一种新型永磁同步电动机伺服控制系统设计
2017-05-16林建洪方丽芳莆田学院机电工程学院福建莆田51100福建省激光精密加工工程技术研究中心福建莆田51100莆田华侨职业中专学校福建莆田51117
林建洪,方丽芳(1.莆田学院 机电工程学院,福建 莆田 51100 ;2.福建省激光精密加工工程技术研究中心,福建 莆田 51100;. 莆田华侨职业中专学校,福建 莆田 51117)
一种新型永磁同步电动机伺服控制系统设计
林建洪1,2,方丽芳3
(1.莆田学院 机电工程学院,福建 莆田 351100 ;2.福建省激光精密加工工程技术研究中心,福建 莆田 351100;3. 莆田华侨职业中专学校,福建 莆田 351117)
为改善交流伺服系统的性能,提出一种新型永磁同步电动机伺服控制系统结构。位置控制器采用PI型,速度闭环中仅采用一个可调的速度反馈系数。在速度动态中,由于没有积分作用,不会出现速度环饱和现象,速度环始终处于闭环调节过程中。仿真和实验结果表明:在系统极点配置一样的情况下,新型结构伺服系统位置跟踪的幅值误差和相位误差均比传统结构伺服系统小。
交流伺服;新型结构;极点配置
1 新型伺服控制策略结构及其分析
传统结构伺服系统的组成和控制框图分别如图1、图2所示,由电流环、速度环和位置环构成[1-3]。

图1 传统结构伺服系统的组成 图2 传统结构伺服系统框图
假设电流控制系统的截止频率已达到速度控制系统截止频率的5倍以上,可以忽略电流环控制误差,认为其闭环传递函数为1[4]。由图1可知,位置开环传递函数和闭环传递函数分别为式(1)、式(2):
(1)
(2)
该控制系统的典型特点在于速度环采用PI控制器,在速度动态过程中速度PI可能会进入饱和状态,使得速度失去闭环跟踪调节作用。位置环采用P调节器,若要在动态中消除位置动态跟踪误差,必须取足够大的比例系数,但为了满足位置闭环稳定性要求,比例系数又不宜选择太大,这样造成位置控制动态性能要求和稳态性能要求矛盾。
为了解决传统结构中位置闭环中动态性能要求和稳态性能要求矛盾问题。本文提出一种新型的伺服控制结构,其控制系统组成如图2所示,其中位置控制器采用PI型,速度闭环中仅存在速度反馈系数一个可调系数。在速度动态中,由于没有积分作用,不会出现速度环饱和现象,速度环始终处于闭环调节过程中。

图3 新型结构伺服控制系统组成
图3所示的新型结构伺服控制系统所对应的伺服控制系统框图如图4所示。其中kw为转速反馈系数,kpθ、τθ分别为位置控制器的比例系数和积分系数。
