菜勺作业肩肘关节的生物力学分析
2017-05-30唐范李开伟易灿南
唐范 李开伟 易灿南


摘 要:菜勺是常用的烹煮工具之一,当使用菜勺进行烹饪时,需涉及到上肢的运动,特别是重复性的关节屈曲、旋转活动极易造成累积性工作伤害。研究通过设计模拟菜勺勺汤实验,利用VICON动作捕捉系统收集3种菜勺型号的右边上肢关节(腕关节、肘关节、肩关节)的三维运动坐标。通过对坐标数据分析结果发现,肘关节和肩关节的屈曲分别在33.55°至83.68°,12.95°至72.21°;而肘关节旋前角度47.15°至87.77°;菜勺型号(p<0.000 1)显著影响3个部位的力矩值,菜勺型号越大力矩值也相应增加。
关键词:菜勺;上肢关节;屈曲;旋前;力矩
中图分类号:X 912.9 文献标识码:A 文章编号:1672-7312(2017)02-0127-05
Abstract:Ladles are commonly used hand tools in cooking.Ladling involves movements of upper extremities,especially repetitive elbow flexion and rotation,which might lead to cumulative trauma disorders.This research simulates soup ladling using ladles of three sizes.VICON motion tracking system was adopted to capture the three dimensional coordinates of upper extremity joints (wrist,elbow,and shoulder).The analyses of the coordinates of the joints indicated that flexions of the elbow and shoulder were from 33.55°to 83.68° and from 12.95° to 72.21°,respectively.The angle of pronation of the elbow was from 47.15°to 87.77°.The size of the ladle significantly (p<0.000 1)affected the moment of the three joints.The moments in all the joints increased when the size of the ladle increased.
Key words:ladle;upper extremity joint;flexion;pronation;moment
0 引 言
上肢是人体完成作业活动的重要部位,而上肢作业频繁、姿势不当等会导致上肢的累积性工作伤害(cumulative trauma disorders,CTDs),造成作业能力和工作满意度下降的现象[1]。累积性工作伤害(cumulative trauma disorders,CTDs)是慢性肌肉骨骼伤害所引起的病变,导致CTDs的因素主要是工作姿势不良,过度施力及高度重复性[2]。上肢的累积性工作伤害的普遍性也被证实与很多行业有关[3-4],因此上肢累积性工作伤害在国内外调查中占肌肉骨骼伤害均有相当的比率。根据研究显示,使用手工具所造成的累积性工作伤害所占的比例最大[5-6];在美国因操作手工具所造成的伤害赔偿约占所有赔偿事件的10%,每年约造成100亿美金的成本损失。
菜勺是烹煮常用的工具,可以用来铲菜和勺汤,菜勺内凹的结构能避免食物洒出,因此深受家庭主妇和厨师的欢迎。以勺汤为例,使用者通常会用惯用手紧握菜勺手柄,反复进行勺汤、倒下动作,在此过程中需要上肢进行重复性作业来完成该动作;加之厨师的工作时间较长,极易造成上肢的累积性工作伤害[7-8]。使用者作业时一般为单手作业,双手使用菜勺的机会较低,且多为惯用右手作业,因此右手更容易发生CTDs.
上肢累积性工作伤害的产生与多种不同工作种类都有关,然而笨拙的姿势被认为是造成CTDs的主要风险[9];过度的施力和重复性的动作也是造成CTDs的风险因素[10]。由于CTDs多发生在使用手工具时,因此许多学者为降低和避免CTDS,针对手工具的设计/再设计作为主要研究主题[11-13]。所以针对与特定的作业进行上肢伤害的研究较为少见。针对平底锅铲作业,台湾学者吴水丕通过调查发现,平底锅铲作业时上肢的手肘、手部和肩部是发生不适情况较高的部位[14]。为了更好地分析菜勺使用过程中的上肢的作业情况,预防使用者上肢作业时由于不自然姿势和重复性的用力施力而造成伤害,降低和避免CTDs的发生,研究通过模拟勺汤实验,收集被试在勺汤过程中上肢关节的三维坐标,通过坐标值计算出关节活动角度和力矩,找出影响因素,以供菜勺使用人员参考。
1 研究方法
1.1 被试
实验招募4名大学生作为志愿者,均为男性,惯用手为左手,身体健康均没有肌骨骼伤害的病历。被试在实验之前均了解实验目的与过程,并签署实验知情书,登记个人基本信息,并在实验员的指导下独立完成实验。被试的基本数据年龄、身高、体重分别为20.5(±0.6)yrs,172.0(±5.8)cm,63.9(±9.5)kg.
