基于四轴飞行器的远程视频图像传输技术研究*
2017-05-16刘富起冀保峰李万坤孙炎增徐素莉
刘富起,冀保峰,李万坤,沈 森,孙炎增,徐素莉
(1.河南科技大学 信息工程学院,河南 洛阳 471023;2.中国南车集团股份有限公司,河南 洛阳 471000)
基于四轴飞行器的远程视频图像传输技术研究*
刘富起1,冀保峰1,李万坤2,沈 森1,孙炎增1,徐素莉1
(1.河南科技大学 信息工程学院,河南 洛阳 471023;2.中国南车集团股份有限公司,河南 洛阳 471000)
针对四轴飞行器可通过改变电机转速调整飞行姿态的特点,通过对四轴飞行器的姿态分析,设计了一个姿态检测调节系统,对四轴飞行器的远程视频图传技术进行研究和仿真分析,仿真研究了四轴飞行器的俯仰角和翻滚角,在此基础上,通过matlab等工具获得四轴飞行器的轨迹及姿态实时获取结果,并对四旋翼集群运动效果进行了仿真。结果表明所实现的四轴飞行器姿态检测调节系统有着稳定的性能,该方向研究有着广阔的应用前景。
四轴飞行器;图像处理;无线视频传输
与固定翼飞行器相比,旋翼型飞行器具有垂直起降的能力,且运动状态灵活。在国外,对四轴飞行器有多种叫法,如Quadcopter、X4-Flyer、Four-rotor等。
由于结构的对称性,四旋翼飞行器在操控性和机械机构方面具有很多潜在的优势。旋翼2、4沿着逆时针方向旋转,旋翼1、3沿着顺时针方向旋转,旋翼的扭矩会相互抵消,自动平衡[1]。而传统直升机都是采用加一个尾翼来平衡尾翼产生的扭矩,这个尾翼对向上无任何作用力,使能量没有得到最大限度利用。此外,由于四旋翼飞行器的旋翼更小,转速更高,使其具有更高的飞行效率;旋翼机同时可以减少旋翼碰撞周围建筑物的概率,使得飞行器在飞行中更加安全。在实际应用方面,四轴飞行器可以在复杂、危险的环境中执行特定的飞行任务,也可用于交通,环境的监测等。例如,将甲烷等有害气体的检测装置可安装在四旋翼飞行器上,在高空定点可以检测有害气体浓度。另外,四旋翼机还可进入辐射区进行核设施的检查,进行军事侦察,甚至搬运材料以及搭建房屋等。本文设计利用四轴飞行器搭载视频图传模块实现视频远程传输任务。
1 四轴飞行器姿态调整算法研究
近年来,由于航拍、监控、军事等领域的大量需要,四轴飞行器得到了较大的发展,可由于四轴飞行器具有非线性、不稳定以及运动不可测性等特点,其姿态信息的检测显得极为重要和棘手。通过对四轴飞行器的姿态分析,本文提出了一个可行方案,设计了一个姿态检测调节系统。
在四轴飞行器中,姿态角是极其重要的控制参数,姿态角直接关系到飞行器姿态的控制精度[2]。本系统采用STM32系列单片机作为主控芯片,MPU6050传感器用于姿态信息的初步检测,经过数据的分析、处理得到机体的姿态,通过上位机进行姿态显示,控制系统都是模块化处理,结构清晰明了。传感器与主控芯片之间的数据通信,采用硬件I2C总线的方式进行传输,使用互补滤波算法将从三轴角速度和三轴加速度传感器获得的数据进行数据融合,从而得到三个姿态角(翻滚角、偏航角与俯仰角)。数据采集则采用互补滤波算法,以便得到更精确的姿态角数值。
基于STM 32单片机的姿态检测调节系统,实际上就是能够为用户实时提供飞行器姿态信息的微型惯性检测系统,姿态检测模块由三轴加速度和三轴陀螺仪传感器组成,为用户提供飞行器的加速度和角速度数据等信息,这些实时数据经处理器姿态解算后即可获得飞行器的姿态角。姿态检测系统是由STM 32单片机及其外围电路组成,STM 32作为整个姿态检测系统的核心,其主要功能是通过I/O口将传感器MPU6050中加速度计和陀螺仪以及数字罗盘HMC5883L得到的数据,通过硬件接口I2C总线采集获得,然后主控芯片上进行换算,滤波,姿态解算,最终得到四轴飞行器的3个姿态角—翻滚角(roll)、俯仰角(pitch)、偏航角(yaw)[4]。
