船舶伺服排缆Lebus滚筒多电机控制的研究
2017-05-24陈福康
鲁 润,陈福康
船舶伺服排缆Lebus滚筒多电机控制的研究
鲁 润,陈福康
(上海海事大学商船学院,上海 201306)
针对船舶伺服排缆Lebus滚筒多电机协同控制易受负载扰动和电机参数摄动影响的问题,本文提出了基于并行控制、相邻耦合控制、耦合误差同步控制的多电机动态协同控制系统,解决驱动电机动态偏差导致的准确性不足的问题;针对系统较强的非线性及不确定性,采用基于最小相关轴处理方法设计系统消除跟踪误差和同步误差控制器,将每一轴电机的跟踪误差和相邻轴电机的同步误差相结合,减少控制器数量。设计了船舶伺服排缆Lebus滚筒3轴协同控制系统,仿真结果表明,该方法具有较强的鲁棒性、动态快速性和同步精度。
船舶 伺服排缆 Lebus滚筒 多电机控制 同步控制
0 引言
智能制造的关键是依靠云计算、大数据和互联网推动复杂系统中的多电机协同控制,协同控制是基于现代数学和协同学的状态空间方法上的非线性反馈控制。随着对多电机系统协同性能的深入研究,传统的控制系统已经很难满足市场的需求,对大型生产设备控制系统的性能要求也越来越高,因而多电机协同控制已成为现代制造业中存在的核心问题之一[1]。多电机协同控制策略在船用多点系泊自适应控制系统、自升式平台多电机等时同步控制、船舶伺服排缆Lebus(里巴斯/双折线)滚筒多电机控制等其他各行各业中的应用也越来越广泛。协同控制性能的好坏直接关系到系统的可靠性和产品生产中的质量问题。因此,开展对多电机协同控制系统性能的研究具有十分重要的理论价值和应用价值。
目前,多电机系统同步控制主要分为两大类:非耦合控制和耦合控制。非耦合控制主要包括三种同步控制方式主从控制、并行控制和虚拟总轴控制[2]。由于非耦合控制策略电机之间没有耦合,任一台电机上发生的扰动不会影响到其他电机,因此这种策略的同步性能较差。1980年koren最初提出并联交叉耦合控制,但这种控制策略难以确定3台以上电机的补偿规律[3]。随后,21世纪初期,shih提出适用于3台电机以上的相邻交叉耦合控制策略,以及各国学者陆续提出的偏交叉耦合控制、环形耦合控制等,都取得了较好的控制效果[4-5]。近年来,更多的学者将模糊控制、神经网络控制、鲁棒控制和自适应控制的控制算法应用于多电机系统协同控制中,进一步提高控制系统的控制精度、鲁棒性和稳定性等系统性能[6-8]。但是,以上控制策略都是基于各参数时刻保持同步的情况下,对于多电机系统中各参数保持一定的比例关系的情况则没有考虑。并且以上控制策略随着电机数量的增加,导致控制器运算复杂、计算工作量极其巨大。
针对上述存在的这些问题,本文将并行控制与相邻交叉耦合控制相结合,并在控制结构中考虑同步系数,提出一种基于并行控制、相邻耦合控制、耦合误差同步控制的多电机动态协同控制策略,解决驱动电机动态偏差导致的准确性不足的问题。同时在控制器结构设计上,采用将每一轴电机的跟踪误差和相邻轴电机的同步误差相结合的方式,减少控制器数量,实现船舶伺服排缆Lebus滚筒多电机协同精确控制。
1 多电机动态协同控制
基于最小相关轴数目同步控制理论,将系统中的任何一台电机利用其相邻的电机的同步误差进行补偿。假定同步系统中n台电机之间关系为:::….=::….:
即:

(1)

(2) (3)
将系统分为(n,1,2),(1,2,3),…,(i-1,i,i+1),…,(n-1,n,1)n个子系统,系统中的每轴电机只能和与之前后相邻的两轴电机相关。在每个子系统内,要使系统按照比例稳定运行,则应使跟踪误差和同步误差、都收敛于零,即应满足下式成立。

(4)

(5)
则第i轴的控制函数设计为:

(6)
由式(2)(3)(4)(6)可得:

(7)
则第i轴的跟踪误差控制函数为:

(8)
第i轴的同步误差控制函数为:

(9)
则第i轴的控制函数为:

(10)
因此根据式(8)(9),在每个同步子系统中由1个跟踪误差控制器和1个同步误差控制器组成。则多电机动态协同复合控制结构如图1所示,其中~为同步系数,系统中包含2n个控制器,与传统相邻交叉耦合控制相比减少了控制器的数量。
2 船舶伺服排缆Lebus滚筒多电机协同控制系统
Lebus滚筒能很好地解决多层卷绕排缆的问题[11],伺服排缆整齐的关键在于Lebus滚筒控制,但Lebus滚筒多电机协同控制易受负载扰动和电机参数摄动影响,使Lebus滚筒达不到伺服排缆快速性、精确性的要求。设计的船舶伺服排缆Lebus滚筒控制系统结构如图2所示:采用西门子SINUMERIK 840Dsl控制单元;AIM接口模块,包含一个电抗器、电网净化滤波器和抗干扰抑制器;ALM电源模块,为受控的整流/回馈模块;SMM电机模块,单轴电机模块;DMM电机模块,双轴电机模块;SMC30编码器接口模块,连接主轴的编码器;ENCODER编码器模块;SINUMERIK CPU,840D sl数控系统CPU;MCP483C PN,操作面板;HMI,显示面板;Hand wheel,手摇轮手柄;PP72/48D PN,系统I/O输入输出控制系统其他辅助设备,与NCU之间采用Profibus-DP通讯;PC上位机,用于监控、调试、编程。