1.2 实验器材
实验场地为封闭式房间,由于摄像机对外界光线干扰比较敏感,特别是在有阳光的情况下,因此,实验场在实验过程中保持封闭。实验数据的标定是通过英国OLM公司开发的VICON光学运动捕捉系统进行;通过配套软件Vicon Nexus软件进行实时采集三维坐标数据,以及进行坐标数据修补和出错处理。Nexus軟件处理后的三维坐标数据还需要通过SAS 9.0进行更细致的数据处理。
为了更好地分析勺汤作业,实验利用菜勺和架台组合成模拟装置,包括有3种不同型号的菜勺(小、中、大号)和2个架台。菜勺分成圆勺、勺杆和木制手柄3个部分,如图1所示;由于菜勺是不锈钢所制容易反光,为避免影响实验效果,将菜勺用哑光黑漆喷染。用ProE软件建模计算出每个部分的重量以及勺杆的中心位置,详细数据见表1;架台包括一个60 cm高和一个80 cm高,架台主要用来模拟灶台,实验中2个架台中心位置相离50 cm.
1.3 实验方法
VICON球直径14 mm,可以精确反映人体微细变化,通过人体关节运动带动反光球运动,经由感光器反射光线到红外线摄像机中,将人运动学数据传到系统中。实验中分别在被试的肩峰端(sz1)、肘关节(sz2)、上臂(sz3)、腕关节外侧(xz1)、第二指趾(xz2)和腕关节内侧(xz3)关节粘贴标志点。菜勺的标志点分别贴在勺杆的重心位置,圆勺的两侧中心处,如图2所示。通过标定的光点以定义各关节功能转动中心,实验过程中用100帧的频率收集数据。
1.4 实验步骤
被试进入实验室后,先记录其基本数据;然后由实验员指导被试熟悉实验装置的操作,说明注意事项,让被试进行反复实验,直到确保被试完全熟悉后开始实验。由于被试手臂上需要粘贴光点,为避免光点的移动影响实验数据,要求被试穿紧身衣服或者能赤裸手臂的服装。
被试熟悉实验操作后进行正式实验。先由实验员给被试贴好光点,然后进行静态动作采集,被试拿着菜勺进入摄像机摄制范围中,保持静态动作不变,实验员录制5 s的静态动作;静态动作录制后,进行刚体模型建立;模型建立后,被试分别用3种型号的菜勺进行实验,实验顺序随机安排。由于标定的光点不能沾水,所以菜勺勺水的重量在实验中用沙袋代替,沙袋的重量与相应菜勺水容量的重量一致。实验过程中被试要求模拟勺汤过程,将放有沙袋的菜勺从50 cm高的架台移到至80 cm高的架台,并将沙袋倒下,完成整个打菜作业;在实验过程中,被试的手腕需处于自然状态,腕关节不能进行屈曲活动。被试每种型号的勺子需要进行两次重复实验,每个被试需要进行6次实验(3种型号×2次),实验完成后进行簡短的休息就进入下次实验。