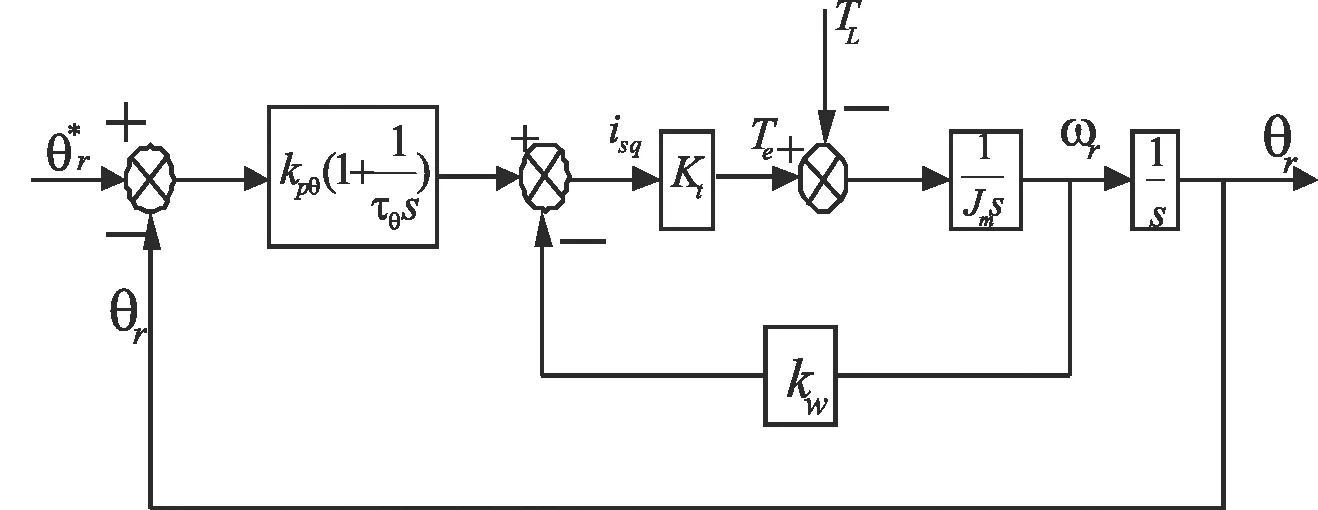
图4 新型结构伺服控制系统
由图4可知:系统的位置开环传递函数和闭环传递函数分别为式(3)、式(4):
(3)
(4)
若图2所示的系统和图4所示的系统在极点配置一样的情况下,可得式(2)和式(4)有关数学关系:
(5)
实际系统中转矩系数Kt为0.098,转动惯量Jm为6×10-5kg·m2,工程参数整定[5]可取
(6)
则传统结构伺服系统位置开环传递函数为:
(7)
将式(6)代入式(5)可得:
(8)
则新型结构伺服控制系统位置开环传递函数为:
(9)

图5 传统结构伺服系统位置环的bode图 图6 新型结构伺服系统位置环的bode图
2 仿真研究
为了验证上述理论,利用Matlab中Simulink模块对系统进行建模仿真。控制周期为50 μs,传统结构位置伺服系统的速度控制器比例系数和积分系统分别为0.1和0.53,位置控制器比例系数为100,根据式(5)可得新型结构位置伺服系统的速度反馈系数为0.1,位置控制器比例系数和积分系统分别为10.53和53,电流控制器的参数取同样值,仿真波形如图7和图8所示。其中位置给定为10 sin(2 πf),由图7和图8对比可知:在系统极点配置一样的情况下,新型结构伺服系统位置跟踪的幅值误差和相位误差均比传统结构伺服系统位置跟踪的幅值误差和相位误差小。
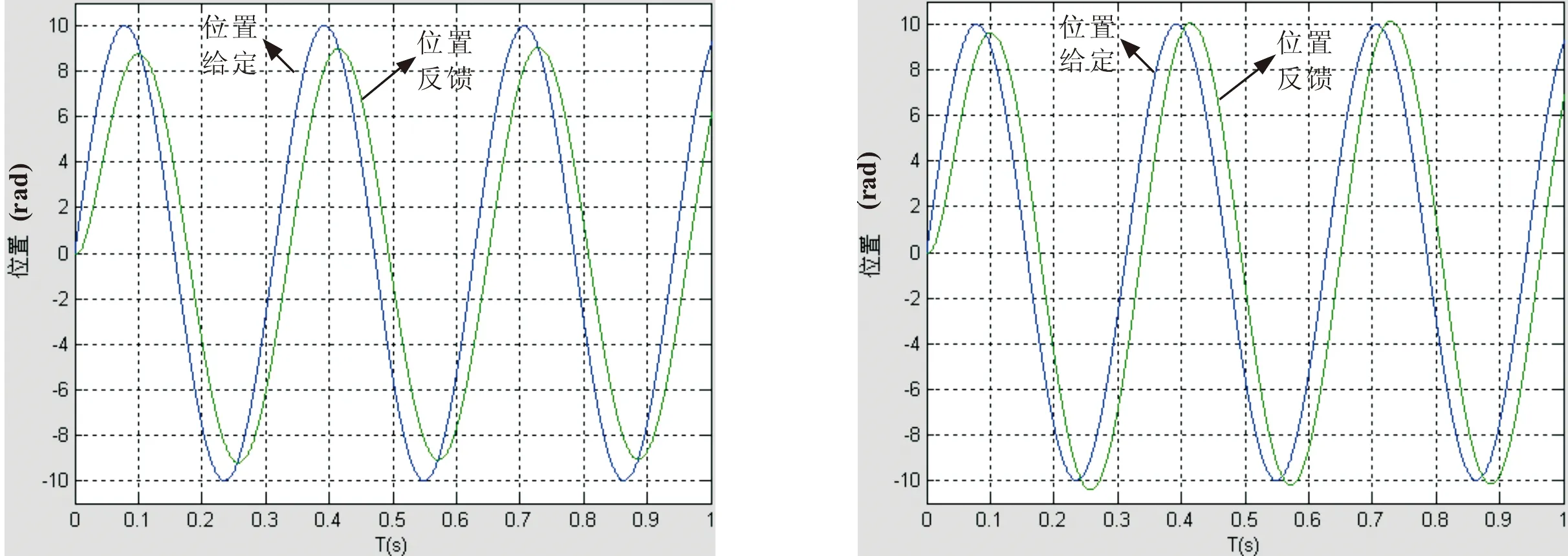
图7 传统结构f=20 Hz时位置响应波形 图8 新型结构f=20 Hz时位置响应波形
3 实验研究
实验硬件系统是以TI公司TMS320F2808DSP为核心构成的,采用额定功率为370 W、额定转速为3 000 r/min的永磁同步电动机作为控制对象。对传统结构系统和新型结构系统分别做位置给定为2 500 sin(2 πf)的位置跟踪实验,如图9~图12所示。其中图9传统结构伺服系统速度控制器的比例系数和积分系数分别取0.1和0.000 2,位置控制器比例系数取0.1。在极点配置一下情况下,根据公式(5)可得新型结构伺服系统速度反馈系数取0.1,位置控制器比例系数和积分系数分别取0.010 2和0.000 02。图11传统结构伺服系统速度控制器的比例系数和积分系数分别取0.1和0.000 2,位置控制器比例系数取0.2,则对应的新型结构伺服系统速度反馈系数取0.1,位置控制器比例系数和积分系数分别取0.020 2和0.000 04。由图9、图10和图11、图12对比可知:在系统极点配置一样的情况下,新型结构伺服系统位置跟踪的幅值误差和相位误差均比传统结构伺服系统小,特别是新型结构伺服系统位置跟踪误差很小。

