一种多功能腐蚀监测无线传感器设计与实现*
2017-06-01李平安孙小进
李平安,孙小进,罗 坚
(湖南信息职业技术学院 电子工程学院,长沙 410200)
一种多功能腐蚀监测无线传感器设计与实现*
李平安*,孙小进,罗 坚
(湖南信息职业技术学院 电子工程学院,长沙 410200)
提出一种基于射频识别(RFID)的多功能无线腐蚀监测传感器,应用于混凝土的腐蚀情况监测。该传感器由RFID调制解调器、低功率单片机以及低功率三电极恒电位仪组成,由外部RFID读写器供电,且能够进行多种参数测量,包括线性极化、开路电压、温度以及电源电压。该传感器封装在一个尺寸为10.5 cm×4.5 cm×6.2 cm的机箱内。经过混凝土电化学腐蚀电池测试,结果显示提出传感器的性能和精度能够与台式恒电位仪(成本较高且体积较大)相媲美,但体积更小。进行线性极化测量时,提出传感器的实测功率损耗为668 μW。
RFID;腐蚀;混凝土;监测
混凝土钢筋腐蚀是导致混凝土结构过早劣化的主要原因之一[1]。早期腐蚀检测能够及时安排预防性维护措施,以便延长混凝土结构的使用期限,同时降低发生灾难性故障的可能性。
对于腐蚀监测来说,最好采用无损检测方法,主要分为有线和无线两个种类[2-4],传统的监测多采用有线传感器[5]。由于无线混凝土嵌入腐蚀传感器无需使用外露电线,因此相比传统的有线监测,无线腐蚀监测具有更大的优势。考虑到大多数钢筋混凝土结构的使用期限为50年~100年,腐蚀监测传感器无法依靠电池供电。但是,无源传感器能够从四周环境或者通过电感耦合的外部读写器收集能量[6-7]。
基于此,本文提出了一种基于RFID的无源传感器,适用于监测钢筋混凝土结构的腐蚀情况。该传感器能够进行线性极化、开路电势以及温度测量,同时也能够测量自身的电源电压,并将相关信息传送至外部读写器。其电力主要来自于外部RFID读写器。该传感器使用了支持ISO 15693以及ISO 18000通信标准的RFID调制解调器。因此,市场上的商用RFID读写器能够与传感器进行通信。
与其他无线腐蚀传感器不同的是,提出的传感器与读写器之间的通信为全数字化,并使用了循环冗余校验(CRC)以及碰撞检测,以确保从传感器读取的数据不受传输错误的影响。通信方式为双向通信,即能够将数字指令发送至传感器。另外,提出的传感器还能进行多种参数测量,如:线性极化、开路电压、温度以及电源电压。由于传感器内的单片机包含芯片上温度传感器,无需额外硬件成本就能够进行温度测量。经过混凝土电化学腐蚀电池测试,结果显示提出传感器的性能能够与台式恒电位仪(成本较高且体积较大)相媲美。
1 提出传感器的工作原理
图1是提出的基于RFID的腐蚀传感器工作原理图。为了方便显示,图中所示传感器位于钢筋条(钢筋)上方;实际上,传感器距混凝土外表面的距离应与钢筋距表面的距离一样,传感器读数才能与钢筋一一对应。混凝土结构在自然条件下会接触到氯化物、氧气和水,这些物质能够通过混凝土扩散从而进入钢筋。如果氯离子进入钢筋,就会破坏钢材的钝化膜,进而腐蚀钢材[8]。氧气和水能够推动并维持整个腐蚀过程。因此,混凝土钢筋构筑的腐蚀是由于混凝土与钢筋形成的腐蚀电池作用而产生的电化学腐蚀。