MPU6050是集成了三轴加速度计、三轴陀螺仪的传感器。其中,三轴陀螺仪传感器部分输出的是无符号的16位二进制数据,然后经过算法处理后可计算出角速度[5]。同样,三轴加速度计输出的也是无符号16位二进制数据,同三轴陀螺仪一样可得出加速度。数字磁罗盘HMC5883L主要是通过微机械器件的姿态检测系统提供导航角,通过磁偏角的补偿,从而得到四轴飞行器的实际航向角。
姿态检测系统模块上电运行后,MPU6050传感器开始进行数据信息的采集。由于MPU6050的数据格式为16位无符号的整型数据,数据大小范围为-32 768~32 768,负数的十六进制范围8000~FFFF,正数的范围为0~7FFF。所采集到的陀螺仪数据和加速度数据可根据程序中设置好的量程进行标度转换,进而得到比较直观的数据;而数字罗盘HMC58883L的数据是以16位二进制补码的形式输出,因此,要先得到其原码,同时将传感器的数据进行校正,最后再将经滤波算法处理后的数据送给处理器进行处理[5]。
由于传感器与处理器之间的数据通信方式是硬件I2C总线的形式,处理器采用的是STM 32是32位单片机,只能接受数据格式为32位的数据,MPU6050对陀螺仪和加速度计分别采用了3个16位的ADC模数转换器,数字罗盘HMC58883也是16位的数据,二者输出的数据格式都是16位的无符号数据形式,所以将数据接收到后还需要额外进行处理,在处理器上进行数据合成。系统上电初始化后,将姿态采集模块实时采集到的三轴加速度数据和角速度数据经硬件I2C总线传输给处理器,处理器依据互补滤波更新算法将得到的实时数据进行数据捏合,从而得到实时的姿态角。系统工作程序流程如图1所示。

图1 系统工作流程图
2 图像处理技术研究
随着并行处理技术的快速发展,并行计算技术正不断应用于除了科学计算领域之外的众多工程领域,比如图像处理、遥感技术、流体力学、生物识别等等。其中,图像并行处理技术更是在传统的图像处理领域中发挥着越来越重要的作用。然而,并行处理技术在图像处理方面的发展也面临着诸多挑战。例如如何提高并解决实际复杂问题的能力,像图像处理中复杂问题的求解方法和处理速度是否能高速化等。并行处理技术在大多数图像工程中所能发挥多少效益取决于实际应用的复杂性以及应用部门对系统价格的要求和承受能力。本文针对实际应用中的图像处理,通过修改串行算法的结构、改变计算问题的模式、利用现有的可用资源对其进行加速和优化,提高其执行效率,最大限度减少计算的耗时[6]。
其中数字图像处理主要包括以下内容:
1) 图像的增强和复原:其目的是为了提高图像的质量、去除干扰噪声、提高图像的清晰度等。该技术主要是强化图像高频分量,使图像中的物体轮廓更加清晰,细节更明显等,可减少图像中干扰噪声的影响。图像复原需了解图像降质的各种因素,根据降质过程建立降质模型,然后选用滤波算法,恢复或重建出原图像[7]。
2) 图像的时域-频域变换:图像变换就是通过时域和频域的变换找到图像中的特征,再加以变换的过程。傅立叶变换是最基础的图像变换技术。在傅立叶变换的基础上又有沃尔什—哈达玛变换、离散余弦变换和小波变换等等[8]。
3) 几何处理:该技术主要有图像的坐标转换,图像的移动、放大、旋转、缩小,多个图像的配准以及图像扭曲校正等。几何处理是最常见的图像处理手段之一,几乎所有图像处理软件都提供了最基本的图像缩放功能[9]。
4) 图像编码:图像编码属于信息论中信源编码的范畴,其主要的思想是利用图像信号的统计特性和人类视觉特性对图像进行高效数字编码,从而达到压缩图像目的。
