全回转桨船静水及风浪中模型试验对比分析
2017-05-16吴兴亚高霄鹏
吴兴亚,高霄鹏
(海军工程大学 舰船工程系,武汉 430033)
全回转桨船静水及风浪中模型试验对比分析
吴兴亚,高霄鹏
(海军工程大学 舰船工程系,武汉 430033)
针对全回转桨船型及其在风浪中操纵性能分析规程的不完备性,以某全回转桨船模为研究对象,在湖泊中开展回转、Z形以及航向稳定性的风浪大尺度自航模试验,并与静水中的试验结果进行对比,分析总结全回转桨船舶在静水及风浪中的操纵性能,为风浪中船舶操纵试验规程的建立提供依据。
全回转桨;操纵性;风浪;自航模试验
随着航运业的发展,对于船舶的操纵性要求越来越高。目前,一般采用基于特征参数的回归公式或数据库[1]的方法、自航模试验[2]方法,以及基于数学模型的数值计算[3]方法对船舶初始设计阶段的操纵性进行研究预报。试验研究作为预报船舶操纵性最为可靠的方法,可以验证理论计算以及数值仿真结果的正确性,已经得到广泛的应用[4]。
区别于常规的推进装置,作为桨舵合一的全回转推进器,可以绕轴线作360°回转,能够获取各个方向上的最大推力,使船舶拥有异常灵敏的操纵性,能够实现船舶的原地回转、横向移动、紧急后退,以及在微速范围内进行操舵等特殊驾驶操作[5]。同时,由于全回转推进装置的灵活性,导致全回转桨船舶操纵机动性强的同时航行稳定性较差[6],而目前国内外学者对于全回转桨船舶操纵性的试验研究[7-10]大部分是基于静水环境,对于其风浪中[11]的操纵性能的探究相对较少,同时,对于风浪中船舶操纵性能分析标准,目前尚无相应的规程规范可参照。鉴于此,针对某全回转桨船模,进行在风浪中的大尺度自航模试验,并与静水中操纵性试验结果相比较,探究其在风浪中的操纵特性。
1 自航模试验
1.1 试验模型
计算对象是一艘全回转桨推进民用打捞船背景的玻璃钢船模,船模的量纲—的量化主要参数见表1。所用推进装置为1对吊舱式全回转对转桨,桨的主要几何参数见表2[1]。

表1 船模量纲一的量化主要参数
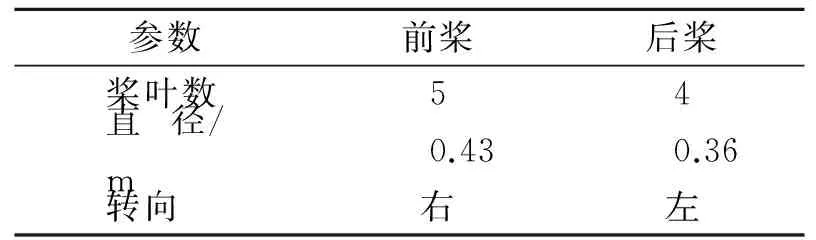
表2 螺旋桨主要几何参数
1.2 试验测量系统
自航模测控系统全部由计算机完成对船模的操控及运动参数的采集。自航模控制系统由岸上基地操纵系统、船载执行系统、数据采集系统组成,其中采用GPS定位系统记录船舶轨迹,标称平面椭圆误差为2 cm;采用惯导系统测量模型的相关运动参数;采用超声波式浪高仪测定试验现场的浪高、流速;采用YGY-FSXY1风速风向仪测量试验现场风速风向。数据传输采用无线通讯设备,将记录数据及时传回岸基控制系统,主要采集数据参数包括:倾角、航速、航向、坐标位置、三轴加速度、三轴角速度、舵机的转舵时间和转舵的角度、主推电机转速、主机的运行工况等。
1.3 试验内容
试验在某开阔水域中进行,湖泊水深为15~20 m,试验现场湖底目标处的流速为0.75 m/s,湖面浪高为11.5 cm,风速为1.0~1.4 m/s,满足自航模试验在蒲氏二级风以下的国标要求。
1.3.1 回转操纵性试验
回转试验中,船模航速为2 m/s,试验范围从右满舵(35°舵角)至左满舵间选取±35°、±30°、±25°、±20°、±15° 10个舵角。试验中实时记录船模的运动轨迹和艏向角,测定稳定回转中的战术直径、横倾角等参数,记录试验过程中航速的变化、回转角速度,以及回转周期等数据,同时实时监测记录试验现场的波浪环境。
1.3.2 Z形操纵性试验
Z形操纵试验中,试验在船模航速2 m/s,舵角为±10°、±20°下进行。试验中连续记录航速、舵角及艏向角随时间的变化,以及实时监测记录现场的波浪环境。
1.3.3 航向稳定性试验
在V=2 m/s下进行风浪中的航向稳定性试验,当船舶直航加速操舵至稳定回转后,操舵回零,记录艏向角及舵角,检测船模剩余角速度。
2 试验结果及分析
2.1 回转试验分析
图1、图2为风浪及静水中船舶回转运动过程中的轨迹时历曲线。由图2可见,风浪对船舶回转产生了显著影响,使船模在回转过程中产生了一个较为明显的漂移量,使回转轨迹线呈一明显的螺旋线形状,而静水中的回转效果较为理想。