图1 提出无线腐蚀传感器的工作原理图
该传感器使用了三电极低功率恒电位仪,用于测量线性极化。恒电位仪能够测量工作电极(WE)与对电极(CE)之间的电流,但是就参比电极(RE)而言,CE的电势经常发生变化。CE是由导电材料制成,所以不会腐蚀。制成CE的典型材料是碳、镍和不锈钢,而本文使用的是碳电极。RE的功能是提供已知稳定的参考电势,本文使用的是氯化银RE。通过绘制CE电势与WE电流关系图可以获得线性极化曲线。从极化曲线中可提取WE的腐蚀状态。如果腐蚀传感器紧挨钢筋,通过WE的腐蚀状态能够较好地预估钢筋的腐蚀状态。
实际应用中,腐蚀传感器持续的时间应该与混凝土结构一样长,所以传感器无法依靠电池供电。电池漏液以及电池充放电循环次数有限等问题会降低传感器的使用期限。但是,本文提出的传感器是依靠电感耦合供电并进行数据通信。电感耦合是一种适用于RFID系统的成熟技术。本文提出的腐蚀传感器包含一个RFID调制解调器,以便与商用RFID读写器进行通信。
该传感器同时包含一个低功率单片机(MCU),用于控制恒电位仪并读取线性极化曲线。极化曲线存储在电可擦可编程只读存储器(EEPROM)上。EEPROM以及RFID调制解调器均被集成在单片机上。RFID读写器能够通过RFID调制解调器访问EEPROM内容,并读取实测线性极化曲线。通过串行端口将RFID读写器收集的数据发送至用于分析、显示极化曲线的计算机。
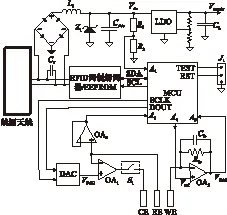
图2 提出腐蚀传感器的电路原理图
2 提出传感器的设计
2.1 电路设计
图2是腐蚀传感器的电路原理图。该传感器是由低功率混合信号MCU(德州仪器MSP430F2012)、带有RFID调制解调器的双重存取EEPROM(意法半导体M24LR64)、16 bit数模转换器(德州仪器DAC8411)、3个功率运算放大器OA1和OA2(德州仪器OPA2369)以及低失调零点漂移OA3(德州仪器OPA330)组成。
MCU包括8输入10 bit集成模数转换器(ADC)、片内基准电压发生器、温度传感器、I2C和SPI串口以及5种节电模式。MCU通过RFID调制解调器和线圈天线与外部RFID读写器进行通信。由二极管电桥对线圈天线处的交流(AC)电压进行校正,并由低压差线性稳压器(LDO)对其进行调节,以便使传感器的电源电压维持在3.0 V。电容器CT是可变电容器,可将天线调整至13.56 MHz RFID载波频率。稳压二极管Z1能够保护LDO免受电压过载。扼流电感器L1能够阻止过高的载波频率进入LDO,以便减少电源噪音。电阻器R1和R2组成了分压器,所以MCU能够监测LDO的输入电压Vdc,该电压能够调整输出功率。通过外部RFID读写器实现读取Vdc。
