基于喷水推进器的单手柄操纵系统推力分配策略
2017-06-01谢笑颖
谢笑颖,郝 芳,刘 赟
(上海船用柴油机研究所,上海 201108)
基于喷水推进器的单手柄操纵系统推力分配策略
谢笑颖,郝 芳,刘 赟
(上海船用柴油机研究所,上海 201108)
目前国内基于喷水推进器的单手柄操纵系统应用较少,通过人工控制2套推进装置的6个参数来实现船体的平移运动操纵复杂、难度大,由此,对基于喷水推进器的单手柄操纵系统推力分配策略进行研究。推力分配是单手柄操纵系统的关键技术之一,其任务是将手柄输出的合力指令分配给各推进器。根据喷水推进器的特性,提出级联广义逆结合组合偏置的控制策略。该推力分配策略基于能量最优、艏向优先的方法,能自适应地调整偏置量,并兼顾喷水推进器的操纵性。仿真结果表明,该策略能适应喷水推进器优异的操纵性。
喷水推进;水面艇;单手柄操纵系统;推力分配
0 引 言
对于安装有主机、舵机和艏艉侧推器等多种类型推进系统的船舶而言,其推进系统通常需分开操纵。但是,对于自动化程度较高的大型船舶或水面艇(如豪华游艇)而言,其均安装有主机、舵机和侧推器联合控制装置,这些推进系统通过主驾驶室内的一个单手柄即可操纵,故称之为“单手柄操纵系统”。
单手柄操纵系统操作简便、灵活,自动化程度高,适应能力强。其基本工作原理是采集操纵手柄3个自由度推动的大小和方向。手柄三自由度推动示意图见图1,其中:前后推动和左右推动代表船舶纵向及横向的推力指令;左右转动则代表船舶转向的转矩指令。

