双离合器自动变速箱半结合点标定方法研究
2017-05-22罗贤虎涂安全
罗贤虎,涂安全
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
引言
根据离合器结合过程的特征,离合器克服整车阻力矩、车辆由静止到运动的瞬间是对离合器控制的一个关键点,对应的离合器位置称之为离合器半结合点kiss point,后面简称KP[1];根据离合器结合过程,结合离合器的力学特征及制造工艺方面的因素,离合器的结合过程通常分为四个阶段,如图1所示:空行程阶段(0~t1)、空滑阶段(t1~t2)、滑摩阶段(t2~t3)和同步运行阶段(t3~t4)[2-5]。

图1 离合器结合过程示意图
在对电-液控制的湿式双离合自动变速箱的离合器进行控制的过程中,当DCT的电子控制单元TCU根据驾驶员的操作判断需要结合某个离合器时,为了能够以更快的速度响应驾驶需求,通常首先需要向离合器油腔中进行快速充油[6-7],如图 2所示:预充油(T1~T2)、充油(T2~T3)、达到KP(T3)以消除离合器空行程;当离合器达到KP位置,并能够保持稳定时,再根据驾驶工况,进行离合器的后续控制。

图2 离合器充油过程示意图
在实际工程项目的离合器控制策略中,对离合器KP准确标定很重要,有以下两方面现实意义:首先可以缩短由驾驶意图改变到车辆有效反馈的反应时间;其次可以减小离合器结合过程中产生的滑摩损失。
实际上离合器KP在不同变速箱温度环境、不同驾驶工况下均存在一定的差异;同一型号的不同离合器之间本身也存在一定散差,同时同一型号的同一个离合器在使用过程中会出现磨损,其半结合点在使用一段时间后会发生变化。本文重点针对如何准确的对离合器KP标定以及对标定结果的验证进行分析研究;针对散差和磨损等导致的差异,已经有学者进行过离合器半结合点自学习方面的研究,本文不再赘述。
1 KP标定原理和内容
1.1 离合器KP标定的基本原理
部分专家学者建议[8]通过发动机转速或变速箱输入轴转速判断离合器 KP,具体方法为在车辆静止、发动机处于稳定怠速时,以缓慢的速度结合离合器,当发动机转速明显下降时,或者输入轴转速与发动机转速快速同步时对应的离合器位置,减去较小的偏差值即为离合器对应 KP;但是实际上采用该原理进行标定时,容易受转速传感器精度与延迟、发动机怠速转速稳定性以及变速箱拖曳扭矩等诸多因素的影响,标定KP与真实KP存在差异。

图3 KP标定基本原理
根据KP定义,当离合器的传递扭矩大于整车阻力矩,车速实现从零突破的点为离合器 KP,通过实际测试发现,当离合器位置达到KP时,即使发动机转速或者输入轴转速位出现明显波动,但由于离合器开始传递扭矩,负载增加,为维持稳定怠速转速,发动机输出扭矩必然出现明显波动;因此采用发动机输出扭矩作为判断离合器KP的依据,如图3所示,具体方法如下:车辆静止,档位为1档或R档(分别对应离合器1和离合器2),在从离合器完全打开开始(图3中A点),以一定的速度和台阶缓慢结合离合器,消除离合器空行程,记录发动机输出扭矩发生明显突变的点(图3中B点开始,发动机扭矩变化约5~10Nm,至C点),C点位置即为对应离合器的KP。
1.2 离合器KP标定的主要内容
针对离合器KP的标定主要包括四大部分,分别是基于变速箱油温的离合器KP基础值标定、基于变速箱油温和不同驾驶模式[9-10]的KP补偿值标定、基于不同油门开度和驾驶模式的KP补偿值标定和制动停车时KP补偿值标定;在车辆实际运行过程中除基础值外,其它补偿值由控制系统根据不同输入条件进行逻辑判断,选择对应的补偿。

