基于云神经网络自适应逆系统的电力系统负荷频率控制
2017-05-23吴忠强杜春奇
吴忠强,张 伟,李 峰,杜春奇
(燕山大学 电气工程学院 工业计算机控制工程河北省重点实验室,河北 秦皇岛 066004)
0 引言
电力系统负荷频率控制LFC(Load Frequency Control)[1]的主要目标是保持系统频率在指定的误差范围内,以最低的成本提供足够的与之匹配的负载。电力系统由互联的大型发电机组组成,它们通常被定义为电力系统的控制区域。互联电力系统依赖自动发电控制以确保发电机的输出遵循电力负荷需求的变化。不间断供电、低运行成本是电力系统的重要指标。因此,研究高电压传输系统中,大型互联集中式能源发电、可再生能源发电对输电系统可靠性和安全操作的影响非常重要。
文献[2]设计了比例积分(PI)控制器用于负荷频率控制,结合遗传算法确定PI控制器的最佳增益,提高了控制器的动态性能,并保持最大频率偏差和联络线交换功率偏差在特定的范围内变化。该方法基于传统PI控制,便于设计且理论成熟,但上升时间长、超调量大。文献[3]建立了计及风电有功输出波动的负荷频率控制模型,引入模型预测控制技术,提出负荷频率分散预测控制策略,避免了风功率波动叠加至区域控制偏差ACE(Area Control Error)信号中所引起的不确定问题。但是该设计是建立在风功率预测精度能够满足应用要求的基础上的,而高精度风功率预测模型很难获得。文献[4-5]采用人工神经网络控制器代替传统的PI控制器,解决了传统PI控制器超调量大的问题,实现了频率快速稳定,但是并没有考虑扰动的影响并加以消除。文献[6]提出一种基于线性矩阵不等式LMI(Linear Matrix Inequality)算法的适用于双区域互联电力系统的分散输出反馈控制方案,在L2增益下减弱外部扰动的影响。文献[7]通过最小化负荷频率误差指标函数动态调节模糊神经网络的参数,显著提升了控制器的自适应能力,但在快速性和精度方面欠缺。文献[8]提出一种神经网络积分滑模控制器处理含风电场的电力系统负荷频率控制问题,采用神经网络逼近电力系统的不确定性,系统具有很好的渐近稳定性。
传统的反馈控制方式是将系统输出和干扰混合后反馈到输入,以提高系统性能并抑制干扰,因此在跟踪性能和抗扰性能之间只能折中实现。自适应逆控制对系统动态响应的控制和扰动消除是分别进行的,二者互不影响,可在提高系统动态性能的同时尽可能消除干扰。本文考虑风电的影响,对区域互联电力系统,设计了基于云神经网络自适应逆系统的负荷频率控制器。风电恒定部分(与预测值相当)被电力系统利用,风电偏差与负荷变化量一起被消除。由于风电偏差使综合负荷波动变大,所以需要具有更强干扰抑制能力的控制器,自适应逆控制将跟踪性能与扰动消除分开考虑,有很强的扰动消除能力,非常适用于此系统。采用云神经网络辨识系统模型和逆模型,所设计的辨识器收敛速度快,能够对系统的参数变化快速辨识。设计出的控制器不仅可以得到好的动态响应,还可以使风电及负荷扰动的影响减小到最小。
1 互联电力系统的负荷频率控制模型
电力系统频率变化主要取决于系统总的有功功率平衡状态。对于区域互联电力系统,由于影响电网频率变化的风功率主要集中在中、低频范围内,当负荷频率变化不大时,负荷频率控制系统可以用线性模型表示。互联电力系统负荷频率控制模型如图1所示[8]。 图中,Tgi为区域 i的调速器时间常数;Tti为区域i的再热式汽轮机时间常数;Ri为区域i的调速器调节常数;Bi为区域i的频率偏差系数;Di为区域i的负荷阻尼系数(标幺值);Mi为区域i的机组惯性常数(标幺值);ACEi为区域 i的控制偏差;Δfi为区域i的频率偏差;ΔPL,i为区域i的有功负荷变化量;ΔPwind,i为区域i的风电有功输出与预测值之间的偏差;ΔPtie,i为区域 i的净交换功率偏差。
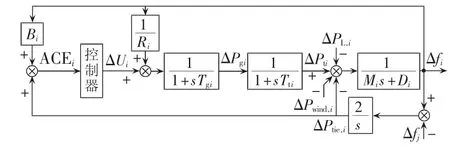
图1 区域i负荷频率控制模型Fig.1 Load frequency control model of area i
由图1可看出,区域i的ACEi信号由本区域的频率偏差Δfi和净交换功率偏差ΔPtie,i综合构成。