运算放大器OA1~OA3、数模转换器(DAC)以及开关S1组成了三电极恒电位仪,用于进行线性极化测量。为此,首先必须对腐蚀电池的开路电势(OCP)进行测量。为了测量OCP,首先MCU必须开启开关S1,并生成(通过引脚A4的)基准电压Vref=1.5 V。运算放大器OA2的虚拟接地效应会将WE电势设置为Vref。通过ADC引脚A5可以读取RE电势。最后,将RE电势减去Vref就能够计算出开路电压。
为了测量线性极化,MCU必须闭合开关S1,输出基准电压Vref,并预先确定DAC输出下列电压:
(1)
斜率变量控制着线性极化测量的方向。可以通过RFID接口改变斜率变量的增长率以及点数。对于斜率变量中的每个点而言,利用内部ADC和MCU能够读取到运算放大器OA2的输出电压VOA2。通过读取Icell流经电感Rfb时生成的电压,可测量出流经WE的电流Icell,关系式如式(2):
(2)
电容器Cfb(与Rfb并联)主要用于过滤出线性极化数值中的高频噪音。为了进一步降低数值中的噪音,极化曲线上的每个点需读取64次,并记录其平均值。此方法同样也适用于测量OCP。
2.2 通信设计
能够进行RFID通信的元件是双接口EEPROM。该EEPROM集成了RFID调制解调器,能够在13.56 MHz运行,并支持ISO 15693和ISO 18000 RFID通信标准。同样也能够通过I2C端口对EEPROM进行访问。通过I2C端口,MCU能够读写EEPROM的内容。所以,外部RFID读写器以及MCU通过读写能够与双接口EEPROM的特定位置交换数据。
为将指令发送至MCU,RFID读写器会在EEPROM位置0000h写入1 byte。MCU每秒都会读取位置0000h。如果编写了新的指令,MCU会继续执行该指令。如果指令执行结束,MCU会判断提示IDLEbit向读写器发送信号:指令已执行。如果未执行指令,MCU会进入低功率模式以减少功率损耗。
MCU能够执行的指令包括测量线性极化、读取OCP、读取温度以及读取电源电压Vdc。测量结果存储在预定义的内存位置,能够通过RFID读写器进行读取。极化曲线数据存贮在多个数据块(32 byte)中,每个数据块均具有一个CRC以及碰撞数据字段。如果CRC检查失败或者检测出碰撞,则会再一次读取数据块,直至CRC检查正确并且未检测出碰撞。此错误检测机制能够确保传感器的数据不受传输错误的影响。
3 功率损耗和电感耦合分析
本文对腐蚀传感器各个元件的电流损耗进行了测量。在空闲状态下(等待外部读写器发送指令),传感器的平均电流损耗为100.2 μA。当传感器进行线性极化测量时,平均电流损耗最大即225.2 μA。
表1是腐蚀传感器各个元件的电流损耗,用百分比表示。当基准电压产生电路开启并且输出已发送至MCU外部时,电流损耗最大。使用(MCU外部的)离散基准电压产生电路能够进一步降低传感器的电流损耗。
