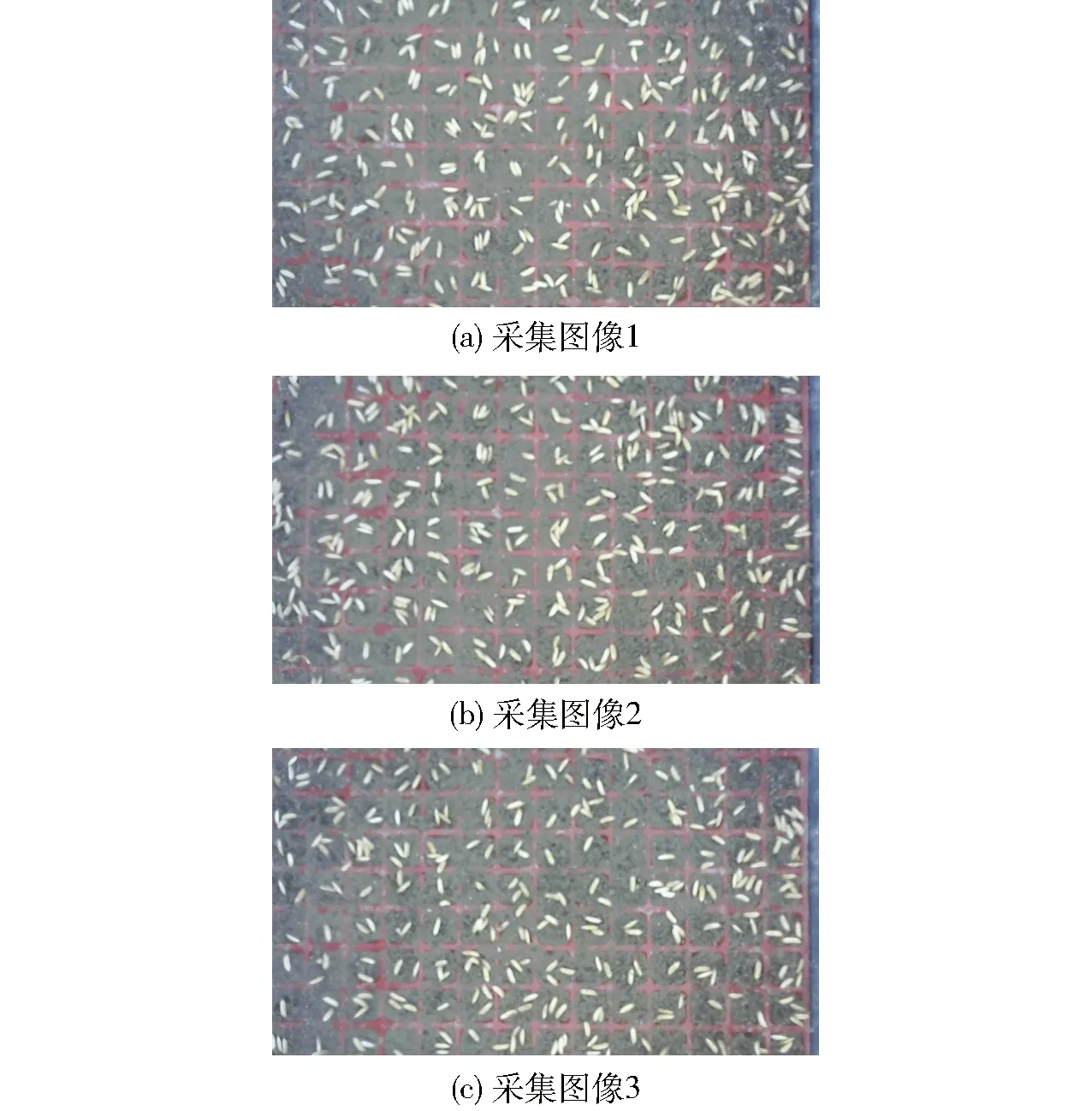
图7 播种秧盘图像实时显示及采集Fig.7 Display and acquisition of nursery plug tray images
3.2 播种秧盘图像无线传输速度试验及结果
流水线上采集播种秧盘图像,每个秧盘采集3幅图像,连续采集30个秧盘,并通过WiFi网关传输到远程服务器,设置帧速率为25帧/s,在网络环境畅通条件下,分别传输未经过压缩的BMP图像和经过数据压缩的JPEG图像,并设置传输不同分辨率的秧盘图像,其传输速度试验结果如表1、表2所示。

表1 BMP图像传输速度测量

表2 JPEG图像传输速度测量
3.3 网络丢包率和误码率试验及结果
嵌入式系统控制摄像头采集秧盘播种图像,远程服务器监测接收并解析图像数据。嵌入式系统对每个分组打包的数据包进行计数,通过WiFi网关把数据包传送到远程服务器,远程服务器对接收的数据包进行计数,并对传输的数据进行CRC校验,如果校验不通过,即计数产生误码。分别设置采集和传输不同分辨率的秧盘图像,每2 s采集1次图像,连续工作监测60 min,测试网络丢包率和数据误码率,其试验结果如表3所示。
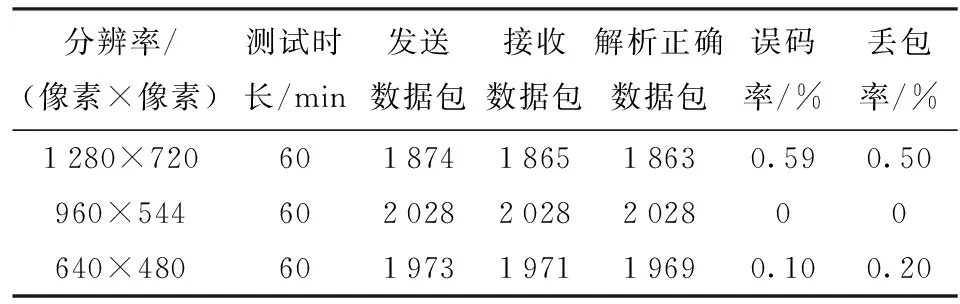
表3 网络丢包率和误码率测量结果
3.4 测试结果分析
(1)在搭建的WiFi网络测试环境中,传输不同数据格式的播种秧盘图像,分别为未经过数据压缩的BMP图像和经过数据压缩的JPEG图像,传输分辨率为640像素×480像素、960像素×544像素、1 280像素×720像素图像时,平均每幅BMP图像传输时间分别为0.45、0.72、1.2 s,传输速率最高达到2.7 Mb/s;平均每幅JPEG图像传输时间分别为30、100、280 ms,传输最高速率为55 kb/s;因为数据传输速率为单位时间内传送数据码元的个数,因此数据传输速率与传输的图像大小有关。两种图像格式的传输速率都满足育秧流水线实时作业要求,JPEG图像格式经过数据压缩,其传输耗时大大降低,且图像质量满足后续播种量检测要求。
(2)试验结果表明,系统中嵌入式采集终端能够稳定采集播种秧盘图像,并成功地上传到服务器,网络平均丢包率为0.23%,误码率为0.23%。
4 结论
(1)设计开发了以嵌入式开发平台Tiny4412、网络高清摄像头、红外传感模块、远程计算机组建的水稻育秧流水线播种秧盘图像无线传输系统;试验结果表明,系统传输两种图像格式的秧盘图像,分别为未经过压缩的BMP图像和经过压缩的JPEG图像,传输速率都满足育秧流水线实时作业要求;嵌入式采集终端能够稳定采集播种秧盘图像,并成功地上传到服务器。
(2)开发的嵌入式机器视觉系统,实现了将通用机器视觉处理程序移植到嵌入式系统中,完成了图像采集和显示功能,开发了友好的人机交互界面,并在远程计算机上监测处理结果,网络平均丢包率为0.23%,误码率为0.23%。此外,通过远程服务器端的秧盘图像接收可实现播种性能的远程检测,为实现远程调控水稻育秧流水线播种量,减少户外恶劣环境下劳动强度和提高劳动效率奠定了基础。
1 徐一成,朱德峰,赵匀,等. 超级稻精量条播与撒播育秧对秧苗素质及机插效果的影响[J]. 农业工程学报,2009,25(1):99-103. XU Yicheng, ZHU Defeng, ZHAO Yun, et al. Effects of broadcast sowing and precision drilling of super rice seed on seedling quality and effectiveness of mechanized transplanting[J]. Transactions of the CSAE, 2009, 25(1): 99-103. (in Chinese)
2 何文洪,陈惠哲,朱德峰,等. 不同播种量对水稻机插秧苗素质及产量的影响[J]. 中国稻米,2008(3):60-62. HE Wenhong, CHEN Huizhe, ZHU Defeng, et al. Effects of different sowing densities on seedling quality and yield of rice of mechanical transplanting[J]. China Rice, 2008(3): 60-62. (in Chinese)
3 于林惠,丁艳锋,薛艳凤,等. 水稻机插秧田间育秧秧苗素质影响因素研究[J]. 农业工程学报,2006,22(3):73-78. YU Linhui, DING Yanfeng, XUE Yanfeng, et al. Factors affecting rice seedling quality of mechanical transplanting rice[J]. Transactions of the CSAE, 2006, 22(3): 73-78. (in Chinese)
