应用于膀胱功能重建的多通道骶神经前根刺激系统设计与实验研究
2017-06-01王淑红吕晓迎王志功
汪 雷 王淑红 吕晓迎,3#* 王志功
1(东南大学生物电子学国家重点实验室,南京 210096)2(东南大学射频与光电集成电路研究所,南京 210096)3(南通大学神经再生协同创新中心,江苏 南通 226001)
应用于膀胱功能重建的多通道骶神经前根刺激系统设计与实验研究
汪 雷1王淑红1吕晓迎1,3#*王志功2,3#*
1(东南大学生物电子学国家重点实验室,南京 210096)2(东南大学射频与光电集成电路研究所,南京 210096)3(南通大学神经再生协同创新中心,江苏 南通 226001)
设计一种用于膀胱功能重建的多通道骶神经前根刺激系统。首先根据骶神经前根刺激(SARS)原理,确定系统功能指标与设计方案。完成各个模块软硬件设计与系统集成后,进行空气、生理盐水以及猪肉组织3种介质中的测试以及动物实验。在介质实验中,将发射和接收模块放在模拟人体环境的介质之中,测量各种空间条件下接收模块所接收到信号强度。结果表明,该系统可以在3种条件下实现信号的无线跨皮传输。动物实验中,发射模块放在猪肉表面,接收模块包埋在猪肉之中,通过钩状电极将接收到的刺激信号施加到蟾蜍的坐骨神经上。对6只蟾蜍所做的实验表明,系统可以在体内模块包埋深度达4 cm且容许一定位置容限的情况下,刺激蟾蜍左、右腿的坐骨神经分别产生明显伸腿动作,证明系统的可行性。系统的设计与实验研究为研发具有自主知识产权的可用于临床的SARS装置打下了基础。
膀胱功能重建;骶神经前根刺激;介质实验;动物实验
引言
目前,中国的脊髓损伤患者人数超过百万,并以每年6万的速度增加[1]。骶髓上损伤患者中有85%会在伤后出现神经源性的膀胱贮尿和排尿双重障碍[2]。持续的膀胱痉挛引起膀胱内压升高,压迫尿液沿输尿管逆流造成肾功能衰竭,是导致SCI患者后期死亡的主要原因[3]。在传统的治疗手段还不能完全治愈大部分神经源性下尿路功能障碍患者[4]的情况下,SARS(sacral anterior root stimulation)即骶神经前根电刺激技术成为目前临床应用较广泛的膀胱功能重建方法[5]。
目前国外基于SARS原理的临床应用系统如Finetech-Brindley系统已经上市[6],但进口价格昂贵,而国内研究多停留在初步的实验探索阶段[7],离实际应用还有较大距离[8-9]。因此,面向国内临床应用需求,笔者研发了一种用于膀胱功能重建的跨皮无线骶神经刺激系统,并进行了系统验证实验。
1 方法
1.1 系统方案
骶神经刺激系统主要采用SARS方法,其难点在于逼尿肌和括约肌的协同性[10]。为攻克这一难点,本系统设计采取了刺激后排尿与预疲劳括约肌的双重策略。其中,刺激后排尿主要利用了括约肌和横纹肌对电刺激的不同反应[10]:在刺激期间,逼尿肌和括约肌同时收缩。但在刺激结束之后,逼尿肌为横纹肌,对刺激反应迟缓,缓慢舒张;括约肌为平滑肌,对刺激反应迅速,刺激结束后迅速舒张得以排尿。预疲劳括约肌策略则利用连接括约肌和逼尿肌的神经纤维直径不同的特性[6]:连接括约肌的外周神经更粗,也更容易因为电刺激而疲劳,所以在骶神经前根刺激之前可以先预疲劳括约肌神经,减少逼尿肌和括约肌的不协同性。

