靶载光电脱靶量测量系统设计
2017-06-01李桂芝郑重商国勇
李桂芝,郑重,商国勇
(1.92941部队91分队,葫芦岛 125000;2.91202部队,葫芦岛 125000)
靶载光电脱靶量测量系统设计
李桂芝1,郑重1,商国勇2
(1.92941部队91分队,葫芦岛 125000;2.91202部队,葫芦岛 125000)
针对靶场试验需求,在靶船上设计了脱靶量测量系统。基于双站交会测量方法,采用4台高速摄像系统,将其分别布置在靶船的艏艉,实现方位360°周视成像;不同作用距离下对成像大小进行了计算,得出在50m作用距离下,最小交汇角达10°时,交会测量误差不大于3m;计算了靶船摇摆带来的系统误差。该系统实现了对试验中目标着靶末段落点偏差测量。
靶船;光电测量系统;脱靶量;测量精度
目前脱靶量一般采用两台经纬仪交会测量的方法,虽然经纬仪脱靶量测量采用基于同帧画幅处理的原理,可抵消一部分系统误差,但是,实际试验中靶点都距经纬仪较远,并且受海面复杂气象条件的影响,造成目标图像成像质量较差,导致中靶点的图像判读误差都很大。再加上经纬仪基于测角原理设计,随着距离的增大,脱靶量测量误差必然增大。其次,传统经纬仪基于事后数据处理方式设计,实时性差,不能满足当前高效率、短周期的试验要求,因此,针对以上问题,提出了一种利用四个图像传感器完成近距离测量脱靶量系统的设计方案[1,2]。“靶载光电脱靶量测量系统”基于可视化定位技术、高速摄像技术、实时多模式存储技术以及远程无线传输技术,采用四传感器交会测量方式,对目标着靶过程的实况景象进行高速成像和记录;可根据获得的图像数据处理出目标与靶心的偏差量。
1 系统设计方案
系统主要由高速可见光相机、等角投影光学镜头、视频存储及输出分系统、时统分系统、近程综合管理分系统、远程控制分系统、数据处理分系统、电源分系统等组成,系统组成如图1所示。靶船为长方形结构,在其前后有两座桅杆,用于安装和固定测量系统的两台摄像机,两台摄像机相互交会实现对着靶区域景象全覆盖。
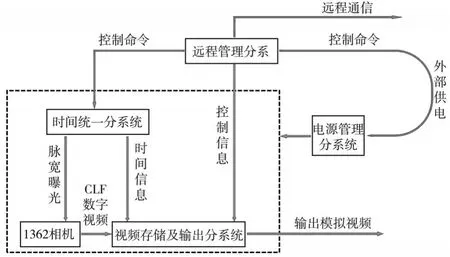
图1 系统组成示意图
2 测量方法
2.1 两站交会处理测量目标坐标
垂直于船首船尾的纵向上各布置一台成像测量站,每台成像测量站的视场角为180°×180°,两个测量站光轴都指向对方,试验前将每台测量成像系统进行标校后进行测量。建立靶船坐标系:原点为靶船中心桅杆与甲板交点,以船尾指向船首为x轴,垂直向上为y轴,z轴与x轴,y轴成右手坐标系,以靶船坐标系为运算坐标系进行后续处理,D为成像测量系统距离甲板的高程,P1/T1、P2/T2分别为船艏、船艉成像测量系统的观测视线。布站与测量示意图如图2所示:

图2 布站与测量示意图
对事后图像进行判读,获得目标的像面脱靶量(x,y),然后按照下式进行目标角度合成计算:

式中,x,y为目标的像面脱靶量,f为光学系统焦距,经过标校安装后A0,E0都可确定。根据各站的站址坐标(x1,y1,z1),(x2,y2,z2),按照光测设备中常用的空间目标交会处理方法进行交会处理得到目标在所建立的靶船坐标系下的三维坐标(X、Y、Z),水平投影公式如下:
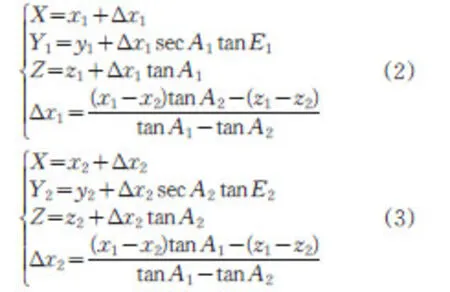
2.2 控制点设计
控制点用于对测量相机进行标定,其设计的合理性将影响实际应用中有关误差的标校,对后续数据处理带来误差[3,4]。将控制点设置在靶船的桅杆和两个烟囱上,通过控制点的高低与水平搭配实现对每一个相机的精确标定和其误差量的测量。
3 测量指标分析
3.1 成像大小分析
根据前面设计知所采用镜头为等角镜头,其视场为180°×180°,镜头的成像靶面覆盖为12.3mm× 12.3mm,高速相机的像元尺寸为14μm,那么单个像素的视场覆盖为:

即单个像素对应的视场为0.2°×0.2°。则其在距离L处的视场覆盖为:


表1 目标成像大小分析
根据上表知,在距离30m处3m×1m的成像大小达到了27.8×9.3个,在距离100m处,3m×1m的成像大小达到8.3×2.8个,在距离200m处,3m×1m的成像大小仍达到4.2×1.4个。
3.2 测量精度分析
理论上交会测量时:两线交会角为90°最好,交会精度最高,交会角越大(或越小),交会精度越差[5,6]。测量精度公式如(6)所示:
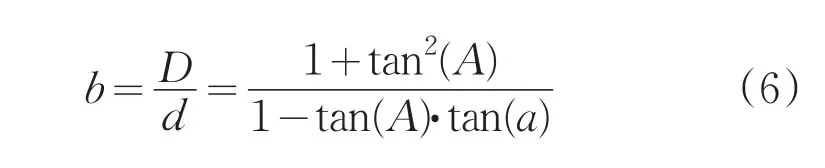
其中,a为系统的测角误差;d为交会角为90°时,系统误差产生的交会误差;D为交会角为90°±A时,系统误差产生的交会误差。在不同的测量距离和不同的交会角度下误差如表2~4所示(当判读精度为0.5个像素,即0.1°):

表2 测量距离30m情况下的测量精度
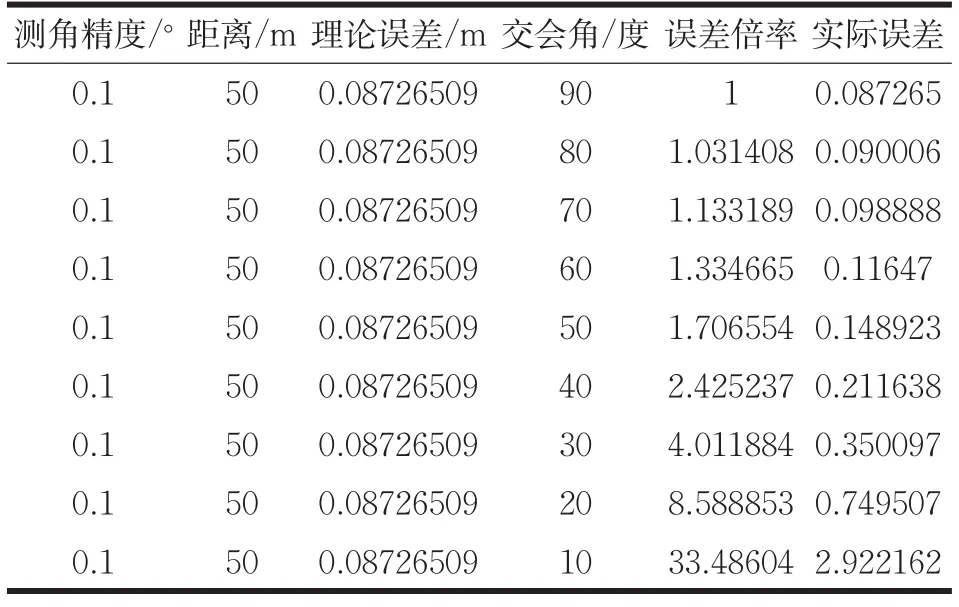
表3 测量距离50m情况下的测量精度
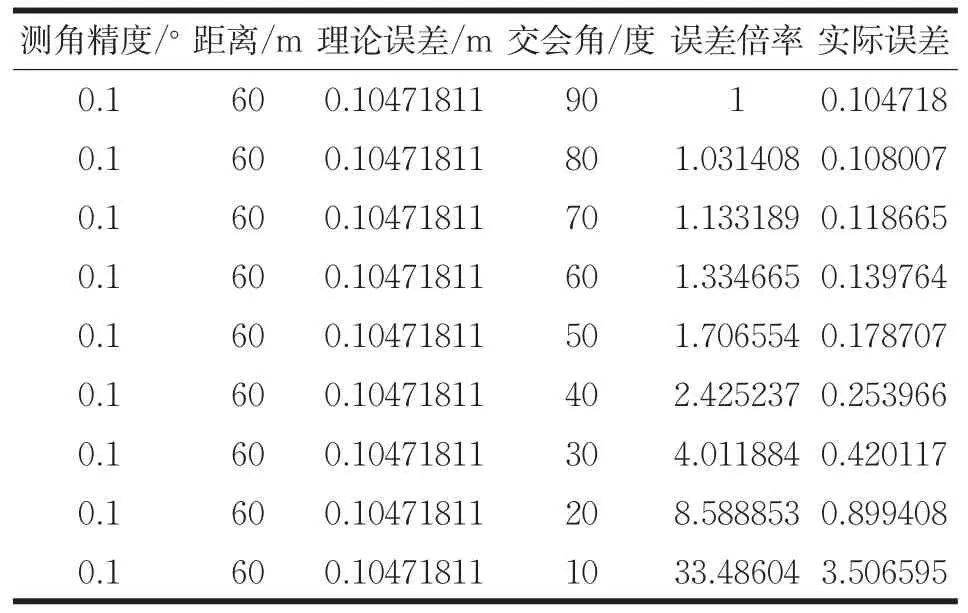
表4 测量距离60m情况下的测量精度
根据误差分析可知,只有在交会角度为10°时交会误差较大,但在50m测量范围内仍能满足3m的精度要求。
3.3 坐标系转换
靶船水平坐标系的定义为:以靶船甲板的中心为原点(与靶船坐标系的原点重合),以船尾指向船头为x轴正向,以在水平面内、垂直于x轴向左方向(迎着x轴看)为z轴,y轴垂直与水平面向上,x轴,y轴,z轴成直角右手坐标系。根据定义知,在实际中,将靶船坐标系通过两次旋转可以与靶船水平坐标系重合;将靶船坐标系绕z轴旋转a(以逆时针旋转为正),使靶船坐标系x轴与靶船水平面坐标系的x轴重合,a角为船的前后摇摆角度;将靶船坐标系绕x轴旋转b(以逆时针旋转为正),使靶船坐标系的z轴与靶船水平坐标系的z轴重合,b角为船的左右摇摆角度。假设靶船坐标系用(x′,y′,z′)表示,靶船水平坐标系用(x,y,z)表示,则有:

靶船摇摆带来的影响:相机的工作帧频为500fps,假设靶船的左右摇摆速度为5°/s,前后摇摆假设为0°,则两帧间靶船的摇摆角度为b=5×3600/ 1000×2=36″。
4 结论
设计的靶载光电脱靶量测量系统,采用四台帧频为500Hz的高速摄像机,实现对高速运动目标的精确测量,在作用距离不大于50m的情况下,测得目标落点偏差测量精度小于3m,最小交汇角可达10°,在极端情况下还可采用单站测量实现目标着靶的脱靶量测量。因此,该系统具有高速、高精度、低盲区和全向探测等优点,能够完成试验中靶实况和脱靶量的测量任务,满足试验鉴定对脱靶量测量提出的实时性强、视场大、精度高的新需求。
[1]张三喜.弹道特征参数摄像测量[M].北京:国防工业出版社,2014:12-70.
[2]何照才,胡保安.光学测量系统[M].北京:国防工业出版社,2002:40-66.
[3]张博,段锦,景文博.基于CCD的光学测角精度检测方法[J].长春理工大学学报:自然科学版,2010,33(4):55-57.
[4]王喜军,王军,杨会玲,等.基于多CCD拼接相机测角精度检测[J].长春理工大学学报:自然科学版,2005,28(4):36-38.
[5]闫海霞,刘岩俊,王东鹤.大视场红外光电经纬仪精度标定[J].红外与激光工程,2015,44(3):832-836.
[6]刘利生.外测数据事后处理[M].北京:国防工业出版社,2000:230-257.
Design of Photoelectric Miss Distance Measurement System Based on Target Ship
LI Guizhi1,ZHENG Zhong1,SHANG Guoyong2
(No.92941 Unit of PLA,Element 91,Huludao 125000;No.91202 Unit of PLA,Huludao 125000)
According to the test requirements of target range,a photoelectric miss distance measurement system was designed on the target ship.Based on the method of double station intersection,the azimuth 360°panoramic imaging was realized by using 4 high-speed video cameras arranged on the starboard of the target ship.The image size was calculated in different action distance,it was concluded that the minimum intersection angle was 10 degrees under the action distance of 50m and the intersection mea⁃surement error was not more than 3m.The error was calculated caused by the target ship swing.The measurement of the terminal target point deviation can be realized by the system in experiment.
target ship;photoelectric measure system;miss distance;measurement accuracy
TH741
A
1672-9870(2017)02-0057-03
2016-11-02
李桂芝(1967-),女,硕士,高级工程师,E-mail:331964015@qq.com