2 互联电力系统模型转换及离散化
为了便于自适应逆系统的设计,需要求出以ΔUi为输入、ACEi为输出的传递函数,因此将图1转换为以ΔUi为输入、ACEi为输出的开环结构,如图2所示。
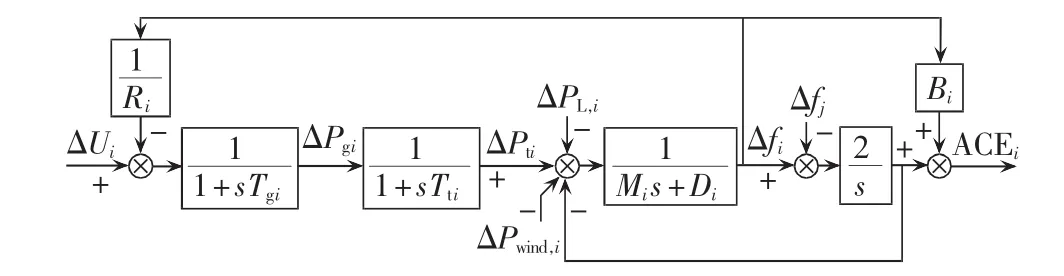
图2 区域i负荷频率控制的等效模型Fig.2 Equivalent model of load frequency control for area i
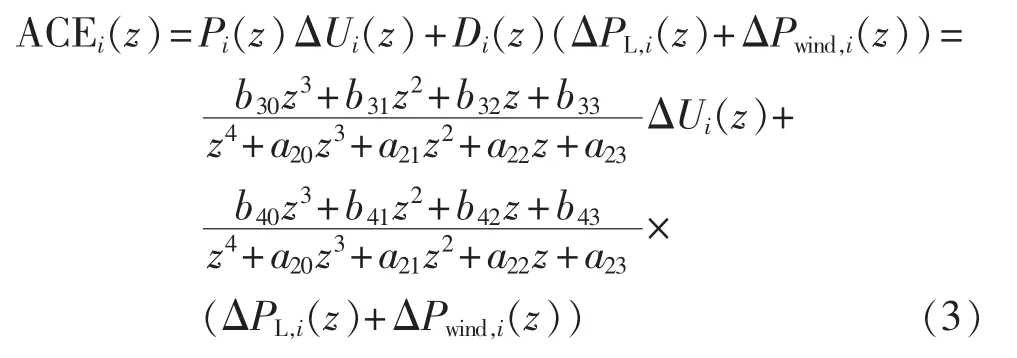
区域i电力系统的开环传递函数可表示为:


其中,Pi(s)为 ΔACEi(s)对 ΔUi(s)的传递函数;Di(s)为 ΔACEi(s)对 ΔPL,i(s)+ΔPwind,i(s)的传递函数。
对该传递函数离散化,可得传递函数如下:
3 基于云神经网络自适应逆控制的负荷频率控制实现
3.1 自适应逆控制的扰动消除原理
自适应逆控制将对系统响应的控制和对系统扰动的消除这2个问题单独进行处理。在这种控制方式下,动态过程控制不会因需要减小系统扰动而做出牺牲;系统扰动的消除也不会因动态控制的需要而做出牺牲,利于使系统响应和扰动消除同时达到最优。区域互联电力系统基于自适应逆控制的扰动消除原理如图3所示。