图1 骶神经前根刺激系统结构Fig.1 Block diagram of sacral anterior root stimulation system
为了简化电路结构,刺激波形定为单向脉冲序列,分为预疲劳期和主刺激期。预疲劳期为连续的刺激脉冲序列,该阶段功能是使尿道括约肌预疲劳。主刺激期在预疲劳期之后,刺激信号为门控信号控制的刺激脉冲序列。该阶段是利用刺激后排尿策略,实现排尿的功能。主刺激期中的工作期用于刺激,关断期用于排尿,二者都必须达到数秒之长,以完成排尿的功能。在主刺激期或预疲劳期内,每个通道都可以有不同的刺激脉冲脉宽和频率,以实现不同刺激强度。结合放在不同骶神经上的电极,该系统可以实现不同功能,如排尿、排便、协助性功能等。考虑到患者的个体差异,所以设定的参数范围较大,以保证满足不同的需要。
根据系统的功能需求,确定了图1所示的骶神经刺激系统的设计方案。系统包括体外控制盒、发射模块(包括图中的发射线圈阵列和多通道体外发射电路)、接收模块(包括图中的接收线圈阵列和多通道体内接收电路)、刺激电极等。设计思想是通过体外控制盒产生低频脉冲刺激信号,然后利用发射和接收模块,实现信号由体外向体内的跨皮无线传输,从而刺激骶神经以实现相应的功能。
1.2 系统各模块设计
1.2.1 控制盒的设计
控制盒以STM32f103zet6为核心,控制液晶触摸屏、刺激参数存储模块、数控升压电源等模块。控制盒的外尺寸为150 mm×80 mm×30 mm,基本可以满足手持式设备的要求。控制盒的软件在实时操作系统μC/OSⅡ下运行。用户界面使用了μC/GUI的用户界面库制作,包括触发刺激、刺激参数的存储、回放、更改和显示等功能。
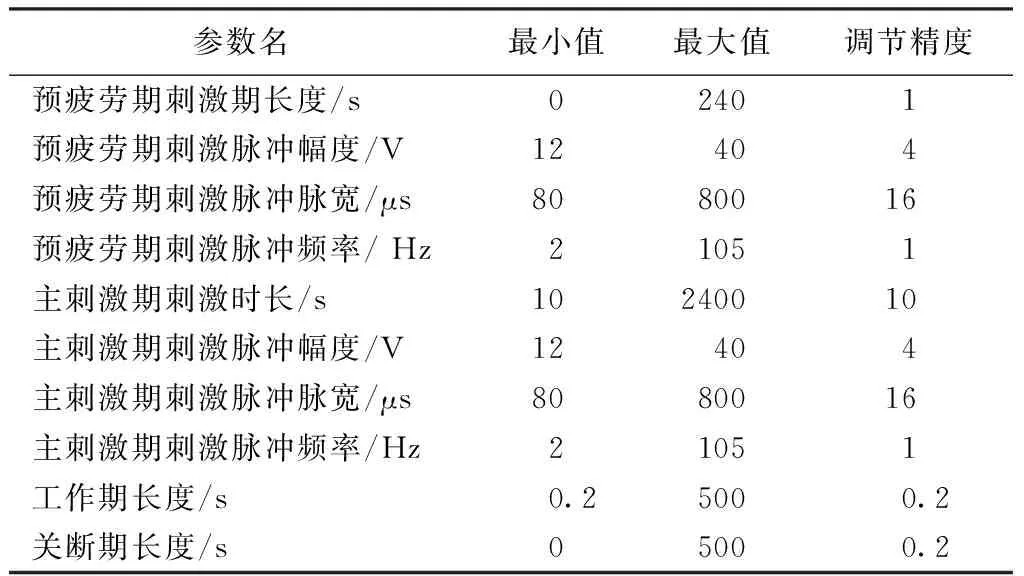
控制盒输出的刺激信号决定了接收模块所接收到的刺激信号的频率、脉宽等时序参数,输出信号幅值即为发射模块工作电压,与接收模块所接收的刺激信号幅值成正相关。使用数字示波器对控制盒数控升压电源各个档位的输出电压进行测试,结果表明刺激波形的脉宽、频率、发射模块工作电压等参数的相对误差小于2.5%,符合后级发射模块的要求。控制盒输出的刺激信号的参数如表1所示。
表1 控制盒输出的刺激信号的参数
Tab.1 Parameters of stimulating signal produced by control box
参数名最小值最大值调节精度预疲劳期刺激期长度/s02401预疲劳期刺激脉冲幅度/V12404预疲劳期刺激脉冲脉宽/μs8080016预疲劳期刺激脉冲频率/Hz21051主刺激期刺激时长/s10240010主刺激期刺激脉冲幅度/V12404主刺激期刺激脉冲脉宽/μs8080016主刺激期刺激脉冲频率/Hz21051工作期长度/s0.25000.2关断期长度/s05000.2
1.2.2 发射模块和接收模块
发射模块和接收模块基于电磁耦合原理,实现了刺激信号由体外向体内的传输。为实现多通道信号传输,采用了可并行传输且通道间干扰较小的微线圈阵列的传输方法。发射模块中的每一个发射单元唯一对应接收模块中的一个接收单元,形成各个传输通道。各个传输通道刺激信号的参数和载波频率可单独设置。