图3为风浪及静水中战术直径对比曲线,根据《舰船通用规范》,水面舰船的回转能力可以以无因次战术直径的值来衡准。如图5所示,在静水及风浪环境中,随着所操舵角的增大,战术直径均不断减小,而风浪中各执行舵角下的战术直径比静水中增大44%~52%,但均满足规范中满舵回转时无因次战术直径不大于4.5的要求。结果表明风浪中全回转桨船的回转性能减低明显。
图4为风浪及静水中速降对比曲线,可以看出速降系数随着执行舵角的增大而减小,风浪中速降系数较静水中增大约8.6%~21.3%,说明风浪中船舶回转时航速较静水中大,而在满舵(35°)回转时速降均在50%以下,即均可以在紧急情况下有着较好的紧急避让效果,风浪中的旋回性能相对较差[12]。
图5、图6为静水和风浪中的横倾角,以及最大横倾角对比曲线。与常规推进船舶不同,全回转桨船舶的横倾角随着操舵角的增大而减小,静水中的减小趋势较风浪中明显;而最大横倾角随着操舵角的增大不断增大,且风浪中增幅较大。表明全回转桨船舶风浪中回转初始阶段受横向力矩较大,风险较静水中较高,而稳定回转中稳性较好。
图7为约4级海况不同航速下回转漂移量与操舵角的关系曲线,随着所操舵角的增大,船舶的回转漂移量不断减小,同时可以看出风浪中船舶的回转漂移量相对较大,表明风浪对回转性能产生的较大影响,大大降低了船舶的回转性能。
2.2 Z形操纵试验分析
图8、图9为风浪中Z形操纵试验的时历曲线和艏向角曲线,如表3所列,风浪中船模运动的超越角和航向稳定性指数T′均小于静水中的数值,表明该船在风浪中的应舵性优于静水中;静水中K′较大,表明静水中船舶的回转能力优于风浪中;静水中的无因次初转期较小,表明船舶在静水中的初始回转性能较优;风浪中船舶的转艏性能指数P值大于静水中,对于全回转桨船型,转艏指数必须与表示稳定性的指数联合应用才能全面反映其操纵性能。
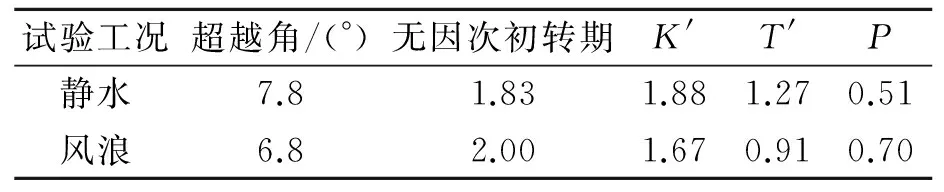
试验工况超越角/(°)无因次初转期K'T'P静水7.81.831.881.270.51风浪6.82.001.670.910.70
2.3 航向稳定性试验
图10为回舵过程中舵角、艏向角随时间的变化曲线,由图可知,随着舵角回0,船模的艏向角不断减小趋近于0,且试验中最终的剩余角速度小于1°/s,达到了规范中的航向稳定性要求,表明该全回转桨船风浪中的航向稳定性相对较好。
3 结论
1)回转试验中,风浪中船模轨迹呈明显螺旋线,产生了回转漂移量,其各执行舵角下的战术直径较静水中增大44%~52%,速降系数增大8.6%~21.3%,表明风浪中船舶回转性能较静水中减低明显,旋回性能变差,但在紧急情况下依然有着紧急避让效果。
2)回转试验中,船舶最大横倾角在静水及风浪中皆遵循随舵角增大而不断增大的规律,风浪中增幅较大,而静横倾角随着舵角的增大而不断减小,静水中减幅较大,表明风浪中船模受横向力矩较大,面临风险较高,但稳定回转中稳性较好。
3)Z形试验中,通过对船模性能指数K′、T′以及P的计算分析表明,船舶在风浪中的应舵性高于静水中,而在静水中的回转能力较强,初始回转性能较优。
4)本文以某全回转对转双桨大尺度船模为对象,对比研究其静水及风浪中的操纵特性,相较前人研究的常规推进船型,有着较为相异的操纵特性规律。该研究可为今后全回转桨船舶操纵性能的船模试验以及仿真预报提供参考依据,对改善全回转桨船的实际操纵具参考意义,同时可为风浪中全回转船舶操纵规程的建立提供依据。
5)针对全回转桨船在不同航行工况下机动灵活但缺乏较高稳定性的特点,下一步拟建立该型船舶在风浪中的低频操纵运动方程,进行船舶的保向舵角计算,深入研究不同风浪等级、不同航速下全回转桨船舶的保向性能以及航向稳定性。
[1] 杨盐生,蒋维清,贾传荧.数据库方法在船舶操纵数学模型参数计算中的应用[C].大连:中国造船工程学会船舶力学学术委员会第六届船舶操纵学术研讨会,1992:228-238.