图1 手柄三自由度推力示意
控制器收到推力/转矩指令后,根据推进器的布置情况将合力/力矩指令分配给各个推进器,计算出各推进器推力的大小和方向,最终根据各推进器的特性将推力指令转换为油门位置、转向舵角等实际指令值,从而获得需要达到的力/力矩。该手柄推力指令分配给各推进器的过程也叫做推力分配[1]。推力分配示意见图2。
目前市场上的单手柄操纵系统产品主要有:Kongsberg公司的CJoy系统、GE公司的Joystick Control系统、Navis Engineering公司的JP4000系统、SeastarSolutions公司的OPTIMUS360s系统及Alamarin-Jet公司的IO-Intelligent Operation系统等。国内相关研究机构对此类产品的研究仍不成熟,且单手柄操纵系统主要应用于大型船舶,涉及的推进器多为全回转推进器、可调桨、舵机及槽道推进器等,并无基于喷水推进器的单手柄操纵系统。喷水推进器具有良好的可操纵性,转向灵活方便,无需主机倒车运行,传动机构简单,尤其适用于水面工作艇[2-3]。喷水推进器的结构简单,但需人工控制2套喷水推进装置的6个参数来实现船体的平移运动,操纵复杂、难度大。因此,提出基于喷水推进器的单手柄操纵系统推力分配策略研究具有重要的现实意义。喷水推进器的控制参数说明见图3。
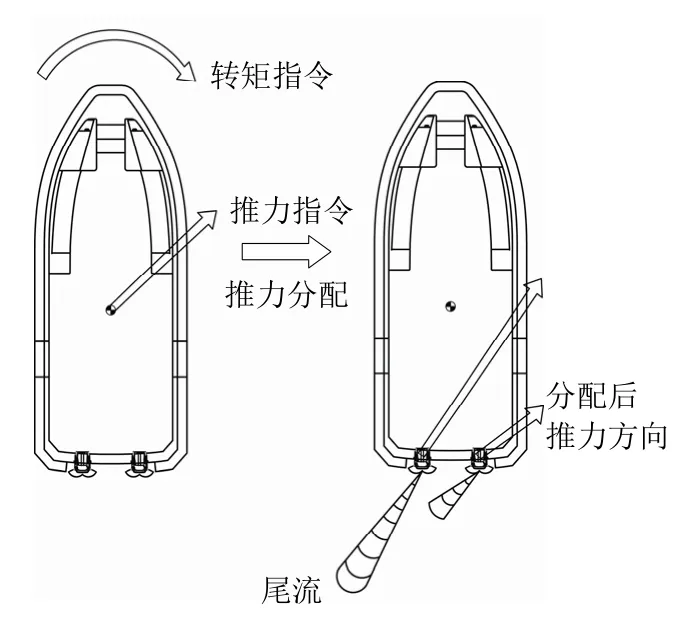
图2 推力分配示意图
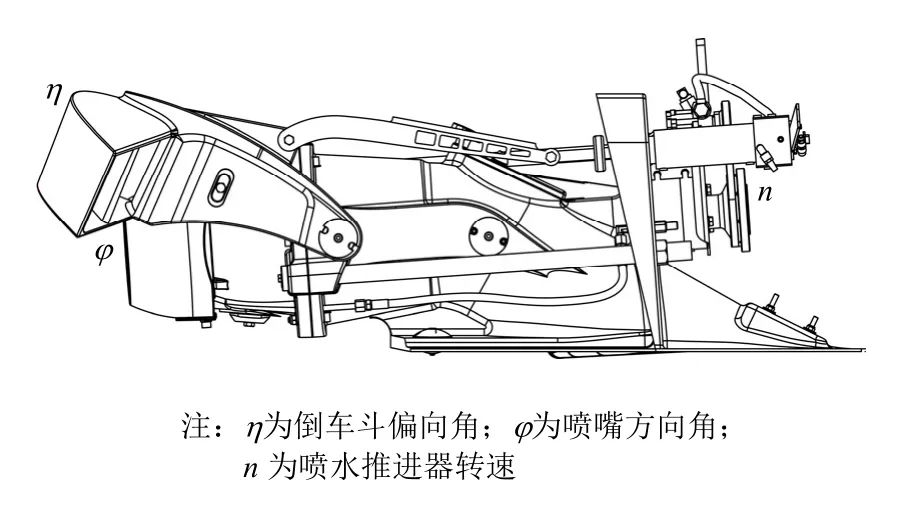
图3 喷水推进器控制参数说明
1 系统描述
推力分配的任务是实时分配操作手柄输出的三自由度(纵荡、横荡和艏摇)合力指令给具有2个喷水推进器的推进器系统,确定每个推进器输出推力的大小和方向,控制船舶在水平面内的运动。控制器通过状态反馈η,φ和n计算船舶所需的三自由度推力/转矩指令τ,推力分配单元负责将τ转化为各推进器的控制输入α和u。系统的工作原理框图见图 4,其中,α表示推力方向与船舶纵向之间的夹角,u表示各个推进器产生的推力的大小。
水面艇尾部安装有2个喷水推进器,图5为推力分配布置示意,其中为推进器在船体坐标系中的位置。

图4 单手柄操纵系统工作原理框图
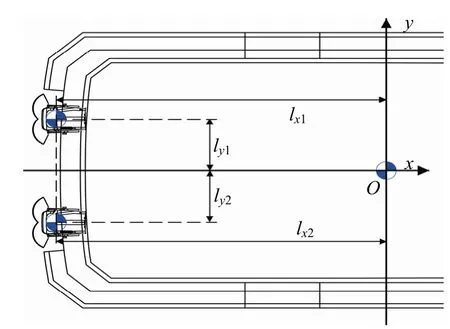
图5 推力分配布置示意

式(1)中:T为执行器推力,rT∈R;B为推力分配矩阵,表示 2个推进器推力在不同方向上的贡献值,
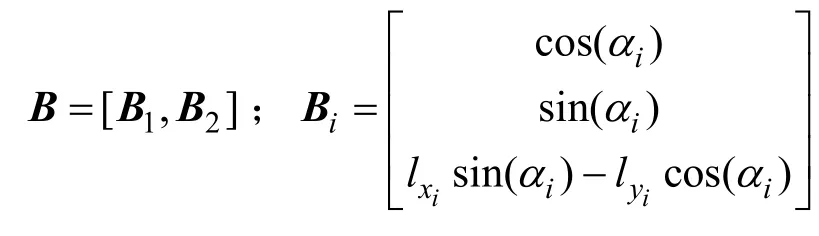