发射模块的作用是将需要控制盒输出的刺激信号通过二进制启闭键控(on-off keying, OOK)的方式进行调制。选择OOK调制方式的原因是体内接收模块是无源的,必须采用恒包络调制的方法。选择载波频率时要考虑到不同频率电磁场的穿透深度以及对人体组织的损伤程度等。根据文献[11],1~10 MHz范围内,无线传输通过人体的损耗是最小的。为了减小并行传输通道间信号的干扰,系统通道一、三的载波频率选为9 MHz,通道二的载波频率选为7 MHz。发射模块主要由高频振荡器、开关控制电路、并联谐振网络等组成。首先通过共基极放大电路与并联谐振网络,形成电容三点式振荡电路,获得各通道的载波信号。控制盒产生的刺激信号作为场效应管栅极的输入,开关控制振荡器工作,由此获得调制后的包络信号,再经发射线圈阵列发射出去。
体内接收模块通过接收线圈接收体外发射模块发射的信号,经无源解调后将获得的刺激信号传递给刺激电极。接收线圈采用了双层串联PCB线圈,且采用并联谐振的方式,以提高耦合效率。解调是调制的逆过程,解调(检波)电路由二极管和RC低通滤波器组成。
1.2.3 系统封装
在实际应用时,需将发射和接收模块分别整合为一个整体。体外发射模块利用3D打印技术制作了外壳。接收模块要植入于体内,所以需要使用具有良好的生物相容性材料进行封装。根据文献调研,笔者选用了美国道康宁Sylgard 184硅橡胶进行封装。封装方法为:应用电子天平按照预聚体和固化剂10∶1的比例秤取,搅匀后均匀涂抹在待封装的接收模块表面,然后放入恒温干燥箱,在70℃下固化4 h成膜后,完成封装。封装完成后将其浸没在生理盐水中4 h,接收模块内没有出现气泡。同其他模块进行联合测试,结果表明,封装后的接收模块可以正常工作。图2为系统各模块实物图,接收模块单通道半径为1 cm,整体直径小于6 cm。

图2 系统组成模块。(a)发射模块;(b)接收模块;(c)控制盒Fig.2 System component modules. (a) Transmitter module;(b) Receiver module;(c) Control box
1.3 系统验证实验
完成了系统各模块的软硬件设计之后,本研究验证了系统的功能和可靠性。验证实验所用仪器包括:Agilent公司的DSO6014A示波器、动物脑立体定向仪等。
1.3.1 不同介质条件下的空间位置关系实验
由于发射、接收模块间的人体组织会对电磁波产生吸收作用,因此进行了生理盐水(模拟血液)和猪肉组织(模拟人体)的验证实验。验证系统在对应介质条件下能够正常工作,并测试模拟情况下刺激信号的幅值。此外,实际应用时,人体活动可能会导致体内接收模块的位置变化,影响信号传输效率。因此必须分析空间位置关系对无线信号传输的影响。如图3为空间位置关系,其中dy、dx、α分别为系统轴向失配距离,径向失配距离和失配角度。位置失配实验中,在3个通道使用相同参数的传输信号的情况下,改变发射和接收模块的位置关系,测试等效负载端的输出电压。因为所使用的钩状电极与神经之间的接触阻抗为kΩ数量级,故所用的等效负载为5 kΩ。由于篇幅限制,本研究只给出猪肉介质实验参数,其他介质实验参数与之相同。
