折叠平移型机器人手术器械车的应用效果
2017-05-31常颖李佳李玉刘彦江
常颖+李佳+李玉+刘彦江

[摘要]目的 评价基于CATIA三维设计软件设计的折叠平移型机器人手术器械车在机器人手术配合中的效果。方法 通过CATIA三维设计软件建模,建立折叠平移型机器人器械车。选择我院在2014年11月至2015年10月完成的100例机器人手术,按手术顺序分为对照组、实验组各50例。对照组使用普通器械车,实验组使用折叠平移型机器人手术器械车。比较两组的手术准备时间、医护人员满意度。结果 实验组的手术准备时间为(29.95±2.95)min,较对照组的(55.89±6.31)min明显缩短(P=0.000)。实验组与对照组的医师满意度分别为(93.36±3.38)分、(91.61±4.36)分,差异无统计学意义(P>0.05),而护士的满意度分别为(93.71±3.38)分、(90.90±4.50)分,差异有统计学意义(P<0.05)。结论 基于CATIA三维设计软件设计的折叠平移型机器人手术器械车的设计理论更充足,能够缩短手术时间、提高医护满意度,更适合医护人员操作,值得临床推广。
[关键词]机器人手术;手术器械车;折叠平移型
[中图分类号] R612 [文献标识码] A [文章编号] 1674-4721(2016)12(c)-0159-03
The application effect of translational folding robotic surgical instrument vehicle
CHANG Ying LI Jia LI Yu LIU Yan-jiang
Jilin Province Tumor Hospital,Changchun 130012,China
[Abstract]Objective To evaluate the effect of translational folding robotic surgical instrument vehicle based on the three-dimensional design software CATIA in the operation coordination of robot.Methods The translational folding surgical instrument vehicle was established through the CATIA 3D design software.From November 2014 to October 2015,100 patients were underwent robotic surgery in our hospital.By operative sequences,50 cases were given common instrument vehicle were selected as control group and the other 50 cases were given the translational folding surgical instrument vehicle as observation group.Operation preparation time and satisfaction degree of medical staff between two groups were compared.Results The operation preparation time of observation group was (29.95±2.95) minutes was significantly shorter than the control group [(55.89±6.31) minutes] (P=0.000).Physician satisfaction of the observation group and the control group was (93.36±3.38) points,(91.61±4.36) points respectively,and there was no statistical difference (P>0.05),while the nurse satisfaction of two groups was (93.71±3.38) points and(90.90±4.50)points respectively,and there was a statistical difference(P<0.05).Conclusion The design theory of translational folding surgical instrument vehicle based on the three-dimensional design software CATIA is more plentiful,and it can shorten the operation time and improve the satisfaction degree of medical staff and is suitable for the operation of medical staff.It is worthy of clinical promotion.
