基于异源信号特征融合的刀具磨损状态识别
2017-05-18潘贺丰朱坚民
潘贺丰,朱坚民
(上海理工大学 机械工程学院,上海 200093)
基于异源信号特征融合的刀具磨损状态识别
潘贺丰,朱坚民
(上海理工大学 机械工程学院,上海 200093)
针对单一刀具切削信号的局限性和磨损特征存在较强的非线性,提出一种基于异源信号特征融合的刀具磨损状态识别方法。同时采集加工过程中的振动信号和声发射信号,分别提取它们小波包频带的相关时域特征,采用局部保留投影算法对原始特征进行降维,并将两信号的低维特征进行融合,对融合特征通过灰色接近关联模型进行磨损状态识别。通过3把车刀的切削磨损实验,结果表明该方法可充分利用异源信号的互补信息和特征数据之间的非线性关系,更全面地表征刀具磨损状态,相比单信号法具有更高的识别精度。
异源信号;局部保留投影;特征融合;刀具磨损;灰色接近关联模型
刀具作为金属切削过程的直接执行者,其状态的变化直接导致产品质量下降和生产成本增加,所以刀具状态的监测对提高产品质量,降低生产成本具有重要意义。传统方法大多基于单一信号[1-4],然而,单一信号的信息量有限,限制了监测准确性的提高。基于多种信号同时监测的传感器融合技术[5-7]具有信息覆盖范围广,抗干扰能力强等优势。振动信号对刀具磨损具有较高的敏感度[8],声发射信号频率高[9],避开了加工过程中振动和环境噪声污染严重的低频区。因此,本文将振动信号与声发射信号同时用于车刀磨损状态的识别。由于切削信号具有较强的非线性和非平稳性,提取的原始高维特征中不可避免的存在冗余信息,所以需要对原始高维特征进行简化,提取能够反映刀具磨损的低维特征。在刀具磨损状态的识别方法方面,神经网络方法[10]需要大量的训练样本,支持向量机算法[2]的核函数、损失函数以及惩罚参数选择的随机性影响识别性能。因此,需要寻找一种适用于样本量少且算法简单的方法。
综合以上分析,本文提出了一种基于异源信号特征融合的车刀磨损状态识别方法。首先对振动信号和声发射信号进行小波包特征提取,然后用局部保持投影(LPP)方法对原始特征进行降维,并将两类信号的低维特征进行融合,最后用灰色接近关联分析融合特征,进行刀具磨损状态的识别。通过三把车刀的切削实验,结果表明该方法能够有效用于车刀磨损状态的识别。
1 基本原理
本文基于振动(Vibration, VIB)和声发射(Acoustic Emission, AE)这两个异源信号的分析进行车刀磨损状态的识别。安装在车刀刀柄上的振动传感器和声发射传感器在切削加工过程中实时采集振动信号和声发射信号,并依次经过信号放大、抗混叠滤波和A/D转换后存储在计算机中,供后续分析。车刀磨损状态识别原理如图1所示。

图1 车刀磨损状态识别流程图

(2)获取低维特征。采用局部保持投影(Locality Preserving Projection , LPP)方法对原始高维特征矩阵进行降维,去除冗余信息,得到低维特征矩阵YVIB和XAE;
(3)获取融合特征。将低维特征YVIB和XAE进行串行组合,得到融合特征矩阵TLPP;
(4)状态识别。对融合特征进行灰色接近关联分析,用关联度的大小反映车刀的磨损状态。
1.1 基于小波包变换的特征提取

原始高维非线性特征中存在冗余信息,有必要剔除冗余信息以提高识别的准确性。LPP算法[11-13]通过非线性降维提取高维数据的内在特征,适用于处理高维、复杂非线性的刀具磨损特征。
设样本X=(x1,x2,…,xn)T为原始高维特征矩阵,维数为n×p,Y=(y1,y2,…,yn)T为降维后的低维特征矩阵,维数为n×d。
(1)计算近邻点。计算每个点xl(l,m=1,2,…,n)与其余样本点之间的欧氏距离,找出其最近k个点,构造一个近邻图。距离公式为