图9 传统结构f=2.5 Hz时位置响应波形 图10 新型结构f=2.5 Hz时位置响应波形
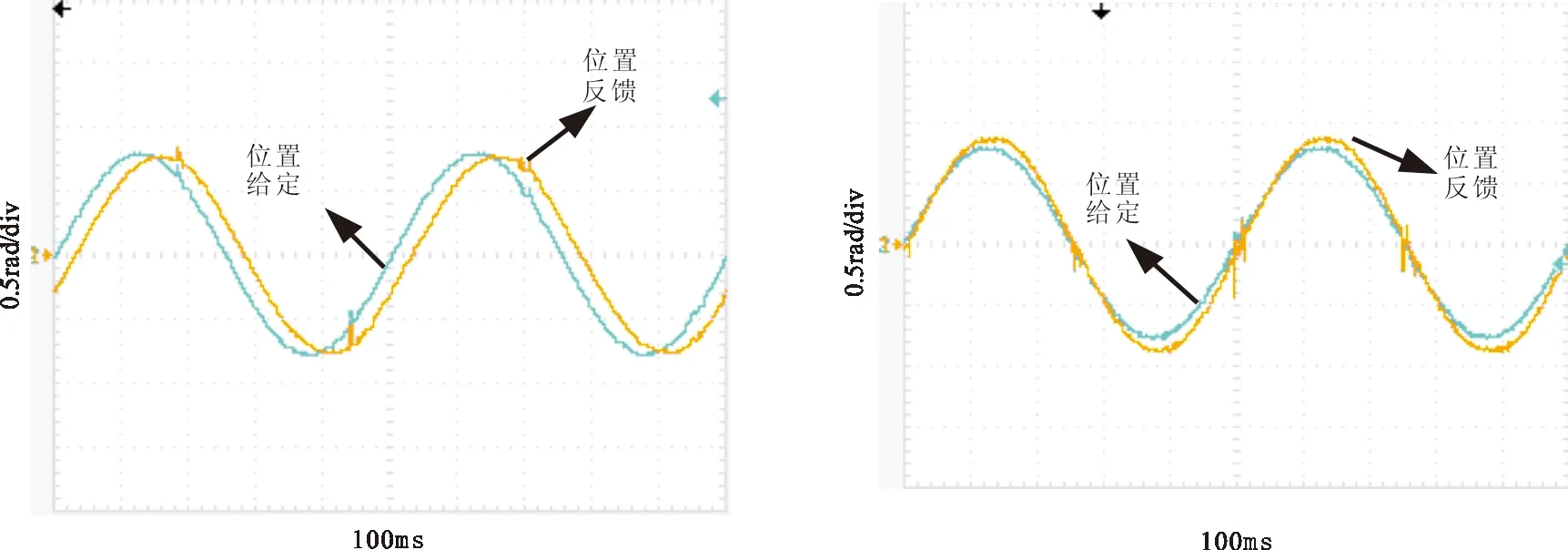
图11 传统结构f=2 Hz时位置响应波形 图12 新型结构f=2 Hz时位置响应波形
4 结论
提出并研究了一种新型永磁同步电动机伺服系统控制结构,其中位置控制器采用PI型,速度闭环中仅存在速度反馈系数一个可调系数。仿真和实验结果表明:在系统极点配置一样的情况下,新型结构伺服系统位置跟踪的幅值误差和相位误差均比传统结构伺服系统小。
[1] Ntogramatzidis L, Ferrante A. Exact tuning of pid controllers in control feedback design[J]. Control Theory & Applications, IET, 2011, 5(4): 565-578.
[2] Bolognani S, Tubiana L, Zigliotto M. Extended Kalman filter tuning in sensorless PMSM drives [J]. IEEE Transactions on industrial applications,2003,39(6):1741-1747.
[3] 王宏,于泳,徐殿国.永磁同步电动机位置伺服系统[J].中国电机工程学报,2004,24(7):151-155.
[4] 吉智,何凤有.永磁同步电机运行性能研究[J]. 机械设计与制造,2012,23(3):234-236.
[5] 陈伯时.交流调速系统[M].北京:机械工业出版社,1998.
Design of a novel permanent magnet synchronous motor servo control system
LIN Jian-hong1,2, FANG Li-fang3
(1.SchoolofMechanicalandElectricalEngineering,PutianUniversity,Putian351100,China; 2.KeyLaboratoryofModernPrecisionMeasurementandLaserNondestructiveDetectioninFujianProvince,Putian351100,China; 3.FujianPutianHuaqiaoVocationalSecondarySchool,Putian351117,China)
In order to improve the performance of AC servo system, this paper presents a new control system of permanent magnet synchronous motor servo system.The position controller adopts PI type, and only one adjustable speed feedback coefficient is adopted in the speed loop. Therefore, in the speed of dynamic, there will be no saturation of the velocity loop because there is no integral effect,and the speed loop is always in the process of closed-loop regulations. The simulation and experimental results show that the new structure of position tracking servo system of the amplitude error and phase error are smaller than the traditional structure of position tracking servo system of the amplitude error and phase error in the case of the same system pole assignment the system poles of the same situation.
AC servo; new structure; pole configuration
2017-03-01
莆田市科技计划项目(2016G2022);福建省高校重点实验室开放基金项目(s20150402);莆田学院校级科研项目(2015030)
林建洪(1986—),男,福建莆田人,硕士,讲师。
1674-7046(2017)02-0088-05
10.14140/j.cnki.hncjxb.2017.02.016
TM341
A