猪肉介质实验过程如下:购买长宽约10 cm、厚度约5 cm的新鲜的脂肪和肌肉分布均匀带皮猪肉(五花肉)一块;将与表皮深度为1、2、3、4 cm的猪肉组织切开,把接收模块包埋在猪肉中;将发射模块在动物脑立体定向仪的悬臂上固定且平行放置于猪肉之上,调整接收和发射模块间的空间位置,进行实验。
轴向失配实验中测量了发射模块工作电压为12、24和40 V时,轴向距离dy为0~4 cm时输出端的电压。径向失配实验固定轴向距离为2 cm,发射模块工作电压为40 V,只改变径向距离(0~3 cm)。发射模块中轴线左右两端的通道载波频率频率相同,所以左、右方向上径向变化对接收模块接收到的信号影响基本相同,因此测试了接收模块向左、上和下径向移动的情况。角度失配实验中,固定轴向距离为2 cm,电源电压为40 V时,改变发射、接收模块的放置角度α(0~20 °)。
1.3.2 动物实验
为检验系统是否可以通过跨皮刺激对应的神经使动物产生相关动作,以及测试使动物产生相关动作的信号大小及位置容限,本研究进行了动物实验。作为常用的医学动物实验对象,蟾蜍具有容易获取、手术操作简便、生物活性强、价格低廉等优点。因此,本研究使用蟾蜍作为实验对象。使用该系统进行无线跨皮刺激,蟾蜍产生明显的伸腿动作,说明可以实现神经的刺激,使肌肉产生相应动作,其原理与骶神经前根刺激使人体产生排尿、排便、协助性功能类似。
将接收模块包埋在切开的猪肉组织中,制作损脊蟾蜍,将蟾蜍去掉头部(目的是防止蟾蜍有自主意识)并捣毁脊髓(目的是破坏反射弧,防止蟾蜍的逃避反射);分离蟾蜍左右腿的坐骨神经分支,找到控制蟾蜍伸腿的刺激位点并固定铝导线制成的钩状电极。电极和神经接触部分是长约数毫米的剥去导线绝缘外层后的部分。动物实验现场如图4所示。
位置失配实验中,固定刺激信号脉宽为400 μs,频率为30 Hz,发射模块工作电压为40 V。轴向失配实验改变轴向距离(1~4 cm,1 cm为步进);径向失配实验和角度失配实验中固定轴向距离3 cm,分别改变径向距离(0~3 cm,5 mm为步进)和失配角度(0~30°,5°为步进)。
信号特性实验参数(固定的参数条件为刺激脉冲脉宽400 μs,频率30 Hz,刺激幅值40 V):幅值特性实验,改变发射模块工作电压(12~40 V,步进4 V);频率特性实验,改变刺激脉冲频率(10~100 Hz,步进10 Hz);脉宽特性实验,改变刺激脉冲脉宽(80~800 μs,步进80 μs)。
为了验证各个无线传输的通道之间的影响,进行了隔离度刺激实验。实验参数如下:发射模块工作电压为40V,刺激脉冲序列为连续刺激脉冲,发射和接收模块轴向距离为3 cm,左腿坐骨神经刺激频率为50 Hz,脉宽为400 μs,右腿刺激频率为2 Hz,脉宽为16 μs。然后交换左、右腿坐骨神经的刺激参数,再进行3次实验。
2 结果
2.1 介质实验结果
实验测试了空气、盐水以及猪肉3种介质中9种空间位置关系对跨皮无线骶神经刺激系统信号传输的影响。在生理盐水介质和猪肉介质下,系统均可以正常工作,能够实现信号的跨皮无线传输。实验结果显示,在3种介质中,当轴向距离、径向距离以及放置角度逐渐增加时,三通道输出信号的电压逐渐减小,而变化趋势基本一致。