为单个推进器的配置矩阵,其中ixl和iyl为推进器安装位置的坐标;K为推力系数矩阵,为推力方向与船舶纵向之间的夹角,这里所涉及到的喷水推进器的正向推力和反向推力方位角的取值范围均为[-25°, 25°];u为各个推进器产生的推力的大小,x为纵轴方向,艏向为正;y为横轴方向,左舷为正。任意一个推进器输出的推力可按船体坐标轴分解为纵向分力和横向分力(见图6)。若推力不变,则当方位角α指向 0°时纵向分力达到正向最大值,当方位角α指向±25°时横向分力达到正向最大值。

图6 推进器输出推力分解

式(2)中:ixT 和iyT 分别为喷水推进器输出推力的纵向分力及横向分力。
推力分配主要归结为约束最优化问题:在满足合力需求和推进器约束的同时,最小化功率消耗、摩擦阻力、噪声或磨损及其他与控制使用相关的目标值。
2 喷水推进器推力分配策略
在该项目中,水面艇尾部安装有2个喷水推进器,每个推进器有3个变量(推进泵转速、喷口转向角和倒车斗角),这样共有6个变量,而根据输入信号只能建立3个方程,因此推力分配是多解的。考虑到推进器泵的转速、喷口转向角及倒车斗角对推力大小和方向的非线性限制,采用级联广义逆的方法给出约束范围内的最小范数解,这样既能准确地将力分解出去,又能起到节省能源的效果。
同时,为解决推进器在输出推力较小时工作效率较低、推力精度较差的问题,增强船舶的操纵性,提高系统的动态性能和精度,在推力分配中采用动态设置推进器偏置的方法。推进器偏置不会降低推进器的最大效能。随着合力指令的增加,偏置量会逐渐降低或消失。
2.1 推力分配策略
2.1.1 级联广义逆推力分配算法
2.1.1.1 广义逆推力分配算法
假设推进器的推力是无约束的,功率最优推力分配可描述为

由式(3)表示的等式约束最小化问题可运用拉格朗日乘数法来求解,对应的拉格朗日方程为

式(4)中:λ为拉格朗日乘子,3λ∈R。
由Karush-Kuhn-Tucker (KKT)条件,当推进器取得最优推力时,需满足


假设 1TBW B 非奇异,将式(5)代入到式(6)中可得



2.1.1.2 级联广义逆推力分配算法
BP =I有无穷多个解, B+只是P的众多求解方法之一,应用较为广泛的B广义逆的表示形式为

式(10)中:N为权值矩阵,其表达式为

通常称P为加权广义逆或加权伪逆,调节权值矩阵N的对角元素值可增强或减弱各推进器的推力在总推力中的比重,权值系数越高的推进器,分配的推力越大。
广义逆推力分配算法中推进器的推力是无约束的,计算的最优推力可能会超出某些推进器的推力范围,出现推力饱和现象。针对该问题,提出一种基于级联广义逆算法的推力分配方法,采用多步广义逆的方法改善单次求逆的性能缺陷,提高动力定位船的位置保持能力,解决约束推力分配中的推进器饱和问题。
级联广义逆的主要思想为:将任意推力指令超出推力范围的推进器的推力固定在推力饱和值处,并从总合力指令中将其扣除;重新对新合力指令进行推力分配,分配过程中不包括饱和的推进器;不断重复以上过程,直至获得最终的可行推力解和/或全部推进器都达到饱和[4]。
1) 由式(10)或式(11)计算B的广义逆P,并由该矩阵计算给定合力指令下的各推进器推力。若序号为i的推进器的推力超出其饱和值,则执行指令