5) 图像分析及理解:图像分析及理解是图像处理技术的发展和深入,主要分成有图像的描述以及图像的分类识别。图像分类识别属于模式识别的范畴,其主要内容是图像经过增强、复原、压缩后,进行图像分割和特征提取再判别。
3 仿真和分析
从上位机显示结果来看,飞行器姿态检测模块处于平放状态时,三轴加速度数据中Z轴加速度约为9.72 m/s,X、Y轴加速度数值都几乎为零,X、Y、Z轴角速度数据也几乎都为零,此时就将它们作零处理,利用互补滤波更新算法解算出四轴飞行器的姿态,将飞行器向上翻转90度,平放后再将其横向翻转90度,分别记录上位机俯仰角和翻滚角的数据,并通过matlab软件绘出其波形的变化,如图2和图3所示。

图2 俯仰角波形图

图3 翻滚角波形图
本文中姿态角的标准值不能精确确定,偏航角的值几乎确定不了。由于定义俯仰角和翻滚角的范围在0到90度之间,也只能确定其两端的标准值分别为0度和90度。所以这次设计在计算角度的精度时,只选择计算标准值为90度下的精度。将四轴飞行器的姿态检测模块横向翻转90度,取连续的十组翻滚角数据,再将该模块放平,之后再将其竖向抬起90度,取连续的十组俯仰角数据,记录下来并绘成表格如下。

表1 翻滚角和俯仰角
由上表,可分别计算出俯仰角和翻滚角精度。其中,翻滚角的精度为:
(1)
通过表格计算出俯仰角的精度为:
(2)
如果俯仰角和翻滚角的精度在可控范围之内,说明数据基本准确。从结果分析来看,在数据结果与标准值之间存在一定的误差,导致误差的原因主要是由于外部振动干扰以及磁场的干扰,这些微小干扰都会导致传感器的输出数据不准确进而形成一定的数据误差。本文通过对四轴飞行器轨迹进行跟踪和记录,如图4所示。
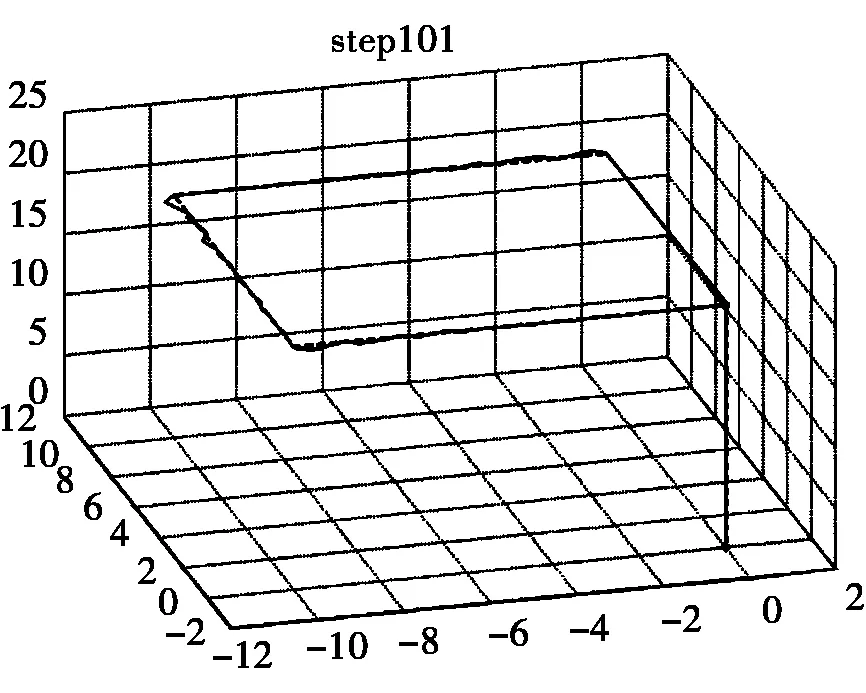
图4 四轴飞行器轨迹跟踪结果
通过串口获取MPU6050的实时数据,将其显示在matlab上,其中运行结果中左边读出的33.76是MPU 6050读出来的温度数值,右边的7是代表CPU使用率为7%;中间波形是进行姿态解算时所获得的各种参数波形变化;右下角通过输入pitch roll yaw三个欧拉角,在空间中实现飞行器的姿态的实时获取,如图5所示。
图5 空间飞行器姿态实时获取结果
对四轴飞行器调试,同时进行多四旋翼集群仿真,其集群运动效果仿真如图6所示。

图6 四轴飞行器集群运动效果
4 结束语
本文介绍了基于四轴飞行器平台远程视频图像传输技术的实现方式,通过由STM 32作为核心构成的姿态检测系统,通过I/O口将传感器MPU6050中加速度计和陀螺仪以及数字罗盘HMC5883L得到数据,所采集的数据可根据程序中设置好的量程进行标度转换,进而得到比较直观的数据;而数字罗盘HMC58883L的数据是以16位二进制补码的形式输出,同时将传感器的数据进行校正,最后再将经滤波算法处理后的数据送给处理器进行处理。本文通过仿真研究了四轴飞行器的俯仰角和翻滚角,在此基础上,通过matlab等仿真工具获得四轴飞行器的轨迹以及姿态实时获取结果,并对四旋翼集群运动效果进行了仿真。结果表明本文所实现的四轴飞行器姿态检测调节系统有着稳定的性能,该方向的研究有着广阔的应用前景。
[1] 刘峰.四轴飞行器姿态系统设计[J].通信电源技术,2015(5):144-147.
[2] 江杰.四旋翼飞行器的动力学建模及PID控制[J].电子设计工程,2013,21(23):147-150.
[3] 谭浩强.C程序设计[M].北京:清华大学出版社,2010:6.
[4] Borregas Ave,Sunnyvale.CA 94089 U.S.A.MPU-6000 and MPU-6050 Register Map and Descriptions Revision 3.2[M].USA,2011:10.