图3 互联电力系统区域i扰动消除原理Fig.3 Disturbance elimination principle of area i in interconnected power system
图中,Pi(z)为互联电网模型;为利用云神经网络辨识 Pi(z)得到的模型;Cik(z)为控制器;Qik(z)为扰动消除器。系统的扰动消除原理为:复制的(非常接近于无扰动的 Pi(z))和对象 Pi(z)的输入相同,受扰对象的输出与的输出之差即为对象扰动ΔPL,i(z)+ΔPwind,i(z),经单位延迟 z-1输入给滤波器 Qik(z)(即扰动消除器),Qik(z)是的一个最小二乘逆,再将z-1Qik(z)的输出反馈到对象输入中和扰动相减以实现对象扰动的消除。Cik(z)也是的一个最小二乘逆与无扰动对象相乘实现系统输出对输入 ri(z)的跟踪。
可看出,自适应逆控制中,将带有外部扰动的系统与其辨识模型相减,得到外部扰动信号,再代入控制器可动态消除外部扰动,而不影响系统的跟踪性能。
在Qik(z)前面的单位延时,是考虑数字反馈链路在环绕每一个回路上都至少有一个单位的延时。因此,系统扰动 ΔPL,i(z)+ΔPwind,i(z)的当前值仅能用来消除其将来值,而不能用作自身的瞬时消除。紧急开关用于:在闭合扰动消除回路之前,应使收敛并接近Pi(z),此时对象输出和模型输出的差值接近。在系统运行中,如果在Pi(z)上有一个突然大的变化,该条件被破坏时,利用紧急按钮切除扰动消除器,直到满足该条件,才能再次投运,以防不稳定的情况发生。
3.2 云神经网络
考虑到区域电力系统的模型参数会发生变化,使用云神经网络作为辨识器。云神经网络将云模型与神经网络相结合,具有神经网络的快速学习和高度逼近能力,同时又将云模型的模糊性和随机性引入形成的新网络。云神经网络已在风力发电[9-10]、故障诊断[11-12]、模式识别[13-14]中得到广泛应用。
3.2.1 云定义
设U为一个定量论域,X⊆U,T为U空间上的一个定性概念,μ(x)ϵ[0,1]为元素 x(xϵX)在 T 所表达定性概念的隶属度值(或称x与T的相容度),它是一个具有稳定倾向的随机数,概念T从论域U到空间[0,1]的映射在数域空间的分布称为云,即:

3.2.2 云模型
云模型有3个数字特征:期望Ex、熵En和超熵He,这3个数字特征用来反映定性概念到定量概念的映射关系。期望Ex是所有描述定性概念的数域空间中最具有代表性的点,是整个云滴群的重心;熵En用来反映隶属度对定性概念的度量准确性,熵越大,则表示概念越模糊,它是由概念的模糊性和随机性决定的;超熵He是对En的进一步度量,反映了熵的不确定性,是由熵的模糊性和随机性决定。
正态云模型是产生泛正态分布的算法,它利用期望Ex、熵En和超熵He这3个独立的数字特征,通过二阶正态分布在论域空间生成泛正态分布的云滴drop(x,μ(x)),由高斯隶属函数计算得出云滴的确定度,构造出定性概念及其定量表示之间的转换算法。正态云模型如图4所示。

图4 Ex=0的正态云模型Fig.4 Normal cloud model for Ex=0
在已知云模型(Ex,En,He)的前提下,特定条件x=x0下的云发生器称为X条件云发生器;在特定条件μ0=μ(x)下的云发生器称为Y条件云发生器,其中μ0为已知的特定隶属度,所以Y条件云发生器也称为隶属度条件发生器[13]。
3.2.3 云神经网络结构
云神经网络实际上是一个从定性到定量映射的条件云发生器,利用了云模型的模糊性和随机性特征,将每一个输入变量转换为一组随机分布的不确定数,这些随机数相互独立,但都以云模型的3个数字特征为分布,根据云的数字特征产生若干云滴。云神经网络结构包括5层,分别为输入层(m个输入)、使用X条件云发生器的云化层、隐含层(传递函数为f(),节点数为l个)、使用Y条件云发生器的逆云化层和输出层(n个输出)。
当输入为 xi(i=1,2,…,m),则云化层的输出为:

其中,GX()为X条件云发生器。
隐含层输出为:

其中,为可调权值为阈值。
逆云化层输出为:

其中,wij为可调权值,wi0为阈值;o0=-1。
网络输出为:

其中,GY()为Y条件云发生器。
4 区域电力系统的云神经网络辨识器设计
对设计云神经网络辨识器,采用 3.2.3 节的云神经网络,简记为NNⅠ。NNⅠ的结构由图2中的 Pi(z)确定。 由式(3)可得 Pi(z)的差分方程为:

其中,u 代替 ΔUi,y 代替 ACEi,为下面叙述方便,省略下标 i。
由式(8)可确定 NNⅠ的输入层(m=8)为:

其中,(k)为 y(k)的估计。
隐含层节点数取20。f(x)取单极性Sigmoid函数
输出层只有一个神经元(n=1),其输出y(k+1)的估计为(k+1)。
辨识指标为:

采用具有动量项的调整算法,可得NNⅠ输出层权值修正公式:

NNⅠ隐含层权系数修正公式为:

5 区域电力系统逆模型云神经网络辨识器设计
由图2可看出,区域电力系统自适应逆控制中的控制器和扰动消除器 Qk(z)都是系统模型Pi(z)的逆模型,所以需设计逆模型云神经网络辨识器,简记为NNⅡ。由式(8)可得系统逆模型的差分方程为:

由式(13)可确定 NNⅡ的输入层(m=8)为:

其中,(k-1)为 u(k-1)的估计。
隐含层节点数取 20,f(x)仍取单极性 Sigmoid函数。
输出层只设一个神经元(n=1),为逆模型输出的估计(k-1)。
逆模型的辨识指标为:

采用具有动量项的调整算法,可得NNⅡ输出层权系数修正公式:

NNⅡ隐含层权系数修正公式:

6 仿真研究
对含风电的两区域电力系统进行负荷频率控制的仿真研究,验证基于云神经网络的自适应逆控制器的有效性。电力系统的参数来源于文献[15],其中第 1 个区域参数为 Tg1=0.4 s,Tt1=0.5 s,R1=0.05,B1=20.6,D1=0.6,M1=5;第 2 个区域参数为 Tg2=0.3 s,Tt2=0.4 s,R2=0.0625,B2=16.9,D2=0.9,M2=4。 取 Ex=0、En=7 和 He=0.2。
第1个区域的模型及逆模型的神经网络离线辨识训练曲线如图5所示。第2个区域类同,略去。离线辨识的权值作为网络的初始值,并在实际控制中,通过沿系统输出误差(ΔACEi-0)的负梯度方向对权值进行微调以保证自适应性和实时性。

图5 第1个区域神经网络离线辨识误差曲线Fig.5 Off line identification error of neural network for area 1
某风电场有功输出与预测值之间的偏差和负荷变化特性曲线如图6、7所示,图中功率均为标幺值。
采用云神经网络自适应逆控制器实现对负荷频率的控制,得到区域频率偏差和ACE响应如图8所示,图中频率偏差与ACE均为标幺值,后同。图中也给出了采用传统PID控制器和采用文献[16]方法的控制结果用于比较,采用Ziegler-Nichols法确定PID控制器参数:比例系数为kp1=0.058,kp2=0.061;积分系数为 kⅠ1=0.064,kⅠ2=0.069。
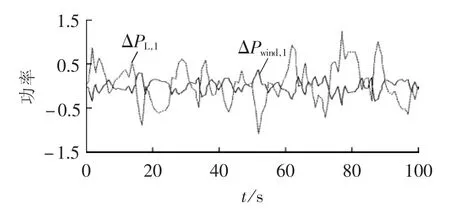
图6 第 1 个区域 ΔPwind,1和 ΔPL,1变化曲线Fig.6 ΔPwind,1and ΔPL,1for area 1