式(12)中:(sat)iT 为推进器的饱和推力;cτ′为扣除饱和推进器推力后的新合力。
2) 改变推进器的布置矩阵,将饱和推进器从推力分配问题中移除之后,饱和推进器之外的新推力向量的计算式为

新推力向量 T′包含的控制量数目与原推力向量T相同,但饱和推力器对应的元素分配的推力为零。若T′中仍有推力超出其饱和值,则按相同的方法继续计算 P′′,直到不再有推力超限或所有推力都超限。
利用广义逆算法可得到显式解,因此级联广义逆算法计算速度快,具有很强的实时性。在出现推力饱和时,级联广义逆算法可通过再分配的方式继续输出推力,与单一的广义逆算法相比具有更强的推力输出能力,可有效降低合力误差,提高动力定位船的性能。
2.1.2 自动偏置法
推进器偏置是指为2个喷水推进器设定内部相互作用的推力,这些作用力相互抵消,对于整组推进器来说总的作用合力为零。组内相互抵消的推力称为偏置量[5]。推进器偏置原理示意见图7。
引入推进器偏置的好处在于既可避免推进器工作在推力较小的低效率区,又可减小方位角的变化幅度,有助

图7 推进器偏置原理示意
于解决推进器无法输出零推力的问题,改善船舶的操纵性及动态性能。
对于任意一对偏置推进器或偏置组,其偏置量Δ可由式(14)确定。
式(14)中:μ为偏置量系数。
推进器偏置不会降低推进器的最大效能,偏置量可自适应地调节其大小;随着推力指令的增加,偏置量会逐渐降低或消失。引入自适应偏置因子σ,其变化规律为

2.2 推进器模型
在指令调制过程中需用到喷水推进器模型,理论上建立的推进器模型越接近实际推进器,其控制效果越好,但模型越精确其反解的过程越复杂。因此,为兼顾准确性和实时性,这里采用等功率线形式的推进性能曲线指导喷水推进器的操纵,并在整个操纵过程中安排过渡过程,通过调整响应时间、动量影响因子等系数调整与实际推进器的匹配度,进而提高推力分配的准确性[6]。
Volvo Penta发动机的最大转速为3500r/min,发动机转速-功率特性曲线及喷水推进器航速-功率特性曲线见图8和图9。