船舶伺服排缆Lebus滚筒控制系统如图3所示,伺服排缆Lebus滚筒能将钢丝绳的定位控制准确,钢丝绳爬升时既能抬升钢丝绳又不挤压下层钢丝绳,减少磨损,实现钢丝绳的整齐排列。
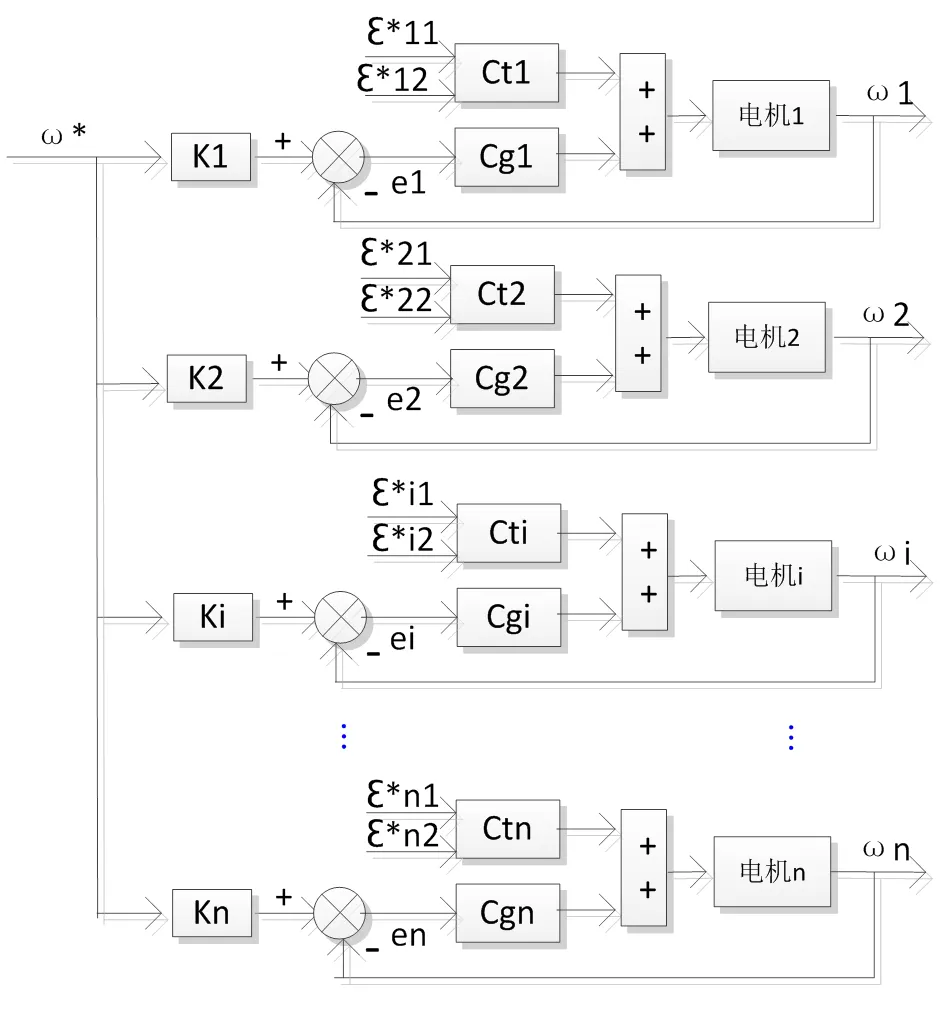
图1 多电机动态协同控制结构
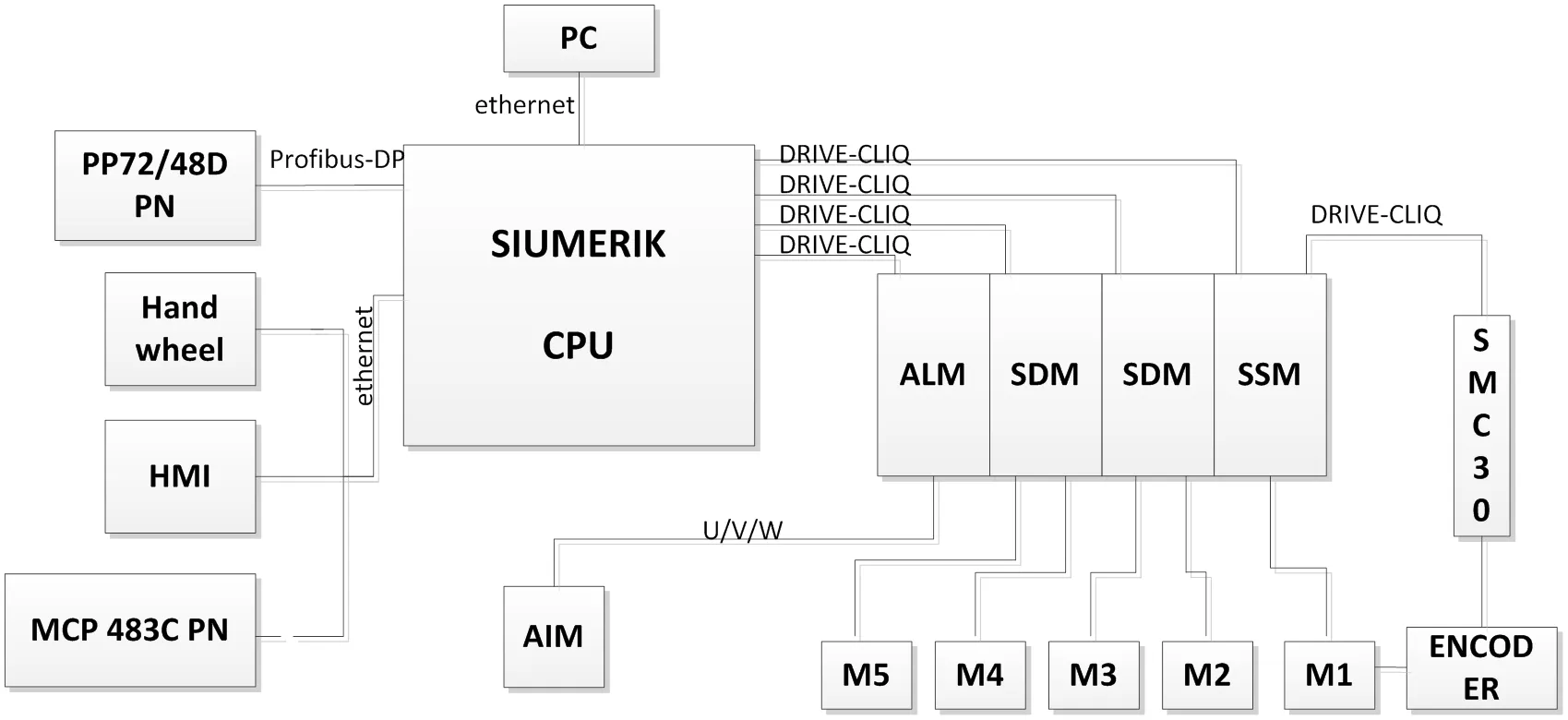
图2 船舶伺服排缆Lebus滚筒控制系统结构图
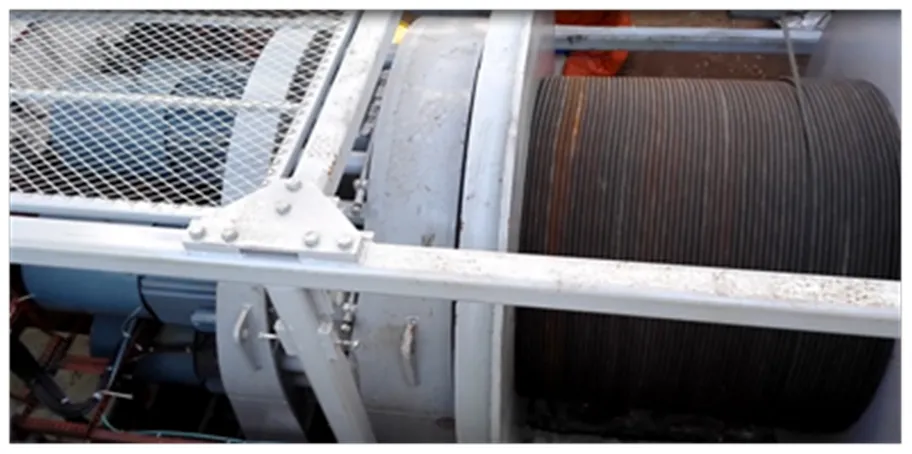
图3 船舶伺服排缆Lebus滚筒控制系统图
3 结果分析
3.1系统及参数设置
针对船舶伺服排缆Lebus滚筒多电机协同控制系统,其X轴、Y轴和Z轴的3台电机为控制对象,进行并行控制、相邻耦合控制和耦合误差同步控制实验,控制系统原理如图4所示。
3.2 实验对比
在传统的非交叉耦合多电机协同控制和多电机动态协同复合控制2种控制策略下,采用电机载荷扰动方式对多电机协同控制结构作对比实验,如图5、6所示。