4 李泽华,马旭,谢俊锋,等. 双季稻区杂交稻机插秧低播量精密育秧试验[J]. 农业工程学报,2014,30(6):17-27. LI Zehua, MA Xu, XIE Junfeng, et al. Experiment on precision seedling raising and mechanized transplanting of hybridrice under low sowing rate in double cropping area[J]. Transactions of the CSAE, 2014, 30(6): 17-27. (in Chinese)
5 ZHAO Zhan, WU Yafang, YIN Jianju, et al. Monitoring method of rice seeds mass in vibrating tray for vacuum-panel precision seeder[J]. Computers and Electronics in Agriculture, 2015, 114: 25-31.
6 ZHAO Zhan, LI Yaoming, CHEN Jin, et al. Numerical analysis and laboratory testing of seed spacing uniformity performance for vacuum-cylinder precision seeder[J]. Biosystems Engineering, 2010, 106(4): 344-351.
7 陈进,周韩,赵湛,等. 基于EDEM的振动种盘中水稻种群运动规律研究[J]. 农业机械学报,2011,42(10):79-83,100. CHEN Jin, ZHOU Han, ZHAO Zhan, et al. Analysis on rice seeds motion on vibrating plate using EDEM[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(10): 79-83,100. (in Chinese)
8 史国滨,王熙. 农作物图像及温湿度无线远程检测系统设计[J]. 农机化研究,2011,33(4):167-170. SHI Guobin, WANG Xi. Design on crops images and humiture wireless monitoring system[J]. Journal of Agricultural Mechanization Research, 2011,33(4): 167-170. (in Chinese)
9 陈海涛,马孝义,周晓倩,等. 灌区灌溉设施及农作物图像采集器设计[J]. 农机化研究,2014,36(4):117-126. CHEN Haitao, MA Xiaoyi, ZHOU Xiaoqian, et al. Design of an image acquisition device on irrigation facilities and crop in irrigation area[J]. Journal of Agricultural Mechanization Research, 2014,36(4): 117-126. (in Chinese)
10 马亮,腾光辉,李志忠,等. 嵌入式Web服务器在蛋鸡舍网络环境检测系统中的应用[J]. 中国农业大学学报,2006, 11(3):88-92. MA Liang, TENG Guanghui, LI Zhizhong, et al. Application of embedded Web server to environmental information monitoring system for laying house[J]. Journal of China Agricultural University, 2006, 11(3): 88-92. (in Chinese)
11 王玲,王超峰,郑奎. 基于ARM的蛋鸡养殖场网络视频监控系统设计[J/OL]. 农业机械学报,2012,43(2):186-191. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20120236&flag=1. DOI:10.6041/j.issn.1000-1298.2012.02.036. WANG Ling, WANG Chaofeng, ZHENG Kui. Design and implementation of network video surveillance system for laying hens farm based on ARM[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(2): 186-191. (in Chinese)