图8 发动机转速-功率特性曲线
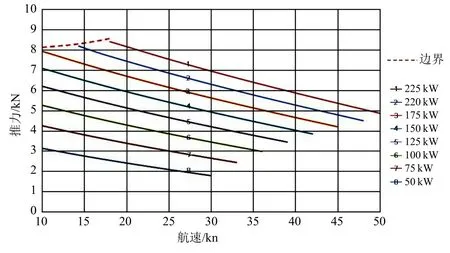
图9 喷水推进器航速-功率特性曲线
3 试验验证与分析
3.1 验证方法
利用MATLAB在推力限制范围内生成3组正弦波形控制力序列,分别代表纵向、横向及回转的控制力和力矩输入。
1) 将各组控制力序列输入给推力分配程序,通过循环迭代得到不同次数下各推进器推力的大小和方向,通过对推进器进行建模计算出各推进器的功率、喷口转向角及倒车斗的角度(以下简称倒斗角)变化曲线;
2) 将推进器的功率、喷口转向角及倒斗角的角度转化为各推进器推力的大小和方向,对分配后的力进行合成,并将得到的实际控制力与原来输入的控制信号进行对比,检验推力分配是否能将所有的控制力和力矩准确地分配给每个推进器。
3.2 验证结果
首先画出经过指令调制后的各推进器的功率、喷口转向角及倒斗角,然后将控制力序列与经过推力分配及指令调制后的实际控制指令画图进行对比。
3.2.1 纵向(正向)验证
推进器指令输出(纵向)、实际推力验证(纵向)及喷流方向示意见图10~图12。
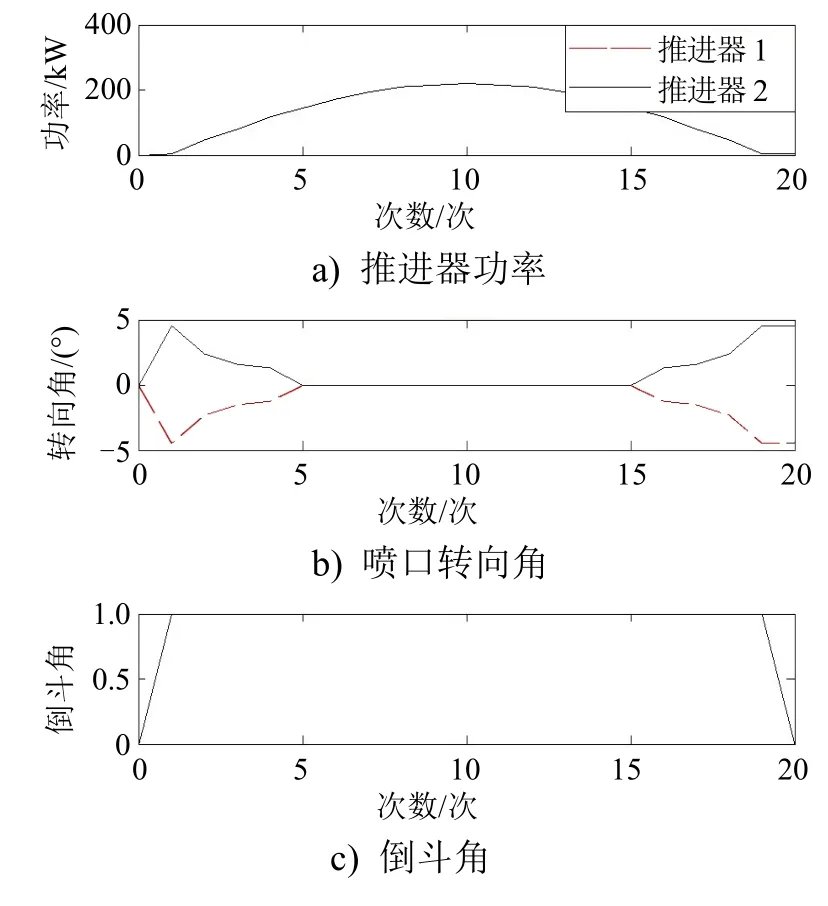
图10 推进器指令输出(纵向)
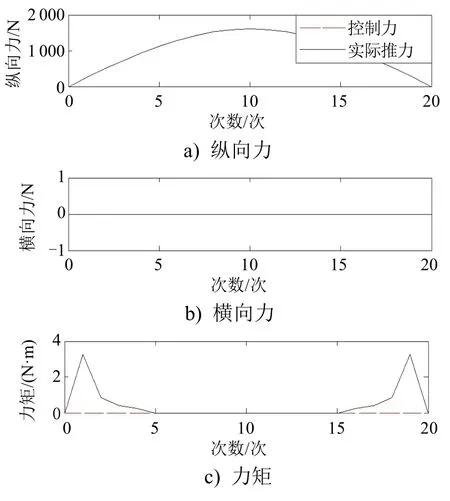
图11 实际推力验证(纵向)
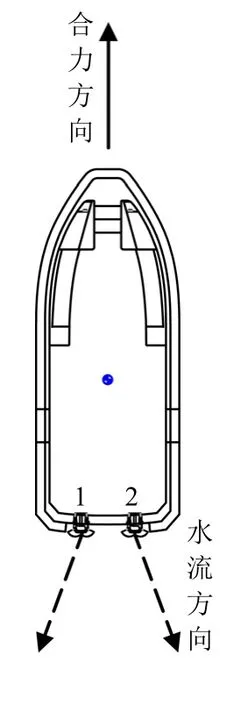
图12 喷流方向示意
3.2.2 横向验证
推进器指令输出(横向)、实际推力验证(横向)及喷流方向示意见图13~图15。

