基于模糊PID控制的液压启闭机同步控制仿真
2017-05-18史龙龙杨丽红朱小明
史龙龙,杨丽红,朱小明
(1.上海理工大学 机械工程学院,上海 200093;2.上海豪高科技机电有限公司,上海 20093)
基于模糊PID控制的液压启闭机同步控制仿真
史龙龙1,杨丽红1,朱小明2
(1.上海理工大学 机械工程学院,上海 200093;2.上海豪高科技机电有限公司,上海 20093)
某公司设计的液压启闭机运行过程中,闸门启闭过程采用双吊点液压启闭机控制时,两液压缸位移的同步偏差过大,闸门发生倾斜,加剧闸门两侧水封的磨损,导致水封密封性能下降。为保证启闭机两液压缸同步精度,文中设计了一种基于模糊PID控制理论的控制器。将设计的模糊PID控制器与常规PID控制器在相同的电液比例位置同步模型下进行了比较, Matlab/Simulink仿真实验结果表明了采用模糊PID控制的优越性。
液压启闭机;同步精度;模糊PID控制;Matlab/Simulink
在液压启闭机推动重载闸门执行机构的运动过程中,其作用显著。在大负载和大挠度载荷的情况下,由于泄漏、负载变化和死区时间的变化,难以实现高精度的同步,研究人员在此进行了大量的研究[1]。但是,由于液压系统的泄漏、非线性摩擦、控制元件的性能、负载和系统的制造误差等问题,液压同步的精度一直没有得到很好地解决[2]。当前国内液压启闭机的需求量随着水利水电的发展建设不断增加。因此,找到适合液压启闭机同步控制的方法尤为重要。
1 液压启闭机控制系统及建模
根据液压传动控制理论知识,结合本课题液压执行系统的工作过程和要求,确定控制系统工作的主要过程是:首先指令信号和反馈信号形成偏差信号,再经过控制器 生成动态的控制信号,控制信号去控制信号放大器从而控制电液比例阀,电液比例阀控制通过液压缸开闭门过程中流量大小从而控制活塞杆运动速度的快慢,最终能够忽略载荷的影响达到位置同步的目的[3-4]。
整个液压启闭机的控制系统主要包括以下几个部分:多功能数据采集卡、位移传感器、 电液比例阀、比例放大电路板以及外设开关、显示屏等人工监控设备。根据上述工作过程设计出液压控制系统,如图1为液压闭环控制系统方图。

图1 液压闭环控制系统方图
由图1的原理可得,电液比例阀控液压缸系统的模型为
(1)
开环传递函数为
(2)

2 模糊PID控制器设计
2.1 模糊PID控制原理
模糊PID控制方法是一种新型智能控制算法,其特点是基于模糊控制算法与传统的PID控制算法相结合,最常见的一种模糊PID控制算法是Fuzzy-PID双模控制形式,模糊控制器对非线性的系统控制具有良好的动态特性是其主要的系统特性,但却不能完全消除静态偏差[5]。传统的PID控制方式中积分环节的动态响应效果差,但是积分环节又能够很好的消除静态偏差[6-7]。本文更倾向于把模糊控制和常规PID控制这两种控制方法结合起来,以增加稳态控制性能,于是形成了模糊PID控制[8]的新方法。如图2为模糊控制器结构图。
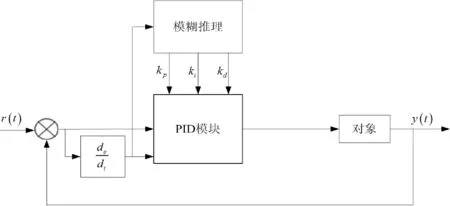
图2 模糊控制器结构
2.2 论域与模糊集的确定
一般控制器设计由输入量的模糊化、模糊子集和隶属函数的确定、模糊控制器的规则的设计以及模糊推理、输出量的解模糊等部分组成[9-10]。
偏差e的模糊集合论域设为X={-n,-n+1,…,n-1,n},偏差变化率ec的模糊集合论域为Y={-m,-m+1,…,m-1,m}。e和ec从基本论域[-e,e]、[-ec,ec]到模糊论域X、Y转化是通过量化因子和实现的,Ke和Kec的定义为:ke=n/e,kec=m/ec。式中,m和n为模糊论域中的最大值,e和ec为基本论域最大值。通过将基本论域中的精确值与量化因子相乘就能得到模糊论域中的某一元素[11-12]。