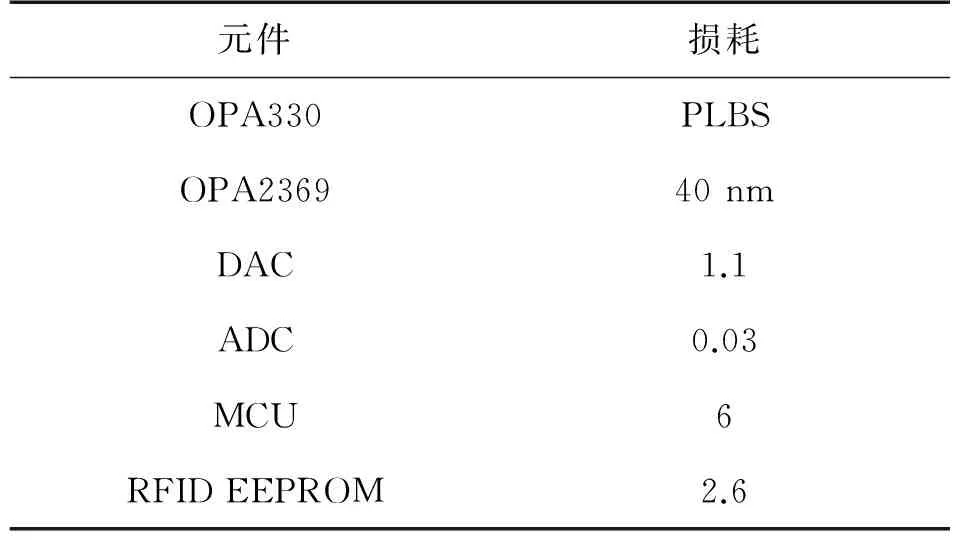
表1 提出传感器中元件的实测电流损耗(用百分比表示)
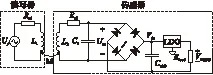
图3 提出传感器与RFID读写器之间电感耦合的等效电路
使用文献[6]提出的方法对电感耦合链路进行分析。图3是传感器与RFID读写器之间电感耦合的等效电路。
利用电感L1模拟读写器天线。Rs1会模拟与电源电压vp输出电阻串联的L1电阻。同样地,利用带有串联电阻Rs2的电感器L2模拟传感器线圈天线。电容器C2会模拟与传感器天线并联的电容,其中包括调谐电容和RFID调制解调器的输入电容。

(3)
反过来,利用等效AC负载Rac能够模拟整流器以及DC负载Rdc,如图4所示。这表明,通过能够获得等效AC负载Rac[10-11]:
(4)
式中:Vdiode表示电压整流桥中二极管两端的电压降落。将式(3)代入式(4)后得出:
(5)

图4 AC负载的等效电路
为了简化图4中的电路分析,使用非耦合电感器L1(1-k2)和L2(1-k)替代双向耦合电感,如图5所示。
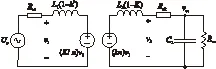
图5 带有非耦合电感的等效电路
若给出vp值,通过迭代的方式可以解出式(7)和式(8)。不超过50次迭代之后,v1和v2就会收敛。根据图5中的等效电路,v1和v2的表达式可表示为:
(6)
(7)
式中:k表示天线之间的耦合系数,可表示为:
(8)
(9)
4 传感器具体实现与测试设置
本文设计并实现了提出传感器,图6是带有所有传感器元件的印刷电路板(PCB)。PCB尺寸(包括安装元件在内)为4.5cm×2.5cm×1.6cm。PCB包括一个三针接头,可将3个电极连接在电路板上。
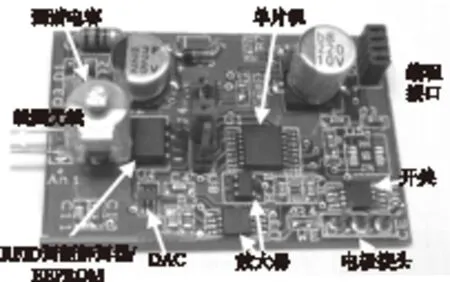
图6 提出的无线腐蚀监测传感器电路板

图7 利用框架结构组装的腐蚀传感器
WE是用一段钢筋制成。对该钢筋进行加工之后,制作出尺寸为1.3 cm×0.5 cm×1.0 cm的工作电极。利用导电环氧树脂将电线与工作电极相连。CE是采用尺寸为1.5 cm×0.5 cm×1.5 cm的碳电极制成。RE为银/氯化银电极,其电极元件为99.9%纯银电线。
制作了PCB、电极以及天线的框架结构。图7是整体框架结构,附有腐蚀传感器的各种元件。工作电极与对电极面对面,以便创建一个直流路径。工作电极的外露面积为0.55 cm2。通过在结构四周缠绕上28 AWG电磁线,完成传感器天线制作。经过测量,传感器天线的电感为3.9 μH。框架结构外是一个盖子,盖子内部镀有铁氧体片,可将传感器电子元件与经过RFID读写器辐射的区域隔开,从而使感应噪音降到最小。整体体积为11.8 cm×4 cm×5.6 cm。