d(xl,xm)=‖xl-xm‖
(1)
(2)构造矩阵W
(2)
(3)计算特征矢量
XLXTa=λXDXTa
(3)
式中,Dll=∑mWlm,L=D-W;
(4)计算式(3),得到特征值λ1<…<λd对应的特征矢量a=a1,…,ad。因此,低维空间样本:yl=ATxl,其中A=(a1,…,ad)。则振动信号和声发射信号的低维特征矩阵分别为
(4)
(5)
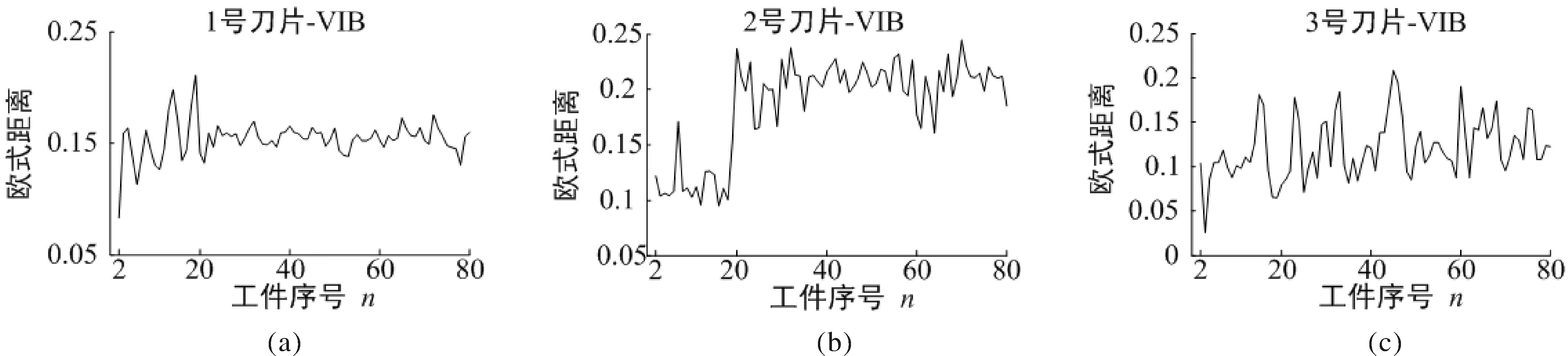
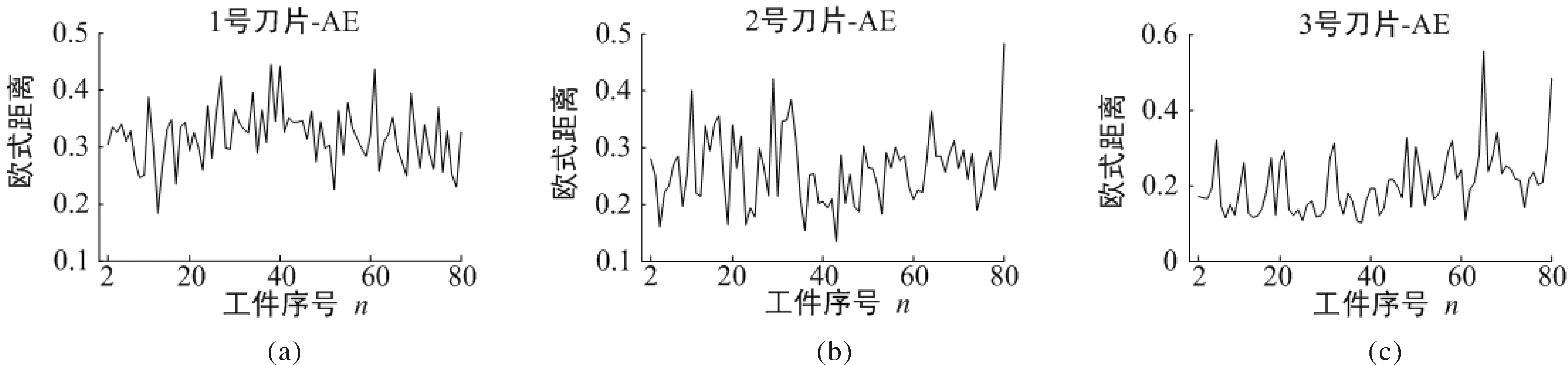
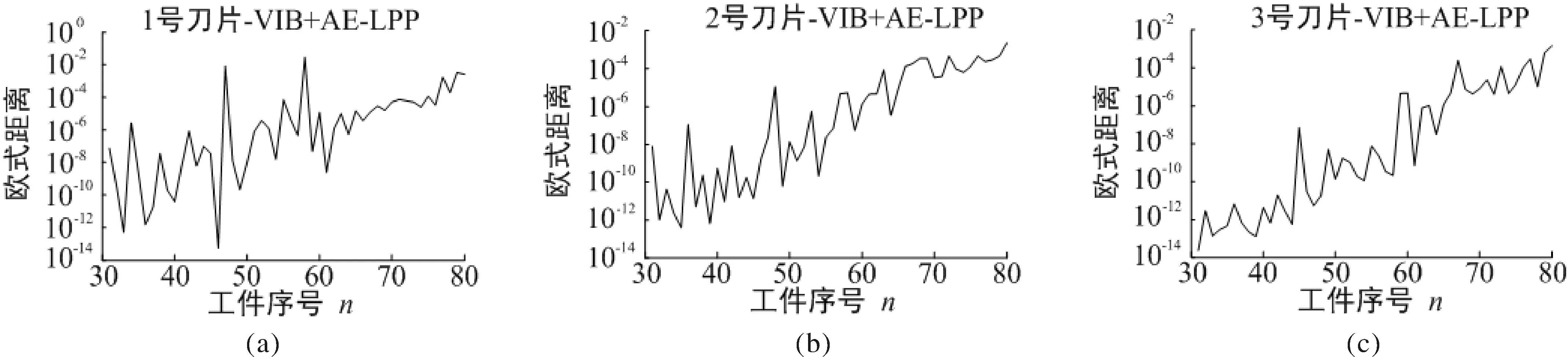
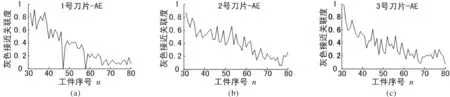
YVIB和YAE维数分别为n×d1和n×d2,(d1,d2 1.3 异源信号特征的融合 为使反映车刀磨损状态的信息更加完整,本文将上述两类信号的低维特征矩阵进行串行组合,得到融合特征矩阵 (6) 1.4 车刀磨损状态的灰色识别 接近性灰色关联模型[14]是基于距离概念构造的,对样本量没有太多要求,算法简单。然而,目前传统的灰色接近关联模型存在一些不足,因此,本文引入了一种改进的灰色接近关联模型[15]来对刀具磨损状态特征进行分析。 2.1 实验设计 实验中使用型号为ZCK20的数控车床进行车削实验,车刀刀片型号为WNMG080408-TM T9125。采用丹麦Brüel & Kjr公司的4525B型三向加速度传感器和PXIe-1075数据采集系统,搭载PXIe-4498板卡采集振动信号,采样率为200 kHz。采用Kistler 8152B型声发射传感器,同样使用NI公司的PXIe-1075数据采集系统,搭载PXIe-6368板卡采集声发射信号,采样率为2 000 kHz。 2.2 实验结果分析 2.2.1 异源信号分析与特征提取 本文选取了sym3小波对振动信号和声发射信号进行分析。为说明原始特征对不同磨损状态的区分能力,以第1个工件为参考,本文计算了第2~第80个工件与第1个工件对应的原始特征向量之间的欧式距离,结果如图2和图3所示。 图2 振动信号原始特征向量之间的欧氏距离 图3 声发射信号原始特征向量之间的欧氏距离 由图2和图3可知,单个信号原始特征向量之间的欧式距离随着刀具磨损的增加没有呈现出单调趋势,无法区分不同的磨损状态。因此,如果将原始特征用于最终识别,则无法得到准确的识别结果。对上述原始特征进行LPP降维并融合,3把刀片对应的嵌入维数d都为20。鉴于LPP降维方法需要一定的样本数,本文计算了第31~第80个工件与第1个工件对应的融合特征向量之间的欧式距离,如图4所示。 图4 融合特征向量之间的欧氏距离 由图4可知,随着加工工件数的增加,降维后的融合特征向量之间的欧式距离也不断增加,呈单调上升趋势,区分度较降维前有了显著提高,说明降维后的特征比原始特征有了更强的磨损相关性,因此对于磨损状态的识别准确度更高。 2.2.2 刀具磨损状态灰色识别 图5和图6为对单一振动信号和声发射信号的低维特征进行灰色接近关联分析的结果,图7为对振动信号和声发射信号的融合特征进行灰色接近关联分析的结果。 图5 振动信号低维特征的灰色接近关联曲线 图6 声发射信号低维特征的灰色接近关联曲线 图7 融合特征的灰色接近关联曲线 由图5~图7可知:(1)单个信号的灰关联曲线振荡较大,单调性较差,既存在较大的突变,又存在随着加工工件增加关联度基本不变的情况,无法真实反映刀具磨损的渐近性;(2)异源信号融合特征的灰关联曲线不存在较大的尖峰,比单个信号的灰关联曲线更加光滑平稳,单调性更好;(3)在加工初期,融合特征的灰关联度接近1,随着刀具磨损逐渐加大,灰关联度逐渐减小,当刀具严重磨损致失效时,灰关联度在0.1附近。