据电液比例位置控制系统设定值的要求,定义偏差e、偏差率ec、比例系数变化量ΔKP、积分变化系数ΔKI、微分系数变化量ΔKD的模糊论域均设为[-3,3],并且设模糊子集为{NB,NM,NS,ZO,PS,PM,PB},子集里面的元素代表:负大、负中、负小、零、正小、正中、正大[13-14]。本文把偏差e的基本论域假设为[-6,6] mm,当两支液压缸位移偏差> 6 mm 时,系统就发生报警信号,故障灯闪烁,比例阀的电磁铁断电,同时阀口关闭。假设偏差变化率ec的基本论域为[-0.6,0.6] mm,那么量化因子分别为:ke=3/6=0.5,kec=3/0.6=5 。
比例系数变化量ΔKP、积分变化系数ΔKI、微分系数变化量ΔKD的基本域分别定义为[-3,3]、[-0.06,0.06]、[-0.3,0.3],则分别计算出ΔKP的比例因子为1、ΔKI的比例因子为1/50、ΔKD的比例因子为1/10。
2.3 建立模糊规则表
根据使用经验可以总结出,偏差e和偏差率ec的取值变化源于PID控制器的参数Δkp,Δki,Δkd的变化有不同:设计参数Δkp,Δki,Δkd控制规则表[15]。依照控制规则表,选择输入输出模糊变量的论域范围、各语言变量的隶属函数形状等参数,解模糊方法选用默认的重心法[16],模糊推理系统中变量的定义和各变量隶属函数的设置完成后,按模糊规则表在规则编辑器中输人控制规则。
2.4 模糊PID控制仿真
在Simulink 建模时一个液压缸模型采用开环控制,另一个液压缸中则加入了 PID 控制器较正环节,液压启闭机两吊点的阀控液压缸子系统的仿真模块如图 5所示,而根据逐步经验试凑的方法,就可以求得其中阀控液压缸系统加入PID控制的增益参数为:KP=5.5,KI=0.1,KD=0.29。在Simulink模型中加入了模糊PID 控制器较正环节之后的液压启闭系统的仿真模块。仿真后得到启闭机的控制系统单位阶跃响应曲线,其响应曲线如图 3所示。
由图可以看出,在启闭机控制系统未加入PID 较正环节时,阶跃响应超调较大,误差已经超过5%,在稳态值上下进行宽幅振荡。而在加入了位移反馈和 PID 校正环节后,超调量显著减小,调整震荡时间也大幅降低,因此在同步控制系统中加入 PID 校正环节能够优化系统的特性。与PID 校正环节仿真设置相同,采用模糊自适应 PID 控制算法的阀控液压缸系统的采样周期为Ts=25 ms。

图3 液压缸分别在模糊PID与普通PID控制时单位阶响应曲线
通过与 PID 控制相比较可以看出,模糊 PID 控制仿真效果较好,系统的响应特性虽然比PID控制略慢一些,总体振荡较小,超调量也不大,并且误差基本能够保持在 2%以内,足以证明模糊 PID 控制是一种能够提供更好的精度和稳定性以及性能优异的同步控制算法。
3 结束语
本文阐述了液压启闭机闭环控制系统,设计了一种基于模糊PID控制理论的控制器,保证了启闭机两液压缸同步精度。将设计的模糊PID控制器与常规PID控制器在相同的电液比例位置同步模型下进行了比较,随后在AMESim软件中建立了液压启闭机双液压缸控制的液压系统模型,联合Simulink对PID算法和模糊PID算法分别进行了仿真,仿真结果表明采用模糊PID算法更能保证闸门开闭过程中的位移误差水平,同步精度更好。
[1] 陈文伟,卞建,孙美玲,等.苏州河河口水闸液压启闭机设计与同步控制[J].水利水电科技进展, 2007, 27(1):8-10.