5 测量结果与分析
5.1 等效电路有效性验证结果
为了验证等效电路有效性,利用厚度为3 cm的混凝土砖,将读写器与传感器线圈天线隔开后,进行了多次测量。对测量设置的耦合系数k进行了预估,即0.762。图8是Vdc的实测值以及(L1=400 nH,L2=3.9 μH,C2=35 pF,Rload=20k,Rs1=50.8 Ω,Rs2=0.5Ω,Vload=3.0 V以及ω=2π×13.56×106条件下)根据等效电路预测的数值。由图8可看出,测量结果与等效电路估计值结果十分吻合,这表明:如果想要获得3.1 V及以上Vdc电压(LDO跌落电压约为0.1 V),vp的幅度应至少为4.4 Vpp。对于不同的混凝土厚度,可再次对耦合系数进行测量,通过等效电路计算出读写器的最小输出电压。
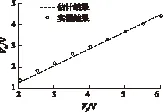
图8 读写器输出电压vp变化时的实测和估计Vdc
5.2 耦合系数测量
为了测量耦合系数k,将读写器天线和传感器天线放置在厚度为3cm的混凝土砖两侧进行测试。读写器天线与函数发生器相连,而传感器天线与示波器相连。
函数发生器用于生成正弦曲线,频率为13.56MHz,幅度为U1=1V。利用示波器测量出传感器天线的感应电压幅度U2。然后,通过下列等式计算出耦合系数[12]:
(10)
式中:γ表示校正因数,可表示为:
(11)
如果Cp=10pF并且实测值U2=2.87V,根据式(10)和式(11)可得出耦合系数k=0.762。该数值表明天线之间的耦合较强。
5.3 混凝土腐蚀电池作用测量
计算机(PC)通过串口与RFID读写器相连。如果检测出CRC或者碰撞错误,GUI会自动重试上一个读/写运行,以保证从传感器收集到的数据不受传输错误的影响。
通常,钢筋混凝土结构会在使用几年之后出现腐蚀。本文进行了加速测试,以便评估几天后混凝土介质中腐蚀传感器的性能。利用基于混凝土的腐蚀电池,进行电化学腐蚀测试。利用预先搅拌的混凝土配置混凝土样品。该样品放置在3%(容重)的NaCl溶液内。
由于混凝土样品的体积较小,氯离子能够在几天内快速扩散至诱发腐蚀的工作电极内。连续24d(天)利用研发的传感器以及精密台式恒电位仪(VersaSTAT3)对基于混凝土的腐蚀电池进行线性极化测量。为此,需移除传感器盖,电极应与PCB断开连接,与台式恒电位仪相连。
利用获得的线性极化曲线计算出极化电阻。图9是通过极化曲线计算出的极化电阻,极化曲线是利用台式恒电位仪以及研发的RFID传感器所获。由图9可以看出,从传感器获得的数据与台式恒电位仪十分吻合,这表明:第8d(天)的腐蚀十分活跃,其特点是极化电阻大幅减少。

图9 根据线性极化曲线计算出的极化电阻
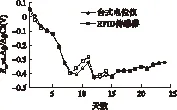
图10 利用台式恒电位仪以及研发的RFID 传感器测量出的OCP