2 实验数据处理
研究中所涉及的X,Y,Z轴分别表示左右方向、前后方向、竖直方向,任意点的坐标用(x,y,z)表示。任意两反光球的距离可以用公式。
3 研究结果
3.1 肘关节活动分析
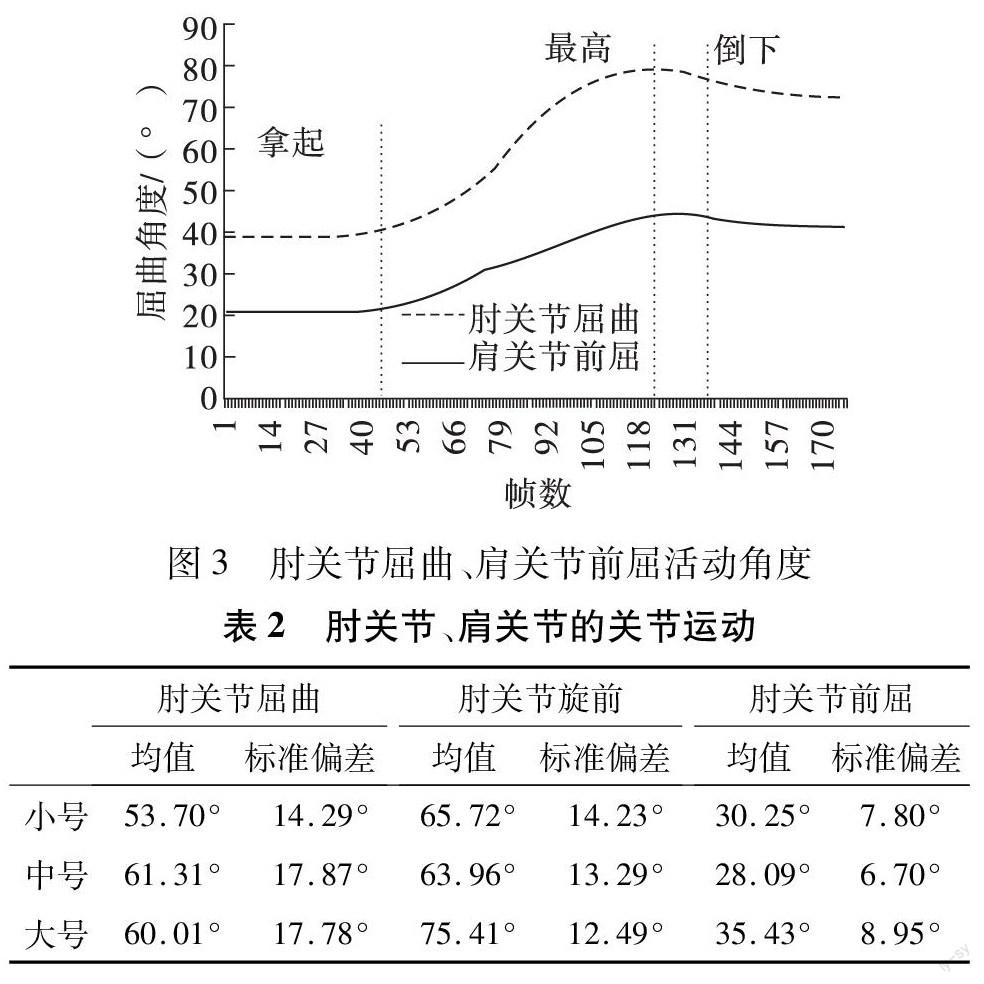
在模拟勺汤实验过程中,被试首先通过上肢进行屈曲运动将菜勺和重物从低台面上拿起;然后菜勺从低台面移至高台面上方,并将菜勺内的重物倒至高台面。试验要求被试手腕保持自然状态,腕关节不进行关节屈曲活动。因此整个过程中,主要通过肘关节和肩关节的屈曲、旋前完成作业动作。关节活动范围对作业活动能力有重要影响作用,如果关节活动范围超出了参考值会导致作业能力减弱,长此以往容易产生上肢伤害。
3.1.1 肘关节
肘关节在打菜过程中,先进行屈曲运动将重物拿起,并使菜勺保持水平平衡状态,将其从低台面移至高台面;到规定倒下重物位置后,通过旋前运动将勺内重物倒下。
对于肘关节的屈曲运动的范围,可以利用余玄定理对动作捕捉系统的数据进行分析,可知肘关节的屈曲范围计算公式为
α为肘关节屈曲范围;l1是肩峰端(sz1)到肘关节(sz2)的距离;l2肘关节(sz2)到腕关节外侧(xz1)的距离;l3是肩峰端(sz1)到腕关节外侧(xz1)的距离。
肘关节的屈曲运动的正常范围是0°~150°,通过计算结果可知,3种型号菜勺实验中,从小号到大号,被试肘关节屈曲范围的平均值分别为:33.55°至73.08°,38.13°至83.68°,37.18°至81.26°,均在屈曲参考值范围内。通过CORR分析发现,肘关节屈曲角度与身高存在负相关关系,相关系数为0.45(p<0.05),身高越高屈曲角度越小。
肘关节在倒下勺内重物时,旋前运动的范围可以利用腕关节外侧(xz1)、腕关节内侧(xz3)2个标志点的坐标确定;未旋转时,设2个标志点的位置分别在A1,B1,旋前运动至A2,B2,建立空间向量A1B1和
A2B2,并利用空间夹角公式计算旋前范围。