表2、3列出了3种介质条件下输出信号大于1 V的位置容限指标。选取1 V作为比较的指标是因为1 V左右的神经刺激即可以产生多种神经活动。在实验参数之下,最大轴向失配为25 mm,最大径向失配为20 mm,最大角度失配为15°,系统允许存在一定的空间位置容差,说明在应用方面具有可行性和可靠性。
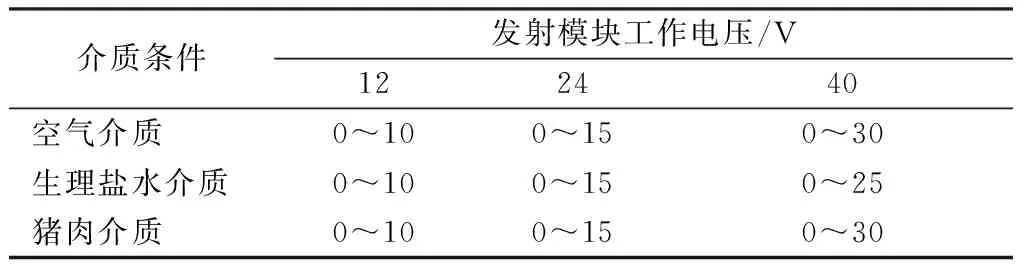
表2 3种介质条件对应的位置容限指标(轴向失配)
表3 3种介质条件对应的位置容限指标(径向和角度失配)
Tab.3 Position tolerance values (radial and angular misalignment) under three medium conditions

介质环境径向上/mm径向下/mm径向左/mm角度/°空气0~200~200~200~15生理盐水0~200~200~200~15猪肉0~200~200~200~15
2.2 动物实验结果
本研究共重复进行了6次动物实验(每次1只,一共6只蟾蜍),虽然蟾蜍存在个体差异性,但6次实验结果存在一致的结论。表4列出了6次实验中使蟾蜍产生明显伸腿动作的位置容限指标(发射模块工作电压设定为40 V)。结果表明,系统能够在体内模块包埋深度达4 cm的情况下,实现对蟾蜍坐骨神经的刺激,使蟾蜍产生明显的伸腿动作,并且容许一定的径向和角度失配。在6次动物实验中,实现刺激所容许的最大轴向失配为40 mm,最大径向失配为15 mm,最大的角度失配为15°,表明系统可以容许发射和接收模块间的空间偏差,具有广泛的可用性。

表4 位置容限指标Tab.4 Position tolerance values
表5列出了3种不同信号特性情况下蟾蜍能产生较为明显的伸腿运动的信号指标。实验表明,此刺激系统可以在接收模块包埋在一定深度(3 cm)下,通过各通道刺激对应的蟾蜍坐骨神经,实现蟾蜍的伸腿动作。在6次动物实验中,实现刺激的最小发射模块工作电压为32 V,最小的刺激信号频率为10 Hz,最小的刺激信号脉宽为240 μs,从而表明可以通过调整发射模块的工作电压以及刺激信号的频率和脉宽,实现不同的刺激强度。
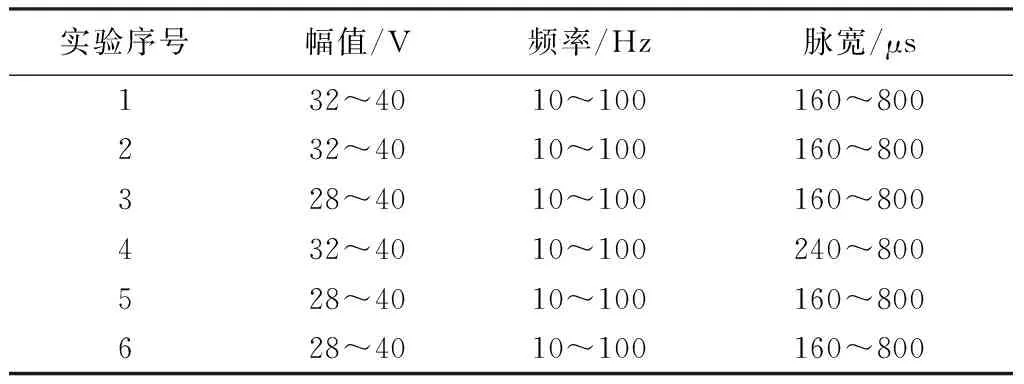
表5 信号特性指标Tab.5 Characteristic signal parameters
3 结论
本研究设计实现了一种用于膀胱功能重建的跨皮无线骶神经刺激系统,并进行了包括多种介质实验和活体动物实验的验证实验,证明了系统能够在体内植入深度达到4 cm的情况下,实现多通道跨皮无线的功能电刺激,并允许一定的空间位置偏离。为实现膀胱功能重建的下一步大动物实验和临床试验打下了基础。
[1] Qiu Jane. China Spinal Cord Injury Network: changes from within[J]. Lancet Neurology, 2009, 8(7):606-607.