图10是传感器以及台式恒电位仪读取的OCP。由图10可看出,两组数值十分吻合。在第7 d(天),OCP低于-0.234 V,这表明:腐蚀十分活跃(利用银/氯化银电极测得的-0.234 V)。因此,根据标准ASTM C876(混凝土半电池电压测试方法标准)可知,第7天之后出现腐蚀的可能性高于90%。但是,第15天之后,OCP开始稳步增加。结合极化电阻测量和OCP读数结果,可以更加精确地展示腐蚀过程。
5.4 精确度测量
提出的传感器也能够测量温度。利用从传感器获得的温度信息能够作为OCP以及线性极化读数的补充,并且有助于彻底了解导致混凝土结构出现腐蚀的条件。
通过测试对RFID腐蚀传感器的测量不确定度进行了评估。利用RFID传感器以及混凝土腐蚀电池对COP、温度反复进行了测量。根据测量结果计算出了平均不确定度以及标准不确定度,其中,标准不确定度等于测量结果的标准偏差。
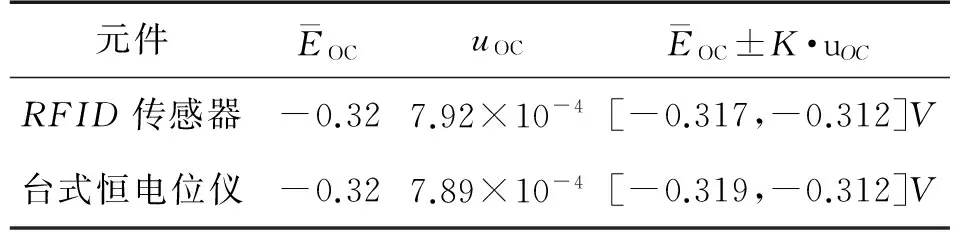
表2 OCP测量结果的平均不确定度以及标准不确定度
提出传感器内的单片机MSP430F201具有一个与内部ADC相连的偏上温度传感器。在传感器固件上编写了温度读取指令。如果读写器接收到了该指令,MCU会读取片上温度传感器的输出,并将结果存储在EEPROM上预定义的位置。嵌入式温度传感器的线性响应范围为-50 ℃~100 ℃[6]。因此,温度传感器输出电压Vtemp与温度T之间的关系式可表示为:
T=G·Vtemp++T
(12)
式中:G和Toff分别表示传感器的增益和偏置。为了校准温度传感器并求出G和Toff,利用RFID传感器以及OMEGAHH804U高精度温度计测量3个不同温度点的温度。分别在室温条件下、标称温度为4 ℃的冷室和标称温度为38 ℃的热室内收集测量结果。在每个温度点上,以每秒一个样品的速度收集100个测量结果。根据(传感器的)Vtemp平均值以及(高精度温度计的)T,利用最小二乘多项式拟合求出G=281.78 ℃/V以及Toff=-281.8 ℃。

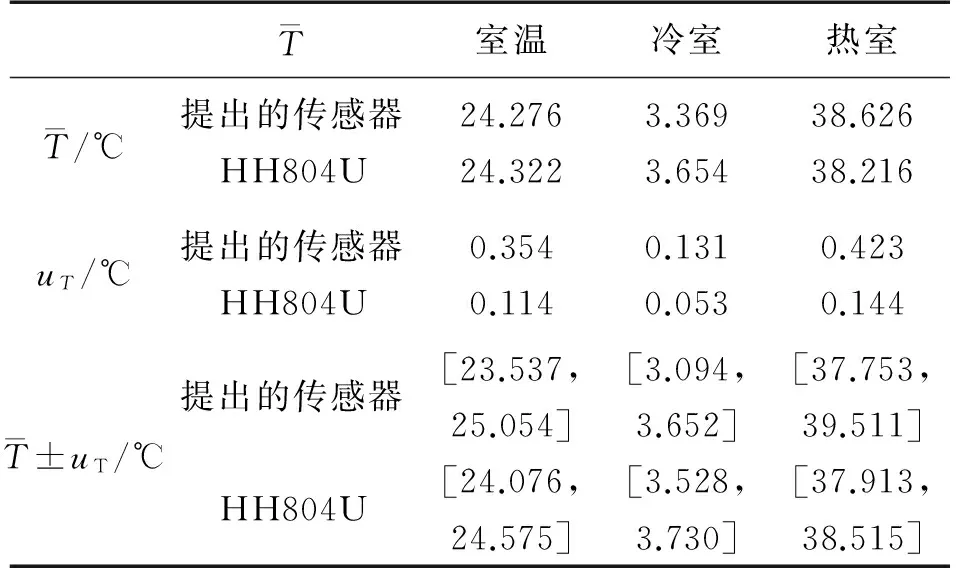
表3 温度测量结果的平均不确定度和标准不确定度
6 结论
本文提出了一种基于射频识别(RFID)的多功能无线腐蚀监测无源传感器。该传感器能够进行线性极化、开路电势以及温度测量。由外部RFID读写器供电。电子线路和3个电极均封装在一个尺寸为11.8 cm×4 cm×5.6 cm的机箱内。根据从传感器获得的线性极化电阻测量结果表明,该传感器性能与台式恒电位仪(成本较高且体积较大)十分相似,但是体积更小,可以通过倒填充孔安装在现有的混凝土结构中。另外也对提出传感器的测量不确定度进行了分析。通过实验能够发现,基于RFID的传感器测量精度能够与精密的台式仪器相媲美。
[1] 张强. Zn-5% Al镀层钢筋在混凝土中电化学腐蚀行为的研究[D]. 华南理工大学,2015.