根据计算结果可知,被试的肘关节倒下重物时的旋前运动的范围最小有47.15°便将重物倒下,最大有需要旋转87.77°才将重物倒下的;而旋前的参考值范围是0°~80°,被试旋前角度过大,会导致作业能力较低,容易产生上肢累积性伤害;CORR分析发现,肘关节旋前的角度与指节高有正相关关系,相关系数是0.46(p<0.05)。
3.1.2 肩关节
肩关节在打菜作业中主要完成前屈运动,通过观察被试实验过程中没有进行超过90°的屈曲运动;利用肩峰端(sz1)到肘关节(sz2)的坐标数据进行分析,可知肩关节前屈运动的范围计算公式。
通过计算可知被试一个周期内上臂在前矢状面运动范围为12.95°至72.21°;屈曲的参考值范围是0°~180°.CORR分析结果表明,肩关节前屈角度与肩高有正相关关系,相关系数是0.51(p<0.05),肩高越高肩关节前屈角度越大。
ANOVA分析结果表明菜勺的型号对肘关节屈曲、肘关节旋前和肩关节前屈的活动范围均没有产生显著性影响(见表2)。
3.2 力矩分析
对于三维坐标值,本研究选定3个作业瞬间作为分析对象。第一个是被试刚拿起菜勺的瞬间,由于菜勺被拿起来之前是放置在固定台面的,其三维坐标是保持不变的,当实验开始,菜勺被被试拿起从而导致其坐标变化,尤其是Z轴坐标的变化最能反应菜勺拿起的程度,本文设定当Z坐标值变化大于或等于1 mm则认为菜勺被拿起,因此当Z坐标值差累积到大于或等于1 mm时,即将该瞬间的坐标值作为分析值;第二个瞬间是菜勺在整个作业中最高的位置,即Z坐标最大的位置;第三个瞬间是被试翻转菜勺将勺内沙袋倒下的瞬间,该瞬间的确定可以通过标定在圆勺两侧的标点坐标来确定,在翻转圆勺过程中,向上转的圆勺标点和向下转的圆勺标点在Z轴上的坐标差不断变化,当坐标差达到最大值时,可以认为圆勺已经竖立起来,从而将勺内沙袋倒下,因此可以通过两标点的Z坐标差来确定该分析点(如图3所示)。
计算力矩时使用的符号说明如下。
圆勺重量为Y;沙袋重量为S;杆重量为G;木制手柄重量为s;圆勺重心到杆重心的距离为Z1;杆重心到勺杆上端的距离为Z2;勺杆上端道手柄中心距离为Z3;第二指关节到肘关节的距离为L1;手腕关节到肘关节的距离为L2;肘关节到肩峰端的距离为L3;钢制勺与X-Y平面形成的夹角为θ1;下臂与X-Y平面形成的夹角为θ2;上臂与X-Y平面形成的夹角为
θ3;被试体重为D;重力加速度g=9.8 m/s2.