12 郭侠,沈娣丽,孟雅俊,等. 鸡舍环境无线监控系统的设计及实现[J]. 中国农机化学报,2013, 34(5):243-247. GUO Xia, SHEN Dili, MENG Yajun, et al. Design and implementation of remote monitoring and controlling system in chicken house environment [J]. Journal of Chinese Agriculture Mechanization, 2013, 34(5): 243-247. (in Chinese)
13 周修理,程雪,李艳军,等. 基于ARM的养猪场数据无线传输系统设计[J]. 农业工程学报,2010,26(增刊2):115-119. ZHOU Xiuli, CHENG Xue, LI Yanjun, et al. Design of ARM-based wireless data transmission system of pig farm[J]. Transactions of the CSAE, 2010, 22(Supp.2): 115-119. (in Chinese)
14 马秀莲,衣淑娟. 基于嵌入式系统与机器视觉的上孵前无精蛋识别系统[J]. 农业机械学报,2011,42(5):187-192. MA Xiulian, YI Shujuan. Unfertilized eggs verification system before hatching based on embedded system and machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(5): 187-192. (in Chinese)
15 王健,王林惠,岳学军,等. 基于WiFi的无人机视频传输系统设计与试验[J]. 农业工程学报,2015,31(增刊2):47-51. WANG Jian, WANG Linhui, YUE Xuejun, et al. Design and test of unmanned aerial vehicle video transfer system based on WiFi[J]. Transactions of the CSAE, 2015, 31(Supp.2): 47-51. (in Chinese)
16 谭穗妍,马旭,吴露露,等. 基于机器视觉和BP神经网络超级杂交稻穴播量检测技术[J]. 农业工程学报,2014,30(21):201-208. TAN Suiyan, MA Xu, WU Lulu, et al. Estimation on hole seeding quantity of super hybrid rice based on machine vision and BP neural network[J]. Transactions of the CSAE, 2014, 30(21): 201-208. (in Chinese)
17 马旭,谭永炘,齐龙,等. 水稻秧盘育秧精密播种流水线软硬秧盘自动叠放装置[J/OL]. 农业机械学报,2016,47(3):29-36. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160305&flag=1. DOI: 10.6041/j.issn.1000-1298.2016.03.005. MA Xu, TAN Yongxin, QI Long, et al. Automatic tray stacking device for hard and soft tray of rice precision seeding for nursing seedlings pipeline[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 29-36. (in Chinese)
18 张洪涛,杨名军,葛林,等. 基于ARM嵌入式移动图像监控系统的设计 [J]. 湖北工业大学学报,2013,28(2):35-37,44. ZHANG Hongtao, YANG Mingjun, GE Lin, et al. The design of embedded mobile image monitoring system based on ARM[J]. Journal of Hubei University of Technology, 2013, 28(2): 35-37, 44. (in Chinese)