图4 离合器KP的组成部分
2 KP标定过程及方法
(1)KP标定前确认离合器压力-电流特性曲线(简称P-I曲线)符合要求,消除压力控制不准确导致KP偏差的因素:P-I特性曲线迟滞小于100kPa;稳定工作状态时期望压力与实际压力的差值小于10kPa。
(2)KP标定前完成刹车踏板开度特性曲线标定,确保标定刹车开度与驾驶员期望一致。
(3)确保车辆静止、换档杆在 P档位置、预挂档位为D1/R档,通过手动或脚本设定离合器压力从180kPa开始以20kPa/s的速率结合至320kPa后将压力减为0kPa,结合过程中同步记录发动机扭矩信号和离合器压力信号。
通过实测数据会发现所记录的发动机扭矩信号往往都存在“毛刺”,不利于识别KP位置点,因此为了方便数据分析,需要对发动机扭矩信号进行低通滤波处理,处理后的信号如图3所示,可以清楚的找到扭矩突变的点。
(4)重复上述步骤,完成不同变速箱油温状态下的KP测试,得到离合器的KP基础值,如图5所示。

图5 离合器KP的组成部分
(5)蠕动驾驶工况KP补偿值标定:在平直干燥路面、踩刹车挂 D1/R档、松开刹车、不踩油门在发动机怠速情况下控制离合器压力使车速达到稳定目标车速5±1km/h后,踩刹车使车速为0,此时按下EPB或者AuotoHold开关;在大量反复进行上述工况测试的过程中,分别使用不同的刹车和EPB等信号相关的KP补偿值,最终确定适合实际工程项目的参数,蠕动工况KP补偿参数参数的选取基本原则包括:
1)变速箱进入蠕动状态,离合器的结合过程中,发动机转速波动量小于75rpm;
2)车辆蠕动稳定车速明显大于5km/h,且车速出现明显周期波,一般为补偿值过大,需要进行重新标定;
3)踩刹车停车或者按下EPB等开关时,不能有使驾乘人员明显感受到的振动现象;
4)蠕动过程中对刹车进行踩-松-踩的反复操作,不能产生明显的离合器结合撞击声;
5)踩刹车或使用 EPB/AuotoHold功能过程中发动机燃油消耗不会明显上升。
基于以上原则,通常蠕动工况下的KP补偿值为负值;针对蠕动驾驶工况的KP补偿主要分为两大部分,即基于不同变速箱油温的针对蠕动驾驶模式的KP补偿标定(分踩刹车和不踩刹车另种具体情况,同时关注踩刹车和不踩刹车的过程切换)和基于变速箱油温的针对EPB/AuotoHold等功能作用时的KP补偿,如图6所示。

图6 蠕动KP补偿标定值
(6)起步驾驶工况KP补偿值标定:在平直干燥路面、踩刹车挂 D1/R档、松开刹车、稳定不同油门开度进行加速起步,当变速箱输入轴转速与发动机转速完全同步后,松开油门踩刹车至车速为 0。起步工况下 KP补偿参数的选择主要是:1)提高起步车速响应速度,一般要求800ms~3000ms内车速有反应;2)起步转速同步时间不能过长,一般要求在1850ms~3600ms内;3)进入起步状态时发动机转速不能明显下跌,一般要求小于100rpm。因此,针对起步工况的KP补偿由不同油门开度下的起步驾驶模式的KP补偿标定和基于变速箱油温的起步模式KP补偿标定组成,如图7所示。
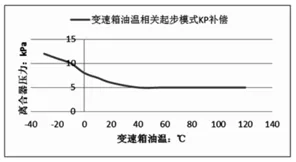
图7 起步模式温度相关KP补偿标定值

图8 起步模式油门开度相关KP补偿标定值
(7)换档驾驶工况KP补偿值标定:以恒油门升档为例,在平直干燥路面、踩刹车挂D1档、松开刹车、踩20%恒定油门,由静止开始加速升至D6档后,松油门滑行降档至D1,踩刹车停车。恒油门升档过程主要包括三个阶段:换档准备阶段、扭矩交替阶段和转速同步阶段。在扭矩交替阶段,结合轴扭矩逐步升高,分离轴扭矩逐渐降低,其综合在此过程中等于发动机扭矩,发动机转速因此基本保持不变。如果换档过程中KP偏大或者偏小,则在上升/下降斜率不变情况下,扭矩交替阶段总的离合器扭矩就会大于/小于发动机扭矩,因此就会出现图 9中红色/绿色虚线所示的发动机转速上漂或者转速抖动的情况,影响驾驶品质提升。换档工况KP补偿与起步工况类似,主要由不同油门开度下的换档驾驶模式的KP补偿标定和基于变速箱油温的换档模式 KP补偿标定组成。