图4 船舶伺服排缆Lebus滚筒多电机协同控制系统原理图

表1 3台电机的参数设置

(a)负载扰动下电机输出转速
(b)电机同步误差曲线
图5 非交叉耦合结构协同控制电机实验曲线
3.3实验结果分析
1)由图5(a)可知,在传统的非交叉耦合多电机协同控制系统中电机启动时,电机间转速存在滞后问题,启动期间转速波动较大,直到0.2 s时3台电机速度趋于稳定同步。设定在0.4 s时刻给电机1增加负载扰动,在0.4 s到0.48 s这段时间里,3台电机间转速波动较大,直至0.48 s时3台电机的转速才趋于稳定,并且电机转速降低,受负载扰动影响时间为0.08 s。从图5(b)中可以看出系统在启动过程和受到负载扰动过程中,电机间同步误差变化较大。当系统中某一轴电机受到负载扰动或者突变时,其他各轴电机的运行状态将会受到影响,系统出现较大的同步误差。
2)由图6(a)可知,在多电机动态协同控制系统中电机启动时,电机间转速波动与非交叉耦合控制系统相比得到明显改善,启动平稳,到0.1 s时3台电机速度趋于稳定同步。设定在0.4 s时刻给电机1增加负载扰动,出现小幅同步误差,3台电机的转速降低,过度平稳,到0.42 s时3台电机的转速趋于稳定同步,受负载扰动影响时间为0.02 s。从图6(b)中可以看出系统在启动过程有一定同步误差,同步误差8%,在0.4 s载荷扰动过程中,出现小幅同步误差,但很快恢复稳定。可以看出,电机间同步误差相对于传统的非交叉耦合多电机协同控制,多电机动态协同控制结构具有更好的系统性能。
4 结论
1)针对船舶伺服排缆Lebus滚筒多电机协同控制的不足,提出了一种基于并行控制、相邻耦合控制、耦合误差同步控制的多电机动态协同控制方案,实现了多电机比例协同控制,为船舶伺服排缆Lebus滚筒多电机协同控制提供参考。
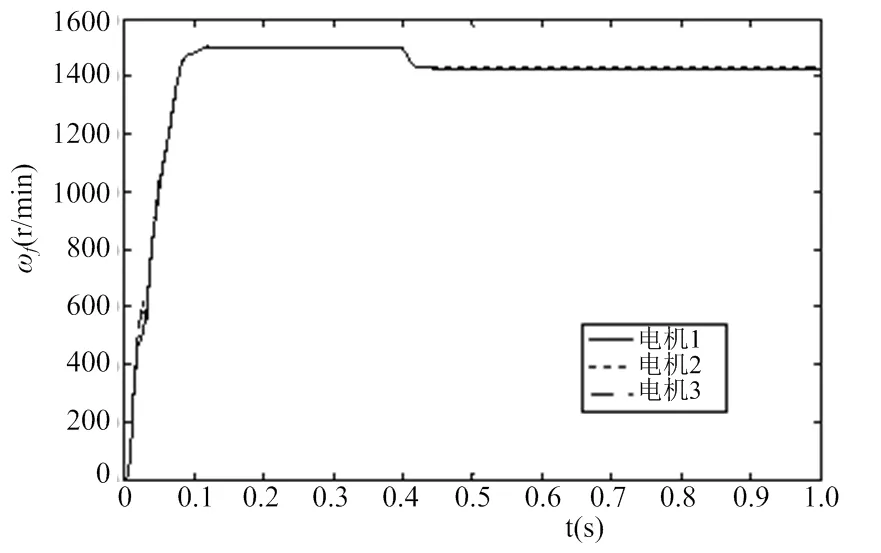
(a)负载扰动下电机输出转速
(b)电机同步误差曲线
图6 多电机动态协同控制电机实验曲线
2)研究了一种消除跟踪误差和同步误差的控制算法,它能使系统更快速的达到稳定状态,与传统控制器相比较,减少了控制器数量,且简化了控制结构的复杂程度,具有更好的动态性能和同步精度。
3)设计了船舶伺服排缆Lebus滚筒多电机协同控制系统,克服负载扰动和电机参数摄动对同步精度影响的问题,使Lebus卷筒能将钢丝绳的定位控制准确,且在钢丝绳爬升时既能抬升钢丝绳又不挤压下层钢丝绳,减少磨损,实现钢丝绳的整齐排列。
综上所述,船舶伺服排缆Lebus滚筒多电机协同控制具有较高的实用价值,对船用多点系泊自适应控制系统、自升式平台多电机等时同步控制等具有重要指导意义。
[1] Fucai L, Zhang Xuelian. Internal Model Control of Multi-motor Synchro-coordinate Driving in Compensation[J]. Electric Drive, 2002, 32(3):11-13.