19 底素然,李黎明,杨伟杰,等. 嵌入式Linux与ARM环境下图像采集与显示[J]. 首都师范大学学报:自然科学版,2013,34(3):3-8. DI Suran, LI Liming, YANG Weijie, et al. Image capture and display based on embedded Linux and ARM[J]. Journal of Capital Normal University: Natural Science Edition, 2013, 34(3): 3-8. (in Chinese)
20 肖德琴,黄顺彬,殷建军,等. 基于嵌入式应用的高分辨率农业图像采集节点设计[J/OL]. 农业机械学报,2014,45(2):276-281. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140246&flag=1. DOI:10.6041/j.issn.1000-1298.2014.02.046. XIAO Deqin, HUANG Shunbin, YIN Jianjun, et al. Development of high-resolution agricultural image capture node based on embedded system[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(2):276-281. (in Chinese)
21 常慕,洪健,李钟慎. 嵌入式机器视觉系统的图像采集及显示技术[J]. 自动化仪表,2010,31(3):18-22. CHANG Mu, HONG Jian, LI Zhongshen. Image acquisition and display technologies for embedded machine vision system[J]. Process Automation Instrumentation, 2010, 31(3): 18-22. (in Chinese)
22 刘超超,彭增起,沈明霞,等. 牛胴体品质检测系统中基于嵌入式Linux的终端设计[J]. 食品工业科技,2012,33(7):336-339. LIU Chaochao, PENG Zengqi, SHEN Mingxia, et al. Design of terminal based on embedded Linux in beef carcass quality measurement system[J]. Science and Technology of Food Industry, 2012, 33(7): 336-339. (in Chinese)
23 龚鹏,曾兴斌. 基于Netty框架的数据通讯服务系统的设计[J]. 无线通信技术,2016(1):46-49. GONG Peng, ZENG Xingbin. Design of the data communication service system based on Netty framework[J]. Wireless Communication Technology, 2016(1): 46-49. (in Chinese)
Design of Rice Nursery Tray Images Wireless Transmission System Based on Embedded Machine Vision
TAN Suiyan1MA Xu2DONG Wenhao2LU Fangyuan2LI Beixu1
(1.CollegeofElectronicsEngineering,SouthChinaAgriculturalUniversity,Guangzhou510642,China2.CollegeofEngineering,SouthChinaAgriculturalUniversity,Guangzhou510642,China)
Because the sowing performance of precision rice seeders is influenced not only by the operational parameters but also by the physical properties of seeds, during the rice seedling nursery process, sowing quantity in plug tray varies from time to time. Therefore, monitoring of sowing quantity by workers is needed. In order to solve the problem that