图7 第 2 个区域 ΔPwind,2和 ΔPL,2变化曲线Fig.7 ΔPwind,2and ΔPL,2for area 2

图8 2个区域频率偏差和ACE响应曲线Fig.8 Frequency difference and ACE response curves of two areas
从图8可看出,传统PID控制器对扰动有一定的抑制能力,但是同时考虑对系统响应的控制和对系统扰动的消除,这在一定程度上限制了扰动抑制能力,产生了较大的稳态误差,有许多时刻频率偏差超过互联电网对频率的要求(±0.01 p.u.)。两区域的频率偏差都在±0.08 p.u.范围内。其中,第1个区域频率偏差的均方差为0.0214 p.u.,第2个区域频率偏差的均方差为0.0199 p.u.。采用文献[16]方法两区域的频率偏差都在±0.04 p.u.范围内。其中,第1个区域频率偏差的均方差为0.0103 p.u.,第2个区域频率偏差的均方差为0.0081 p.u.。云神经网络自适应逆控制器将系统响应的控制和对系统扰动的消除分开考虑,扰动消除能力强,使互联电力系统频率偏差和控制偏差都保持在较小的范围内。从图中可看出,两区域的频率偏差都在±0.01 p.u.范围内,满足互联电网对频率的要求。其中,第1个区域频率偏差的均方差为0.0034 p.u.,第2个区域频率偏差的均方差为0.0038 p.u.。可见,采用云神经网络控制器的控制效果明显优于采用PID控制器的控制效果。
为验证云神经网络自适应逆控制器的自适应能力,考虑系统参数变化时的情况。第1个区域的电力系统参数变为:Tg1=0.5 s,Tt1=0.6 s,R1=0.033,B1=22.2,D1=0.6,M1=4。第2个区域电力系统的参数变为:Tg2=0.4 s,Tt2=0.6 s,R2=0.025,B2=24.8,D2=0.9,M2=7。两区域频率偏差和ACE响应如图9所示。

从图9可看出,传统PID控制器对系统参数变化缺乏自适应性。当系统参数发生变化,会产生较大的稳态误差。两区域的频率偏差都在±0.1 p.u.范围内。其中,第1个区域频率偏差的均方差为0.0306 p.u.,第2个区域频率偏差的均方差为0.0307 p.u.。采用文献[16]方法两区域的频率偏差都在±0.05 p.u.范围内。其中,第1个区域频率偏差的均方差为0.0181 p.u.,第2个区域频率偏差的均方差为0.0198 p.u.。采用云神经网络自适应逆控制器,两区域的频率偏差仍保持在±0.01 p.u.范围内,满足互联电网对频率的要求。其中,第1个区域频率偏差的均方差为0.0052 p.u.,第2个区域频率偏差的均方差为0.0064 p.u.。云神经网络自适应逆控制器能够很好地适应系统的参数变化,且对外部扰动具有很强的鲁棒性,使互联电力系统频率偏差和控制偏差仍保持在较小的范围内。