同时根据Webb Associate(1978)提供的数据,可知上臂、下臂、手占人体重的百分比分别为2.80%,1.70%,0.60%;根据Dempster(1955)提供的身体各部质量中心的位置,可知下臂质量中心为下臂长的43%的位置,上臂质量中心是上臂长的43.6%的位置。
3.2.2 结果分析
勺汤过程中,被试手臂3个部位的力矩曲线图如图4所示,从菜勺被拿起后,3个部分的力矩呈上升状态,但上升程度有所不同,以肩部的力矩上升幅度最大,肘部其次,手腕部位最小。通过ANOVA分析,动作瞬间对坐标数据有显著性影响(p<0.000 1),3个瞬间点的坐标数据显著不同,通过DUNCAN分析发现显著差异是由拿起瞬间所引起,最高(5.44 N·m,±2.53)和倒下(5.41 N·m,±2.52)瞬间没有显著差异,两者与拿起(4.29 N·m,±1.96)瞬间存在显著性差异。菜勺型号对坐标数据存在显著性影响(p<0.000 1),菜勺型号越大手臂3个部位的力矩越大,如图5所示。上肢部位对坐标数据产生显著影响(p<0.000 1),Duncan分析结果显示,肩部的力矩(7.22 N·m,±1.28)远大于手肘(5.88 N·m,±0.96)和手部(2.03 N·m,±0.45)的力矩。上肢部位和菜勺型号的交互作用也存在显著影响(p<0.000 1),动作瞬间和上肢部位的交互作用同样存在显著影响(p<0.000 1)。
4 结 论
研究主要探讨了菜勺作业时,使用者上肢的生物力学问题。通过模拟实验收集到上肢关节的三维坐标值,经过分析后发现肘关节屈曲和肩关节屈曲的角度均值分别为58.34°(±7.94°)、31.26°(±7.00°),均在参考的活动范围内;而肘关节在倒下作业时的旋前角度(68.36°,±13.76°)存在超出参考值范围的情况,容易产生不适影响作业能力。通过力矩分析结果表明,菜勺型号(p<0.000 1)顯著影响3个部位的力矩值,菜勺越大力矩值也相应增加。本研究仅探讨3种型号以及负荷值,而且3个负荷值之间的差距不大,因此未来研究可讨论更广泛的实验负荷条件,考虑更多的实验影响因素。
参考文献:
[1]Kim H,Querin OM,Steven G P.On the development of structural optimization and its relevance in engineering design[J].Design Studies,2002,23 (1):85-102.
[2]戴文涛,张非若,王正伦,等.重复性伸腕作业劳动负荷与前臂伸肌的表面肌电特征[J].中华劳动卫生职业病杂志,2006,24(4): 201-204.
[3]Chang S R,Park S,Freivslds A.Ergonomic evaluation of the effects of handle types on garden tools[J].International Journal of Industrial Ergonomics,1999,24:99-105.
[4]Nevala N,Lintula M.Ergonomics and the usability of mechanical singlechannel liquid dosage pipettes[J].International Journal of Industrial Ergonomics,2006,36:257-263.
[5]Aghazadeh A,Mital A.Injuries due to hand tools:results of a questionnaire[J].Applied Ergonomics,1987,18: 273-278.
[6]Hsu S H,Chen Y H.Evaluation of benthandled files[J].International Journal of Industrial Ergonomics,1999,25:1-10.
[7]Wu S P,Hsieh C S.Ergonomics study on the handle length and lift angle for the culinary spatula[J].Applied Ergonomics,2002,33:493-501.
[8]Mcgorry R W,Lin J H.Power grip strength as a function of tool handle orientation and location[J].Ergonomics,2007,50(9):1 392-1 403.
[9]Muggleton J M,Allen R,Chappell P H.Hand and arm injuries associated with repetitive manual work in industry:a review of disorders,risk factors and preventive measures[J].Ergonomics,1999,42 (5):714-739.
[10]Moore J S,Garg A.Upper extremity disorders in a pork plant:relationship between task risk factors and morbidity[J].Industrial Hygiene Association Journal,1994,55:703-715.
[11]Lee Y H,Jiang M S.An ergonomic design and performance evaluation of pipettes[J].Applied Ergonomics,1999,30:487-493.
[12]Li K W.Ergonomics design and evaluation of writetying hand tools[J].International Journal of Industrial Ergonomics,2002,30:149-161.
[13]吳水丕,白百剛.鍋鏟手柄彎曲角度之人因研究[C]//第一屆管理知識與技術提升學術研討會論文集,台北,2004.
[14]吴水丕,邱忠本,苏右伦,等.平底锅铲作业人员肌肉骨骼不适之调查[J].人因工程学刊,2010,12(1):1-10.
(责任编辑:严 焱)