[5] 江斌.小型四旋翼低空无人飞行器综合设计[D].杭州:浙江大学,2013.
[6] 杨帆.数字图像处理与分析[M].第2版.北京:北京航天航空大学出版社,2010.
[7] 高彦平.图像增强方法的研究与实现[D].青岛:山东科技大学,2005:37.
[8] Rafe C,Gonzlez,Richard E.Woods.Digital Image Processing(Second Edition)[M].Prentice,USA.2006:9.
[9] Greg Buczek.Picture Theory[M].McGraw-Hill Osborne Media,2006:10.
Research on Remote Video Image Transmission Technology Based on Four Axis Aircraft
Liu Fuqi1, Ji Baofeng1, Li Wankun2, Shen Sen1, Sun Yanzeng1, Xu Suli1
(1.InformationEngineeringCollege,HenanUniversityofScienceandTechnology,LuoyangHenan471023,China;2.ChinaNancheGroupLimitedbyShareLtd,LuoyangHenan471000,China)
According to the feature that the posture of four axis aircraft can be adjusted by changing the motor speed, the paper designs a posture detection and control system through the manner analysis on four axis aircraft. It studies the remote video image transmission technology and the roll and pitch angles are obtained and analyzed through simulations. On the basis of the research, the paper achieves the track and posture result in real time through matlab simulations and explores the trunk effect of four rotors. The results show that the proposed detection and control system has stable performance and has broad application prospects.
four axis aircraft; image process; wireless video transmission
2017-01-20
国家自然科学基金资助(U1404615);教育部产学合作协同育人项目(201602011005);河南科技大学SRTP基金资助(2016038);河南科技大学教育教改项目(2015YB-033;2015ZD-010)
刘富起(1995- ),男,河南洛阳人,本科生,主要研究方向为FPGA设计研发、无线通信模块设计等。
1674- 4578(2017)02- 0078- 05
TN919.8
A