本实验采用加工工件数来间接表征刀具磨损状态,融合特征的灰关联曲线与刀具磨损状态的变化有明显的对应关系,当灰关联度超过0.12时,就判断刀具失效,没超过则继续使用。 (1)针对非线性、非平稳的车削信号,采用局部保持投影(LPP)对原始高维特征矩阵进行降维,得到了能够很好反映刀具磨损状态的低维特征,是一种有效的非线性降维方法;(2)改进的灰色接近关联方法弥补了传统灰色接近关联方法的不足,能如实地反映出数据序列的相似程度;(3)将振动信号和声发射信号相结合,获得了更多反映刀具磨损状态的信息,有效降低了识别的不确定性,提高了识别的准确性和可靠性。 [1] 张栋梁,莫蓉,孙惠斌,等.基于流形学习与隐马尔可夫模型的刀具磨损状况识别[J].西北工业大学学报,2015,33(4):651-657. [2] 关山,闫丽红,彭昶.LS-SVM回归算法在刀具磨损量预测中的应用[J].中国机械工程,2015,26(2):217-222. [3] 陈保家,陈雪峰,李兵,等. Logistic回归模型在机床刀具可靠性评估中的应用[J].机械工程学报,2011,47(18):158-164. [4] Shao H,Wang H L,Zhao X M.A cutting power model for tool wear monitoring in milling[J].International Journal of Machine Tools and Manufacture,2004,44(14):1503-1509. [5] 周友行,张俏,田茂,等.批量钻削监测信号双谱特征融合研究及应用[J].机械工程学报,2014,50(24):24-30. [6] Ibrahim D,Khaled A,Firas H.On modeling of tool wear using sensor fusion and polynomial classifiers[J].Mechanical Systems and Signal Processing,2009,23(5):1719-1729. [7] 李学军,李平,蒋玲莉,等.基于异类信息特征融合的异步电机故障诊断[J].仪器仪表学报,2013,34(1):227-233. [8] 李威霖.车铣刀具磨损状态监测及预测关键技术研究[D].西安:西安交通大学,2013. [9] Quadro Alexandre L,Branco J R T.Analysis of the acoustic emission during drilling test[J].Surface and Coating Technology,1997(94 -95):691 -695. [10] 李晓晖,傅攀.特征降维与决策融合在刀具磨损监测中的应用[J].机械设计与研究,2013,29(5):53-58. [11] 张晓涛,唐力伟,王平,等.基于多尺度正交PCA-LPP流形学习算法的故障特征增强方法[J].振动与冲击,2015,34(13):66-71. [12] 张绍辉,李巍华.基于特征空间降噪的局部保持投影算法及其在轴承故障分类中的应用[J].机械工程学报,2014,50(3):92-99. [13] 杨望灿,张培林,张云强.基于邻域自适应局部保持投影的轴承故障诊断模型[J].振动与冲击,2014,33(1):39-44. [14] 刘思峰,谢乃明,Forrest Jeffery.基于相似性和接近性视角的新型灰色关联分析模型[J].