[Key words]Robotic surgery;Surgical instrument vehicle;Translational folding
機器人手术系统作为一种新兴技术,在腹腔镜手术的基础上延伸了外科医生的手眼功能,能更微观和精准地进行手术操作[1],目前已被广泛应用于胸心外科、普通外科、泌尿外科和妇产科等多个专科领域[2-6]。该技术的应用不但改变了手术治疗模式,也给手术室的护理工作带来了新视野、新角度、新挑战,对手术配合提出了更高的要求。近期我院应用“机器人手术系统”完成了胸科、妇科、泌尿科、腹科手术共100例。本研究基于CATIA三维设计软件设计的新型折叠平移型机器人器械车在机器人手术中的应用效果报道如下。
1资料与方法
1.1一般资料
选择我院在2014年11月~2015年10月完成的机器人手术100例。按手术顺序分为对照组与实验组,各50例,其中包括胸外科手术10例,腹科手术10例,泌尿科手术10例,妇科手术20例。同种类型的手术使用物品与摆台方法基本相同。
1.2方法
在机器人手术开始前,对照组采用普通器械车进行手术的器械摆台等准备,具体方法如下。①器械车准备:准备3个普通器械车L形分开放置并分别固定。②摆台:第1个器械车打开器械包敷料,第2、3个器械车加盖无菌中单。第1个器械车打开器械包敷料,第2个器械车放置腔镜器械,第3个器械车放置机器人专用器械。分别摆台完毕后将器械车合并成L形。
实验组由手术器械护士采用折叠平移型机器人器械车进行手术准备,具体方法如下。①器械车准备:首先打开固定折叠平移层卡锁,将折叠平移层抬起与主车上层平行,根据手术需要将折叠平移层滑动在主车上层的左侧或右侧,边缘对齐,将两个支撑腿打开,用力向下拉支撑腿直至车轮接触地面,卡扣自然弹出固定。取下主车上层凹槽盖子放于主车下层,将垃圾桶安装在折叠层对侧的主车支撑腿上,器械车准备完毕(图1)。②摆台:在主车上层打开器械包敷料,折叠层加盖无菌中单形成无菌区域,主车上层放置开腹器械、腔镜器械、各种敷料、盐水盆等。将机器人镜头主体固定至凹槽内,在镜头与折叠平移层之间的剩余距离进行机器人镜头对焦校准及白平衡。镜头线固定在器械车护栏的凹槽内。折叠层放置机器人器械及机器人保护罩。主车下层放置备用的器械及保护罩。
1.3效果评价
1.3.1手术准备时间 指器械护士上台开始到机器臂对接成功所用的时间。
1.3.2医护人员对手术实施过程的满意度 设计医护人员对手术实施过程的满意度调查表,对参与两组机器人手术的医师、护士分别进行满意度问卷调查。该量表共有5个维度,20个条目,1个条目5分。主要包括配合度、简易度、保护度、效率度、节约度等。满分100分,采用里克特赋分法,分为特别满意、满意、一般、不满意、非常不满意,分别赋予10、8、6、4、2分,分数越高,满意度越高。
1.4统计学方法
采用SPSS 16.0软件分析数据,计量资料用x±s表示,采用t检验,以P<0.05为差异有统计学意义。 2结果
2.1两组手术准备时间的比较
实验组的手术准备时间为(29.95±2.95)min,较对照组[(55.89±6.31)min]明显缩短,差异有统计学意义(t=26.346,P=0.000)。
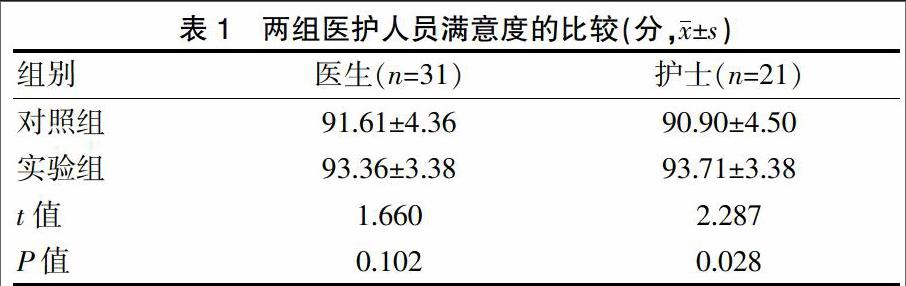
2.2两组医护人员满意度的比较
两组的医师满意度得分差异无统计学意义(t=1.66,P=0.102);两组护士的满意度得分差异有统计学意义(t=2.287,P=0.028)(表1)。
3讨论
机器人手术系统是微创外科的新时代产物[7],是一种将计算机、数字图像处理、微电机系统、传感器、生物制造与临床相结合的多学科交叉技术。目前已广泛应用于临床[8-10]。随着机器人手术的不断普及,对手术护理配合提出了新的要求。机器人手术器械多体积庞大,占据空间,且费用昂贵,而传统的双层矩形或扇形的手术器械车不具备延展功能,使用面积固定;平面设计,仅设有三面垂直护栏,保护功能有限,因此,无法满足机器人手术的需要[11]。作为手术室护理团队,面临着新的挑战。通过查阅大量文献[12-13],笔者发现,通过设计软件改建手术器械车,扩大使用面积,增加固定保护功能,才能够有效地满足临床需要。
CATIA是一种三维设计软件,是法国达索公司开发的产品[14]。多用于汽车等制造行业模拟设计其产品,该软件可模拟从设计、组装到维护的全部工业设计流程,形成三维效果。为此,本研究从手术实际需要出发,在目前平面设计的手术器械车的基础上,使用CATIA三维设计软件建模,设計出“折叠平移型机器人手术器械车”,不仅增大了器械车的使用面积,而且增加了针对机器人手术器械的专用设计,能够加强对机器人手术器械及镜头的保护,使新型器械车更具有实用性。其设计思路及优势如下。
3.1 设计思路(模拟图见图1)
