基于新型模型参考自适应的感应电机转速估算*
2017-05-24李谟发罗小丽刘万太石琼陈文明
李谟发,罗小丽,刘万太,石琼,陈文明
(湖南电气职业技术学院,湖南湘潭 411101)
基于新型模型参考自适应的感应电机转速估算*
李谟发,罗小丽,刘万太,石琼,陈文明
(湖南电气职业技术学院,湖南湘潭 411101)
在传统的(模型参考自适应系统)MRAS中,当电机低速运行时,转速估算不准确,针对该问题,现提出了一种基于转子磁链与电磁转矩误差同时使用的转速估算方法,可以改善无速度传感器矢量控制系统在低速区的性能。仿真结果表明所提出的转速估计方法在低速区的优越性。
模型参考自适应系统;无速度传感器;矢量控制;转速估算
0 引言
对于各行各业中用到异步电机矢量控制系统调速时[1],转速信息是必需的。转速可以通过传感器来测量或者通过电压、电流信号以及电机参数来估算。使用传感器测量转速,速度传感器不仅成本高,而且安装非常不便,在相对恶劣的条件下,速度传感器的测量精度也容易受到影响。所以研究无速度传感器的驱动控制系统成为了异步电机矢量控制系统调速的重要研究方向之一[1]。
对于异步电机无速度传感器矢量控制,已有专家学者提出了几种转速估算方法[2],这些方法可被分为两类:一是基于模型或者基于信号注入的观测器,基于模型观测器的主要缺点是在低速时性能不佳和参数敏感;二是基于转子磁链的MRAS,由Schauder[3]提出的,这种技术的缺点是对参数(特别是定子电阻)敏感,并且纯积分问题限制了电机在低速区域的运行性能。
1 异步电机矢量控制
转子磁链定向的控制系统[5]能实现电流完全的解耦控制,无需增加解耦器,并且不存在静态稳定性限制等条件,控制方式简单,具有较好的动态性能和控制精度,可获得和直流电机一样的线性机械特性,故异步电机中广泛采用按转子磁链定向的矢量控制系统,重点研究方向为估算转速精度高的无速度传感器矢量控制。
2 MRAS转速观测器
采用MRAS转速估计算法的误差信号可以为:转子磁链、反电动势和无功功率。而基于转子磁链的MRAS转速观测器[6]的估算准确性取决于转子磁链观测器与实际电动机的转子磁链的匹配程度。
2.1 传统的MRAS转速观测器
传统的MRAS方法用于估算转速时,通常以转子磁链作为误差信号[7],方程如下
(1)
假设转速的变化率低于电量的变化速度,并且选择合适的自适应规律,得到转速的辨识方程为
(2)
式中,Kp>0,Ki>0该自适应规律存在明显的直流偏移和纯积分问题。对于传统的MRAS转速观测器,其最主要的缺点是低速区的估算精确度较低且定子电阻对电压模型影响较大,因此提出新的MRAS转速估算方法,改善其低速区的估算准确性。
2.2 新型MRAS转速观测器
为适应外销贸易的需要,广彩匠人的早期产品为来样加工。逐渐主动转变为体现西方审美情趣的风格。广彩广泛借鉴西方绘画风格,从油画、版画、素描等绘画方式中学习借鉴,汲取宗教故事,寓言故事等灵感。同时,在欧洲的上流社会,定制自己家族的徽章纹瓷成为一种时尚,广彩制作了大量的印章纹瓷器。
在新的MRAS方法中,将有两种误差信号同时使用:一种为转子磁链之间的误差;另一种为电磁转矩之间的误差。电机电磁转矩的估算形式可以表示为[8]
(3)
由电机的式(4)可知负载变化将导致速度变化,直到电磁转矩等于负载转矩,到达新的平衡。
系统的运动方程为
(4)
那么,基于相同的原理,估算的转矩变化也将导致估算的速度变化直到估算转矩等于电磁转矩[8]。然后式(4)用电磁转矩和转速的估算量代替其实际量,可得到
(5)
将式(4)减去式(5),可得误差动态方程
(6)
为了使系统获得良好估算特性,必须同时考虑以下两个条件
(7)
根据确定传统的MRAS转速估算自适应规律相同的方法来确定新的MRAS自适应控制律,并且考虑转速的误差,因此转速的估算公式变为
(8)