系统工程理论与实践,2010,30(5):882-887. [15] 刘震,党耀国,周伟杰,等.新型灰色接近关联度模型及其拓展[J].控制与决策,2014,29(6):1071-1075. Tool Wear State Recognition Based on Heterogeneous Signals Features Fusion PAN Hefeng, ZHU Jianmin (School of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China) A tool wear state recognition method based on heterogeneous signals features fusion is proposed to address the limitation of single tool turning signal and strong nonlinear relation of wear features. The vibration signal and acoustic emission signal are acquired simultaneously during the processing, and the wavelet packet frequency band relevant time-domain features are extracted respectively. Local preserving projection algorithm (LPP) is used to reduce the original features dimension. The low dimension features of the two signals are fused and sent to the grey nearness incidence model for wear state recognition. Experiment of the three turning tools show that the proposed method can make full use of complementary information from different signals and nonlinear relation among features data, and characterize tool wear state more comprehensively. The proposed method can obtain higher recognition accuracy than single signal method. heterogeneous signals; local preserving projection; features fusion; tool wear; grey nearness incidence model 2016- 11- 14 国家自然科学基金(50975179);上海市教委科研创新基金(11ZZ136);上海市科委科研计划基金(13160502500);沪江基金(D14005) 潘贺丰(1991-),男,硕士研究生。研究方向:精密测量。朱坚民(1968-),男,博士,教授。研究方向:机电系统的智能测控。 10.16180/j.cnki.issn1007-7820.2017.05.029 TN911.7;TB93 A 1007-7820(2017)05-105-05
2 实验研究


3 结束语