[2] 张光铂.我国脊柱脊髓损伤基础研究、临床、康复的现状与展望[J].中国康复医学杂志, 2002, 17(4): 201-202.
[3] Frankel HL, Coll JR, Charlifue SW, et al. Long-term survival in spinal cord injury: a fifty year investigation [J]. Spinal Cord, 1998, 36(4) : 266-274.
[4] Van Rey FS, Heesakkers JP.Applications of neurostimulation for urinary storage and voiding dysfunction in neurological patients [J].UrolInt, 2008, 81(4) : 373-378.
[5] Brindley GS. The first 500 patients with sacral anterior root stimulator implants: general description[J]. Paralegia, 1994, 32(12):795-805.
[6] Brindley GS, Polkey CE, Rushton DN. Sacral anterior root stimulators for bladder control in paraplegia[J]. Paraplegia, 1982, 20(6):365-381.
[7] 雷波刁, 颖敏, 张梦杰. PDC-1膀胱功能电刺激器的原理及其动物试验[J]. 医疗卫生装备, 2003, 24(4):5-7.
[8] Sawan M, Ba A, Mounaim F, et al. Biomedical circuits and systems dedicated for sensing and neurostimulation: case study on urinary bladder dysfunctions[J]. Turkish Journal of Electrical Engineering & Computer Sciences, 2008, 16(3):171-187.
[9] Li YT, Chen J, Chen LT, et al. Wireless implantable biomicrosystem for bladder pressure monitoring and nerve stimulation[C]//2012 Biomedical Circuits and Systems Conference (BioCAS).Hsinchu:IEEE, 2012: 296 - 299.
[10] Rey FSV, Heesakkers JPFA. Applications of neurostimulation for urinary storage and voiding dysfunction in neurological patients[J]. UrolInt, 2008, 81(4):373-378.
[11] 宋涛, 霍小林, 吴石增. 生物电磁特性及其应用[M]. 北京: 北京工业大学出版社, 2008.
[12] 龚鑫. 植入式微电子神经桥芯片经皮无线供能系统研究[D]. 南京:东南大学, 2011.
Design and Experimental Research of Multi-Channel Sacral Anterior Root Stimulation System for Bladder Function Rebuilding
Wang Lei1Wang Shuhong1Lv Xiaoying1,3#*Wang Zhigong2,3#*
1(StateKeyLaboratoryofBioelectronics,SoutheastUniversity,Nanjing210096,China)2(InstituteofRF- &OE-ICs,SoutheastUniversity,Nanjing210096,China)3(Co-innovationCenterofNeuroregeneration,NantongUniversity,Nantong226001,Jiangsu,China)
bladder function rebuilding;sacral anterior root stimulation; medium experiment; animal experiment
10.3969/j.issn.0258-8021. 2017. 02.016
2016-01-25, 录用日期:2016-11-09
R318.6
D
0258-8021(2017) 02-0238-05
# 中国生物医学工程学会高级会员(Senior member, Chinese Society of Biomedical Engineering)
*通信作者(Corresponding author),E-mail: luxy@seu.edu.cn;zgwang@seu.edu.cn