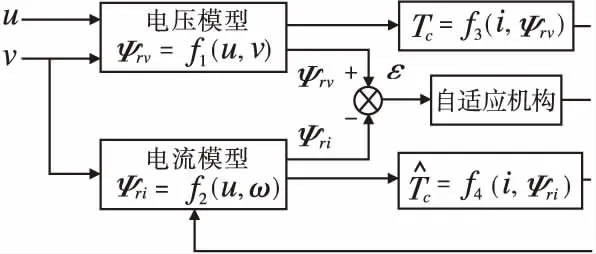
图1 新型MRAS转速估算模型框图
3 仿真实现
图2是基于MRAS估计转速的异步电机无速度传感器矢量控制系统框图。为实现电机在整个转速范围内的控制,加入了弱磁控制器获取准确转子磁链值。对框图在Matlab/Simulink中搭建仿真模型。系统的仿真实现中,异步电机的主要参数有:PN=2500W,UN=380V,fN=50Hz,Rs=0.435Ω,Ls=0.071H,Rr=0.816Ω,Lr=0.071H,Lm=0.069H,np=2,J=0.18kg·m2,φ=0.85Wb。
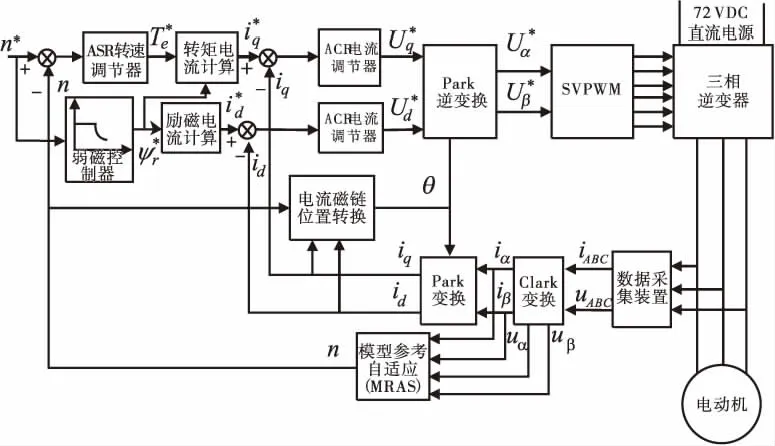
图2 基于新型MRAS的无速度传感器矢量控制系统框图
为检验所提出的速度估计算法在各速度区的估计效果以及控制性能和抗干扰性能,电机空载启动,0.35s时加30N·m的负载,速度给定情况如表1所示。转速响应波形如图3所示,估计转速波形如图4所示。
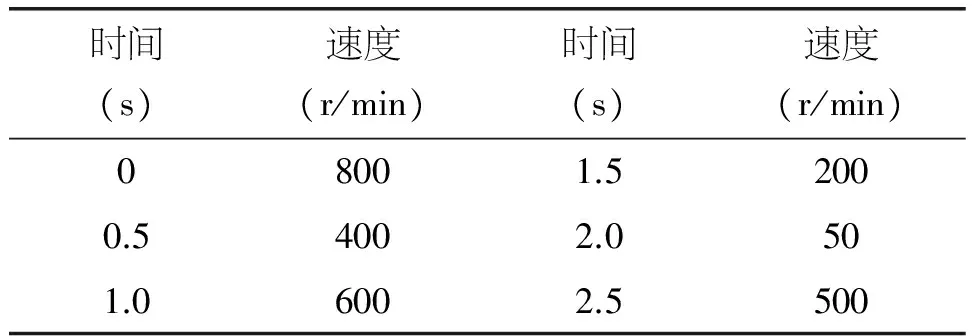
表1 速度给定情况

图3 转速响应波形
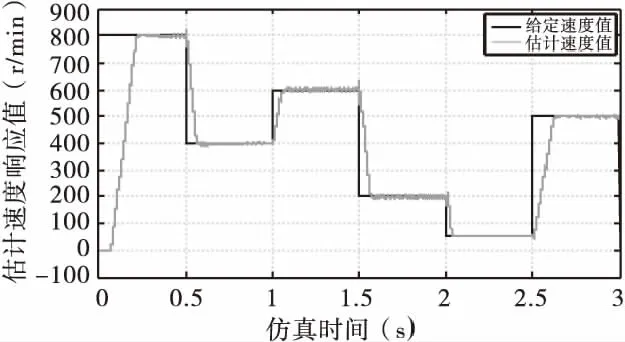
图4 估计转速波形
仿真结果从图4的转速响应波形可以看出,系统很快进入稳定状态,实际转速即快速又准确的跟随给定速度,在全速区域内仿真效果都较理想。突加负载后,转速降落较小并能迅速恢复,表明该系统的运行特性好,并具备较强的抗干扰能力。
由图4的估计转速波形可以看出,转速估计值可以快速准确收敛到实际值,跟踪效果良好,应用新的转速估算方法,使得速度在低速区估计效果也较为理想。
由图5估计速度偏差波形可知,速度估计偏差基本在3r/min左右,在低速时估计转速偏差更小,说明所提出的基于新型MRAS速度估计算法具有较高的估计精度和响应速度。
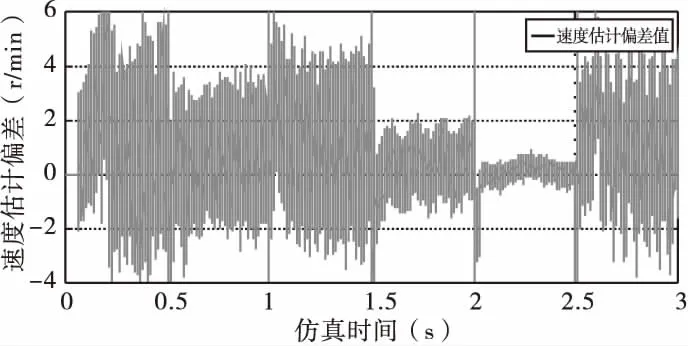
图5 估计速度偏差波形
由图6电磁转矩响应曲线可以看出,转矩脉动较小并响应快速准确,速度给定变化过程中,转矩能够迅速收敛到负载转矩附件,且波动较小,可知电机可以获得较好的调速性能。
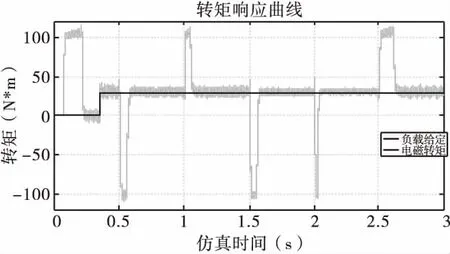
图6 转矩响应波形
4 结语
通过仿真结果可以证明本文所提出的新型MRAS转速估算方法以及整个系统控制策略是切实可行的,此方法能够在一定程度上克服传统MRAS转速估算在低速区速度估计不准的问题,也取得了较好的估计效果,在电机运转高、低速区域内都有良好的估算精度,电机静态和动态性能稳定。
[1] 吴婷.基于MRAS的模糊自适应异步电机矢量控制的研究[D]. 湘潭:湘潭大学,2010.
[2] 陈伯时,杨耕.无速度传感器高性能交流调速控制的三条思路及其发展建议[J].电气传动,2006,36(1):1-4.
[3] C. Schauder, Adaptive speed identification for vector control of induction motors without rotational transducers, IEEE Trans. Ind. Appl. 28 (5) (1992)1054-1061.
[4] B. Karanayil, M. F. Rahman, and C. Grantham, “An implementation of a programmable cascaded low-pass filter for a rotor flux synthesizer for an induction motor drive,”IEEE Trans. Power Electron., vol. 19, no. 2,pp. 257-263, Mar. 2004.