[2] 马晓明,于泓淼.谈水工闸门启闭机型式的选择[J].吉林水利,2010(7):18-21.
[3] Chen H. Research of the electro-hydraulic servo system based on RBF fuzzy neural network controller[J]. Journal of Software,2012,7(9):874-889.
[4] 田凡.电液伺服系统模糊PID控制仿真与试验研究[D].太原:太原理工大学,2010.
[5] 刘国志,张富贵,陈宇熠,等.基于模糊PID控制的PWM型电磁比例阀的研究[J].贵州科学,2012,30(5):45-48.
[6] 王三武,董金发.基于Matlab模糊自整定PID控制器的设计与仿真[J].机电工程技术,2006,35(2):67-70.
[7] 龙利.Matlab环境下控制系统实时仿真实验的研究[D].重庆:重庆大学,2005.
[8] 宋俊,于玲.阀控缸建模方法的数字仿真比较[J].机床与液压,2004(3):122-123.
[9] 李延峰,杨冠鲁,吕念芝,等.逆变电源模糊比例积分微分控制器[J].探测与控制学报, 2009,31(3):35-38.
[10] 刘奇峰,祁晓野,纪友哲,等.模糊PID控制在非连续液压伺服系统中的应用[C].杭州:中国航空学会飞行器控制与操纵第十二次学术交流会暨陀螺与惯导第三次学术交流会,2007.
[11] Kyoung Kwan A H N,Dinh Quang Trong,Yoon Hong Soo.Self turning fuzzy PID control for hydraulic load simulator[C].Seoul,Korea:International Conference on Control Automation and Systems,2007.
[12] 李延峰,杨冠鲁,吕念芝,等.逆变电源模糊比例积分微分控制器[J].探测与控制学报, 2009,31(3):35-38.
[13] 李敏捷.基于PID算法的电液比例同步控制系统的研究及应用[D].重庆:重庆大学, 2014.
[14] 王传礼,吴晓磊,周禾清,等.超磁致伸缩直动式高频电液伺服阀的建模与动态仿真研究[J]. 机床与液压,2013(19):15-17.
[15] 游张平,王卫锋.基于Simulink的液压伺服系统动态仿真[J].机床与液压,2004(6):47-49.
[16] 李银伢.满意PID控制器设计理论[D].南京:南京理工大学,2006.
Simulation of Synchronous Control of Hydraulic Hoist Based on Fuzzy PID Control
SHI Longlong1,YANG Lihong1,ZHU Xiaoming2
(1.School of mechanical engineering, University of Shanghai for Science and Technology, Shanghai 200093, China;2. Haogao Mechatronics Technology Co. Ltd., Shanghai 200093, China)
In the operation process of hydraulic hoist designed by a company in Jiaxing, with the process of gate opening and closing controlled by the double hanging point hydraulic hoist, once the displacement synchronous deviation of two hydraulic cylinder is too large, the gate will be in an inclination status, then both sides of the gate seal will be aggravating wear, resulting in water seal performance degradation. According to the characteristics of bogie separation device, a fuzzy PID control system is designed. The fuzzy PID controller is compared with the normal PID controller. Matlab/Simulink simulation shows that the fuzzy PID control is better than the traditional PID control in control accuracy without overshoot.
hydraulic hoist; synchronous precision; fuzzy PID controller; Matlab/Simulink
2016- 05- 31
史龙龙(1992-),男,硕士研究生。研究方向:流体传动与控制。杨丽红(1973-),女,博士,副教授。研究方向:先进制造技术与结构设计。朱小明(1975-),男,高级工程师。研究方向:流体传动与控制。
10.16180/j.cnki.issn1007-7820.2017.05.038
TP273
A
1007-7820(2017)05-139-03