图9 参数变化时2个区域的频率偏差和ACE响应Fig.9 Frequency difference and ACE response curves of two areas when parameters change
7 结论
针对含风电的互联电力系统负荷频率控制问题,设计基于云神经网络的自适应逆控制器,使系统响应和扰动消除同时达到最优。该控制器不仅对系统参数的变化具有自适应能力,而且对外部扰动具有很强的鲁棒性,仿真验证了其优于传统的PID控制器,其缺点是实现略微复杂。
参考文献:
[1]张谦,李晨,周林,等.计及电动汽车实时可控能量动态变化的负荷频率控制[J]. 电力自动化设备,2017,37(8):234-241.ZHANG Qian,LI Chen,ZHOU Lin,et al.Load frequency control considering dynamic change of real time controllable EV energy[J].Electric Power Automation Equipment,2017,37(8):234-241.
[2]ABDEL-HALIM M A,CHRISTENSEN G S,KELLY D H.Decentralized optimum load frequency control of interconnected power systems[J].Journal of Optimization Theory&Applications,1985,45(45):517-531.
[3]杨德友,蔡国伟.含规模化风电场/群的互联电网负荷频率广域分散预测控制[J]. 中国电机工程学报,2015,35(3):583-591.YANG Deyou,CAI Guowei.Decentralized model predictive control based load frequency control for high wind power penetrated power systems[J].Proceedings of the CSEE,2015,35(3):583-591.
[4]李挺,雷霞,张学虹,等.基于NARX神经网络预测及模糊控制的互联电网CPS鲁棒控制策略研究[J].电力系统保护与控制,2012,40(14):58-62.LI Ting,LEI Xia,ZHANG Xuehong,et al.CPS robust control strategy research based on NARX neural network pre-sentient algorithms and fuzzy logic controller[J].Power System Protection and Control,2012,40(14):58-62.
[5]NAG S,PHILIP N.Application of neural networks to automatic load frequency control[C]∥International Conference on Control,Instrumentation,Energy and Communication.Calcutta,India:IEEE,2014:431-441.
[6]WEI W,OHMORI H.Decentralized load frequency control for two-area interconnected power system[J].Control Theory&Technology,2015,13(2):101-114.
[7]OYSAL Y,YILMAZ A S,KOKLUKAYA E.Adaptive load frequency control with dynamic fuzzy networks in power systems[J].Lecture Notes in Computer Science,2005,3512:1108-1115.
[8]QIAN D,TONG S,LIU H,et al.Load frequency control by neuralnetwork-based integral sliding mode for nonlinear power systems with wind turbines[J].Neurocomputing,2016,173:875-885.
[9]WU Z Q,JIA W J,ZHAO L R,et al.Maximum wind power tracking based on cloud RBF neural network[J].Renewable Energy,2016,86:466-472.
[10]吴忠强,赵立儒,贾文静,等.计及DG与STATCOM的配电网重构优化策略[J]. 电力自动化设备,2016,36(1):111-116.WU Zhongqiang,ZHAO Liru,JIA Wenjing,et al. Optimal reconfiguration of distribution network with DG and STATCOM[J].Electric Power Automation Equipment,2016,36 (1):111-116.
[11]米晓萍,李雪梅.基于正态云神经网络的齿轮泵的故障诊断研究[J]. 计算机科学,2013,40(8):266-267.MI Xiaoping,LI Xuemei.Study on fault diagnosis of fear pump based on normal cloud neutral network[J].Computer Science,2013,40(8):266-267.
[12]徐岩,陈昕.基于合作博弈和云模型的变压器状态评估方法[J].电力自动化设备,2015,35(3):88-93.XU Yan,CHEN Xin.Transformer status assessment based on cooperative game and cloud model[J].Electric Power Automation Equipment,2015,35(3):88-93.
[13]JIA C Y,BAI T,SHAN X Y,et al.Cloud neural fuzzy PID hybrid integrated algorithm of flatness control[J].Journal of Iron&Steel Research International,2014,21(6):559-564.
[14]王姣,祁美玲.RBF云神经网络在数控机床刀具磨损状态识别中的应用[J]. 机床与液压,2011,39(15):146-149.WANG Jiao,QIMeiling.Application of RBF cloud-neural network in identification of CNC machine tool wear[J].Machine Tool&Hydraulics,2011,39(15):146-149.
[15]蔡国伟,张斌,王建元,等.云模型理论在互联电力系统负荷频率控制中的应用[J]. 中国电机工程学报,2015,35(2):353-358.CAI Guowei,ZHANG Bin,WANG Jianyuan,et al.Application of cloud model theory to the load frequency control in interconnected power systems[J].Proceedings of the CSEE,2015,35(2):353-358.
[16]项雷军,王涛云,郭新华.多区域互联电网的分散式模糊PID负荷频率控制[J]. 华侨大学学报(自然版),2014,35(2):121-126.XIANG Leijun,WANG Taoyun,GUO Xinhua.Decentralized fuzzy-PID based load frequency control of multi-area interconnected power grids[J].Journal of Huaqiao University(Natural Science),2014,35(2):121-126.