[2] 梁成浩. 用电化学方法研究混凝土中钢筋腐蚀行为[J]. 材料科学与工艺,1993(4):33-38.
[3] 吴文操. 钢筋混凝土结构腐蚀监测无线传感器研究[D]. 南京:南京航空航天大学,2007.
[4] Perveen K,Bridges G E,Bhadra S,et al. Corrosion Potential Sensor for Remote Monitoring of Civil Structure Based on Printed Circuit Board Sensor[J]. IEEE Transactions on Instrumentation and Measurement,2014,63(10):2422-2431.
[5] Bhadra S,Thomson D J,Bridges G E. A Wireless Embedded Passive Sensor for Monitoring the Corrosion Potential of Reinforcing Steel[J]. Smart Materials and Structures,2013,22(7):182-187.
[6] Alamin M,Tian G Y,Andrews A,et al. Corrosion Detection Using Low-Frequency RFID Technology[J]. Insight-Non-Destructive Testing and Condition Monitoring,2012,54(2):72-75.
[7] 王袁,俞阿龙,李倩倩,等. 基于WSNs的混凝土中钢筋腐蚀度无线监测系统设计[J]. 传感器与微系统,2015,34(9):90-93.
[8] 舒泽芳,彭晓珊,陈敏. 多网融合的混凝土泵车状态远程监控系统设计[J]. 电子器件,2016,39:(1)193-198.
[9] Leon-Salas W,Kanneganti S,Halmen C. Development of a Smart RFID-Based Corrosion Sensor[C]//Sensors,IEEE. IEEE,2011:534-537.
[10] 王袁. 基于WSN混凝土内钢筋腐蚀度的远程监测系统设计[D]. 宁夏:宁夏大学,2015.23-31.
[11] 孙红兵,俞阿龙. 基于无线传感网络的大体积混凝土裂缝监控技术[J]. 传感技术学报,2013,26(3):415-420.
[12] 杨桂新,吴瑾,吴文操. 混凝土结构中钢筋腐蚀监测无线传感器[J]. 仪器仪表学报,2009,30(6):1152-1157.
Design and Implementation of a Multi-Function Corrosion Monitoring Wireless Sensor*
LIPingan*,SUNXiaojin,LUOJian
(School of Electronic Engineering,Hunan College of Information,Changsha 410200,China)
Based on the radio frequency identification(RFID),a multi-function wireless corrosion monitoring sensor is proposed,which is suitable for the corrosion monitoring of concrete. The sensor consists of RFID modem,low power microcontroller and low power three electrode potentiostat,it is mainly composed of an external RFID reading and writing device to supply power,and can be used to measure multiple parameters,including linear polarization,open circuit voltage,temperature and supply voltage. The sensor is packaged in a case with a size of 10.5 cm×4.5 cm×6.2 cm. The test results show that the performance and precision of the sensor can be comparable to that of the desktop constant potential meter(high cost and large volume). When the linear polarization measurement is carried out,the measured power loss of the sensor is 668 μW.
RFID;corrosion;concrete;monitoring
项目来源:湖南省教育厅科学研究项目(15C0983,15C0978)
2016-05-16 修改日期:2016-07-07
TP212.9
A
1005-9490(2017)03-0766-07
C:7230;7320T
10.3969/j.issn.1005-9490.2017.03.049