图9 换档控制过程示意图
3 KP标定结果验证
按照上述标定内容和方法对某款搭载双离合器自动变速箱的SUV车型的进行KP补偿值标定,标定完成后对该车型的KP进行测试验证;
3.1 车辆静止时离合器KP验证
车辆静止时KP验证通过静态挂档时的发动机扭矩测试进行判断,如图10 所示。

图10 原地静态挂档发动机扭矩测试结果
从图10的测试数据中可以看出,进行原地挂档结合离合器时KP等于227kPa,发动机扭矩由空档时的0Nm变为5Nm左右,发动机怠速转速由750rpm略微降低到735rpm,该实验结果与离合器KP的定义基本吻合,且发动机转速稳定,未出现明显下跌或抖动。
3.2 蠕动工况离合器KP验证
从图11蠕动验证测试数据中可以看出,蠕动过程KP等于237kPa,发动机转速下降小于75rpm;蠕动最终车速稳定在 5±1km/h,且未出现周期波动现象;踩刹车停车时发动机转速回归怠速,离合器压力在KP点以下,离合器不对车轮传递扭矩,因此不会对燃油消耗造成影响;同时主观上不存在能明显感受到的振动。
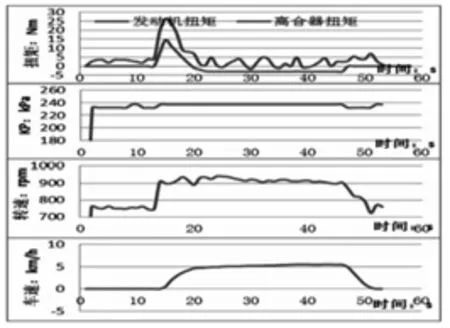
图11 蠕动工况验证测试结果
3.3 起步工况离合器KP验证
图 12为 55%油门起步工况测试,起步过程 KP等于251kPa,转速响应时间约700ms,车速响应时间约3000ms,最终同步转速约 2500rpm,起步初始阶段发动机转速下降幅度小于100rpm;主观不存在明显冲击和延迟。

图12 起步工况验证测试结果
3.4 换档工况离合器KP验证
图13 为恒定30%油门开度2档升3档的换档过程数据,换档过程KP等于247kPa,换档扭矩交替过程中发动机转速与输入轴转速基本保持一致,转速未出现明显上漂或者抖动现象;

图13 换档工况验证测试结果
4 结论
本文主要针对离合器KP在实际工程项目中的标定和验证方法进行了研究;通过大量实测数据分析不同变速箱油温、不同驾驶工况下的离合器KP对整车驾驶性的影响;最后结合具体车型的标定开发,详细验证了文中所述的KP标定内容和方法对于一般双离合自动变速箱KP控制的实用性。
参考文献
[1] 王小飞.离合器 PTP点自适应算法研究与应用[J].汽齿科技,2015(1):47-50.
[2] 李勇,常思勤,魏英俊.AMT选换挡机构自学习控制策略研究[J].汽车工程,2010(10):878-882.
[3] 黄建明.机械式自动变速器的控制策略研究[D].重庆:重庆大学,2004.
[4] 叶明.基于机械自动变速的轻度混合动力传动系统综合控制研究[D]. 重庆:重庆大学,2004.
[5] 阴晓峰,葛安林,雷雨龙,牛铭奎. 基于神经网络的 AMT离合器自适应温度补偿控制[J]. 农业机械学报, 2001, 32(3):11-14.
[6] 安徽江淮汽车集团股份有限公司.双离合器自动变速箱离合器充油控制方法:中国, 201310379763.7[P] .2013.
[7] 安徽江淮汽车集团股份有限公司.一种湿式双离合器充油控制方法及系统:中国, 201610964205.0[P] .2016.
[8] 钟再敏,王治松.汽车起步离合器半结合点自学习方法研究[J].机电一体化,2013(8):19-24.
[9] Harald Naunheimer, Bernd Bertsche, Joachim Roborz, Wolfgang Novak. Automotive Transmission Fundamentals, Selection, Design and Application [M].Second Edition. New York:Springer, 2010.73-98.
[10] Robert Fischer, Ferit Kucukay, Gunter Jurgens, Rolf Najork,Burkhard Pollak. The Automotive Transmission Book[M].Second Edition. New York: Springer, 2014.99-162.