①主车上层:三面设有防护栏;距左右防护栏10 cm处设有两个内嵌长方形凹槽,其长35 cm,宽10 cm,深度3 cm,用于放置固定机器人镜头。左右两侧设有双向把手,用于器械车的移动。②主车下层:两侧设有防护栏;内侧设有卡锁。③折叠平移层设计:三面设有护栏,横向护栏与纵向护栏衔接处设有10 cm缺口。设有两个可伸缩、固定的支撑腿。该层在未使用时可与主车上层垂直放置,主车即可当平车使用。④垃圾桶设计:设在上下两层之间,可360°旋转,使用时安装在折叠平移层对侧。⑤材料选择:主体采用承重较好且耐腐蚀的不锈钢304板材。6个车轮选用3寸静音轮,压制钢支架,表面覆盖防腐ABS材料,稳定性好。
3.2优势
3.2.1简化工作流程 折叠平移型机器人手术器械车可使多个器械车简化为一个器械车,由铺多个器械台变为铺一个器械台,器械敷料等物品分类定点放置,减少反复移动,并便于清点及查对。
3.2.2保护机器人用物 折叠平移型机器人手术器械车可将折叠平移层固定在主车下层,防止在推动器械车时该层发生侧移、碰撞,保护医护人员及手术室内其他物品。机器人器械及镜头费用昂贵,新型器械车独特的两个凹槽设计,用于固定镜头导线,并且近侧设有低高度护栏,防止物品掉落。
3.2.3节约时间、增加医护满意度 折叠平移型机器人手术器械车的折叠平移层具有平移性能、主层下层可放置机器人器械,上述功能均便于巡回护士取用所需器械,且垃圾桶的位置选择,便于器械护士丢弃垃圾,简化工作,节约时间。本研究发现,对照组的手术准备时间为(55.89±6.31)min,而实验组仅为(29.95±2.95)min,明显短于对照组,手术准备时间的缩短能够缩短整体手术时间及麻醉时间,从而减轻患者经济负担。同时医师护士的满意度明显增高,起到“一车多赢”的效果。
在临床手术中,将手術器械车进行改良对手术的配合发挥着至关重要的作用[15-17],本研究通过CATIA三维设计软件设计的折叠平移型机器人型器械车,在机器人手术的配合过程中,简化了护士的工作流程,节约时间,提高效率,且增强了机器人用物的安全性,增加医护满意度,值得推广应用,但我院为肿瘤专科医院,目前所设计改良的折叠平移型机器人型器械车的应用范围有限,随着机器人手术的不断发展及应用领域的不断推进,手术器械车也需不断被更新及改良。
[参考文献]
[1]周娅颖,魏静蓉,张琦霞,等.达芬奇机器人手术器械的清洗与灭菌[A]//中华护理学会消毒供应中心发展论坛暨两岸四地学术交流研讨会[C].2010:601.
[2]李鸿浩,刘雪梅,昝懿恒,等.达芬奇机器人手术系统在我国胸心外科应用的科学性和伦理学系统评价[J].中国胸心血管外科临床杂志,2014,21(3):380-388.
[3]丁仁泉,童向东,许世广,等.达芬奇机器人手术系统与电视胸腔镜在胸内纵隔疾病手术治疗中的对比研究[J].中国肺癌杂志,2014,17(7):557-562.
[4]李瑾,张成,蒋会勇,等.应用达芬奇机器人手术系统辅助直肠癌前切除术11例体会[J].中国普外基础与临床杂志,2012,19(12):1319-1322.
[5]丁晓萍,侯庆香,刘蕊,等.机器人手术系统辅助妇科手术60例报告[J].腹腔镜外科杂志,2012,17(10):784-786.
[6]刘忠宇,李秀丽,李卫平,等.达芬奇机器人手术系统在妇科肿瘤的临床应用[J].中华腔镜外科杂志:电子版,2014, 7(6):52-55.
[7]程勤,张玲琳,王家玲,等.470例达芬奇机器人手术护理配合关键点探讨[J].局解手术学杂志,2013,22(5):546-547.
[8]张小磊.应用达芬奇机器人手术系统治疗胃癌的临床研究[D].南京:南京大学,2012.
[9]张大坤,许世广,丁仁泉,等.达芬奇机器人手术与胸腔镜辅助小切口手术对肺手术患者创伤对比分析[J].创伤与急危重病医学,2014,2(5):296-300.
[10]陈翠屏.延展型手术器械车的设计及特点[J].中华现代护理杂志,2002,8(7):557.
[11]Sari V,Nieboer TE,Vierhout ME,et al.The operation room as a hostile environment for surgeons:physical complaints during and after laparoscopy[J].Minim Invasive Ther Allied T,2010,19(2):105-109.
[12]王媛.手术器械车的改进与临床应用[J].护士进修杂志,2006,21(8):728.
[13]郭振宇.腹腔微创手术机器人手术器械设计和操作仿真研究[D].哈尔滨:哈尔滨工业大学,2009.
[14]丁海峰,邵志民,王传铸,等.CATIA软件在轮胎三维设计中的应用[J].轮胎工业,2004,24(4):199-202.
[15]申贺利,栾建飞,马立欧.骨科上臂手术器械车的研制与应用[J].护士进修杂志,2010,25(6):571.
[16]袁伟,吴成如,吴健,等.骨科通用手术器械的设计研制与在脊柱外科手术中的应用[J].颈腰痛杂志,2013,34(2):110-113.
[17]Zullo MD,Mccarroll ML,Mendise TM,et al.Safety culture in the gynecology robotics operating room[J].J Minim In?鄄vasive Gynecol,2014,21(5):893-900.