[2] 高德超.多电机系统协同控制研究[D]. 济南大学, 2015.
[3] KOREN,Y. Cross-Coupled Biaxial Computer Controls for Manufacturing Systems[J]. Journal of Dynamic Systems Measurement & Control, 1980, 102(4):265-272.
[4] 彭晓燕,刘威,张强. 基于改进型偏差耦合结构的多电机同步控制[J].湖南大学学报:自然科学版, 2013, 40(11):77-83.
[5] 刘然,孙建忠,罗亚琴,等.基于环形耦合策略的多电机同步控制研究[J]. 控制与决策, 2011, 26(6):957-960.
[6] 胥小勇, 孙宇,蒋清海. 改进型相邻耦合结构的多电机比例同步控制[J]. 仪器仪表学报, 2012, 33(6):1254-1260.
[7] Liu R, Sun J Z, Luo Y Q, et al. Research on Multi-Motor Synchronization Control Based on the Ring Coupling Strategy for Cutterhead Driving System of Shield Machines[J]. Applied Mechanics & Materials, 2011, 52-54:65-72.
[8] Shi T, Liu H, Geng Q, et al. Improved relative coupling control structure for multi-motor speed synchronous driving system[J]. Iet Electric Power Applications, 2016, 10(6):451-457.
[9] 肖海峰, 李凯.改进型相邻耦合误差的多电机同步控制策略[J].自动化与仪器仪表, 2014(9):148-149.
[10] 张承慧,石庆升, 程金.一种基于相邻耦合误差的多电机同步控制策略[J].中国电机工程学报, 2007, 27(15):59-63.
[11] 胡水根. 卷筒折线绳槽爬台的理论尺寸分析[J].建筑机械, 2011(11):99-101.
Multi- motor Control of the Lebus Roller of the Ship's Servo Cable
Lu Run, Chen Fukang
( Merchant Marine Academy, Shanghai Maritime University, Shanghai 201306, China)
TM921.541
A
1003-4862(2017)04-0010-05
2016-11-16
国家自然科学基金项目(编号51179102)
鲁润(1993-),男,硕士研究生。研究方向:多电机协同控制技术与应用研究。
E-mail:lurun2016@163.com