图13 推进器指令输出(横向)
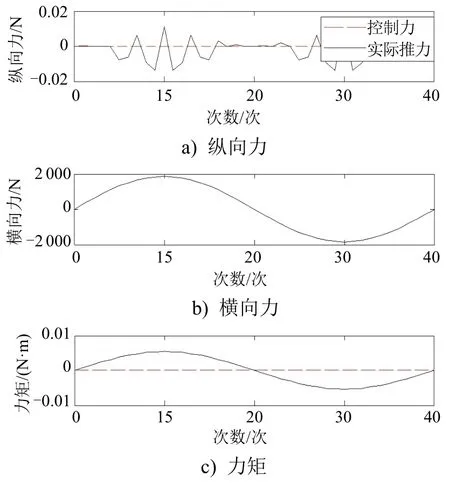
图14 实际推力验证(横向)

图15 喷流方向示意
3.2.3 转向验证
推进器指令输出(转向)、实际推力验证(转向)及喷流方向示意见图16~图18。
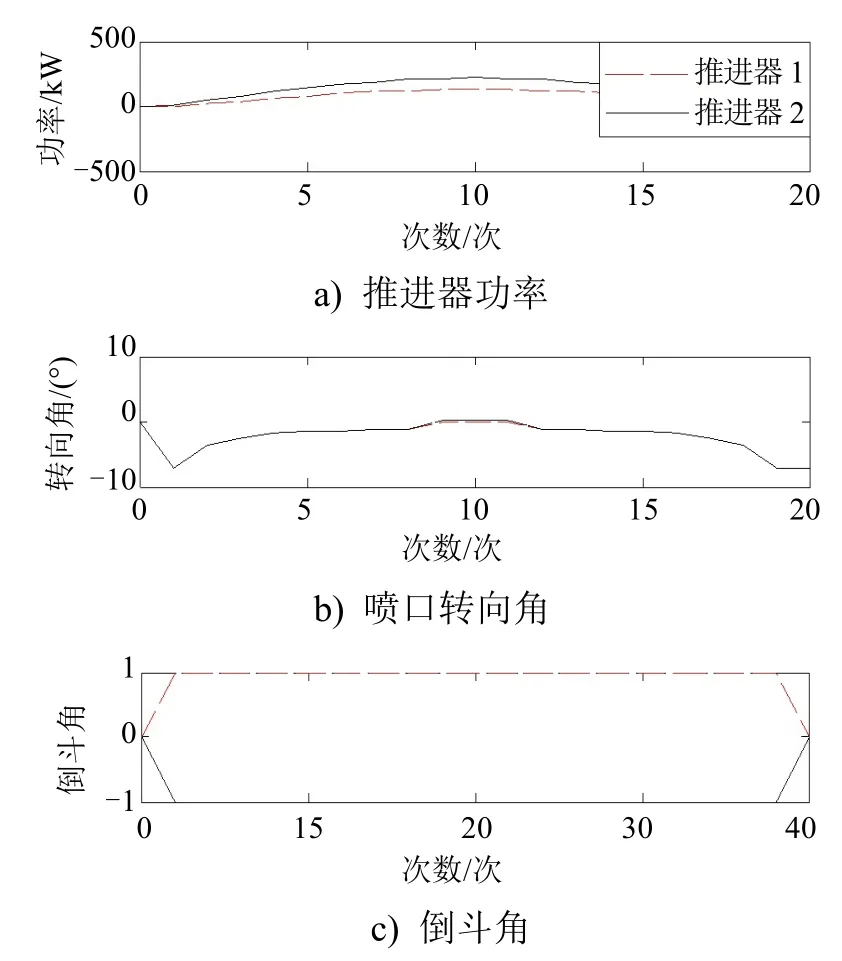
图16 推进器指令输出(转向)