[5] 陈伯时,陈敏逊. 交流调速系统第2版[M],北京:机械工业出版社,2005.
[6] 廖勇,张凤蕊. 无传感器矢量控制系统及其速度估算的研究[J],电工技术学报, 2004,19(2):36-40.
[7] driss Benlaloui,Said Drid,Larbi Chrifi-Alaoui,and Mohammed Ouriagli“Implementation of a New MRAS Speed Sensorless Vector Control of Induction Machine”IEEE Trans. Ind. Electron,pp.1556-1563,2014.
[8] Saqib Rind, Yaxing Ren,Lin Jiang“MRAS based Spe-
ed Sensorless Indirect Vector Control of Induction Motor Drive for Electric Vehicles”Trans. Ind. Electron,pp.978-985,2014.
声 明
为扩大本刊及作者知识信息交流渠道,加强知识信息推广力度,本刊已许可中国学术期刊(光盘版)电子杂志社在CNKI中国知网及其系列数据库产品中,以数字化方式复制、汇编、发行、信息网络传播本刊全文。该著作权使用费及相关稿酬,本刊均用作为作者文章发表、出版、推广交流(含信息网络)以及赠送样刊之用途,即不再另行向作者支付。凡作者向本刊提交文章发表之行为即视为同意我编辑部上述声明。
《防爆电机》编辑部
Estimation for Rotating Speed of Induction Machinebased on A New Type of MARS
LiMofa,LuoXiaoli,LiuWantai,ShiQiong,andChenWenming
(Hunan Electrical College of Technology, Xiangtan 411101, China)
In traditional MRAS (model reference adaptive system), it is not accurate to estimate rotating speed of motor running at low speed. Aimed at this question, this paper proposes a new kind of estimation method based on errors of combining rotor flux link with electromagnetic torque, which can improve performance of vector control system of speed senseless at low-speed zone. The simulation result indicates that the proposed method of estimating rotating speed has obvious superiorities at low-speed zone.
MRAS;speed senseless;vector control;rotating speed estimation
湖南省风力发电机组及控制重点实验室开放基金项目(项目编号22016FLFDYB05,22016FLFDYB04)
10.3969/J.ISSN.1008-7281.2017.02.01
TM346
A
1008-7281(2017)02-0001-004
李谟发 男 1986年生;硕士研究生,湖南工业大学电力电子传动及控制专业,现从事电机特性分析与控制、电力电子及应用与分布式新能源发电等方向的研究.
2016-11-30