human labor spends much time on working in outdoor environment and its low efficiency, a rice nursery tray images wireless transmission system based on embedded machine vision was designed. The embedded machine vision system was composed of embedded development platform Tiny4412, WiFi gateway, network camera, infrared sensor module and remote computer. The embedded Linux operating system, camera driver, GPIO port driver and network file system configuration were installed in embedded development platform. Applications for the device were programmed with Qt development tool. The applications included image acquisition, real-time images displaying on screen and friendly interactive interface. Jpeglib static library was used to compress the images. Through the WiFi network, embedded system and remote server achieved socket communication in accordance with the provision of protocol data transmission. The remote server achieved collecting, validating, displaying and saving the images based on the Netty framework. The test results showed that the transmission of BMP and the compressed JPEG images could meet the operational requirements of automated rice sowing test line. The transmission rate of JPEG images was greatly improved. The embedded data acquisition terminal could collect stable seeding tray images, and successfully upload to the server. The network average packet loss rate was 0.23% and the error rate was 0.23%. The design of the system laid the experimental platform for the achievement of remote control to the rice sowing quantity of rice sowing test line and the development of embedded-machine-vision-based system for rice nursery trays sowing quantity detection.
rice tray nursery; embedded machine vision; image; wireless transmission; system design
10.6041/j.issn.1000-1298.2017.04.002
2016-07-26
2016-12-11
国家自然科学基金项目(51505156、51275209)、广东省科技计划项目(2014B020207002)和现代农业产业技术体系建设专项资金项目(CARS-01-33)
谭穗妍(1981—),女,博士生,主要从事精准农业和智能农业研究,E-mail: tansuiyan@scau.edu.cn
马旭(1959—),男,教授,博士生导师,主要从事现代农业技术装备研究,E-mail: maxu1959@scau.edu.cn
S223.1+3; TP391.41
A
1000-1298(2017)04-0022-07