图17 实际推力验证(转向)

图18 喷流方向示意
3.3 结果分析
1) 当控制信号只有纵向力时,喷口角度会随着纵向力的增大而从非零变为零,这是因为设置动态偏置使得2个推进器产生了相反的横向力,这能增强船的操纵性;但当纵向力增大时,为优先满足纵向推力,横向偏置会自动变小,从而导致喷口角度逐渐变为零。另外,动态偏置的设置使得2个推进器的喷口向外喷流不会对喷,这样可降低对喷造成的推力损失。
2) 当控制信号只有横向力时,为不产生力矩,2个推进器的喷流方向需通过船体重心。另外,由于其中一个推进器需反向喷流,而反向具有推力损失,为保证纵向分力抵消,反向喷流的推进器需更大的功率。
3) 当控制信号只有力矩时,2个推进器产生大小相等、方向相反的2个力,且这2个力相对于船体重心的力臂相同。
4 结 语
通过对推进器指令输出进行分析可知,每个推进器的功率、喷口转向角的变化都比较光滑,不会出现明显的抖动,效果良好,能达到控制要求。
通过对重新合成的实际推力验证图进行分析可知,纵向力分配的误差最大为0.02N,横向力分配的误差最大为0.001N,力矩分配的误差最大为3N·m,这对实际的控制系统而言几乎可以忽略不计,不会出现明显的抖动,分配效果良好,能达到控制要求。
[1] Kongsberg Maritime AS. Kongsberg K-Pos DP(OS) dynamic positioning system- operator manual[M]. Norway∶ Kongsberg Maritime AS, 2007∶ 9-20.
[2] 查森,林厚强,杨敏官. 船舶喷水推进装置特性曲线及其计算与绘制方法[J]. 江苏工学院学报,1988, 9(3)∶ 1-7.
[3] 林剑峰,马善伟. 水面高速无人艇自主控制系统研究分析[J]. 船舶与海洋工程,2014, 30 (4)∶ 57-60.
[4] FOSSEN T I, JOHANSEN T A. A survey of control allocation methods for ships and underwater vehicles[C]. 14th IEEE Mediterranean Conference on Control and Automation, 2006∶ 1-6.
[5] 施小成,魏玉石,宁继鹏,等. 基于能量最优的组合偏置推力分配算法研究[J]. 中国造船,2012, 53 (2)∶ 96-104.
[6] 丁江明,王永生. 喷水推进器推进性能曲线的两种表示方法[J]. 哈尔滨工程大学学报,2010, 31 (1)∶ 20-25.
Research on Waterjet Propeller Thrust Allocation Based on Joystick Operating System
XIE Xiao-ying,HAO Fang,LIU Yun
(Shanghai Marine Diesel Engine Research Institute, Shanghai 201108, China)
As joystick operating system is seldom used in water-jet propellers in China and it is very difficult to control ship translational motion manually according to the 6 parameters of the two propulsion units, this study investigates the thrust allocation strategies based on the joystick operating system. Thrust allocation is one of the key technologies of the joystick operating system to allocate the thrust forces on each propeller according to the total force from the joystick. Based on the characteristics of the water-jet propeller, the cascade generalized inverse method with group biasing is proposed as the control strategy. As energy priority and heading preference method are taken as the basis, the thrust allocation strategy can adaptively correct deviation and at the same time to ensure maneuverability. The simulation result shows that the strategy matches the excellent maneuverability of water-jet propellers.
water-jet propeller; surface vehicles; joystick operating system; thrust allocation
U664.82
A
2095-4069 (2017) 02-0046-07
10.14056/j.cnki.naoe.2017.02.008
2016-04-14
谢笑颖,女,工程师,1983年生。2010毕业于哈尔滨工程大学控制理论与控制工程专业,现主要从事船舶自动化研究工作。