[2] ARTUSZUK J. A look into motion equations of the ESSO OSAKA maneuvering[J]. International Shipbuilding Progress,2003,50(4):297-315.
[3] MOREIRA L, SOARES C G. Dynamic model of maneuverability using recursive neural networks[J]. Ocean Engineering,2003,30(13):1669-1697.
[4] 赵杨.船舶适航性与操纵性自航模系统设计[D].哈尔滨:哈尔滨工程大学,2010.
[5] 王培生.全回转推进器的水动力性能研究[D].哈尔滨:哈尔滨工程大学,2007:4-13.
[6] 施浩,许劲松,张华.全回转舵桨船航向控制研究[J].船舶工程,2013,35(3):59-62.
[7] TOXOPEUS S, Loeff G. Manoeuvring aspects of fast ships with pods[C]. Proceedings of the 3rd International Euro Conference on High-Performance Marine Vehicles HIPER 02. Bergen,2002:392-406.
[8] GRYGOROWICZ M, SZANTYR J A. Open water experiments with two pod propulsor models[C]∥ ATLAR M, CLARKE D, GLOVER E J, et al, eds. Proceedings of the First International Conference on Technological Advances in Podded Propulsion. University of Newcastle, UK,2004,2004:357-370.
[9] 陈宇庆.浅谈全回转拖船的回转试验[J].广东造船,2001(4):28-29.
[10] 刘洪梅,许文兵,陈雄,等.吊舱推进与传统推进船舶操纵性能对比分析[J].船舶力学,2011,15(5):463-467.
[11] 师超,韩阳,赵战华,等.全回转拖轮波浪中操纵性自航模试验[C].中国造船工程学会船舶力学学术委员会第八次全体会议文集,大连:船舶力学学术委员会,2014.
[12] 李宗波.船舶转向过程中速度下降问题的研究[D].大连:大连海事大学,2008:31-42.
Comparative Analysis on Model Test in Static Water and Waves for Full-revolving Propeller Boat
WU Xing-ya, GAO Xiao-peng
(Dept. of Naval Architecture Engineering, Naval University of Engineering, Wuhan 430033, China)
Based on the incompleteness of analytical procedures for maneuverability, a full-revolving propeller boat was taken as the research object, the free-running model tests were carried out in the lakes and waves, including circle test, the zigzag test and course stability test. The testing results were compared with that of static water test to explore the maneuvering performance of the full-revolving propeller boat in the static water and waves, and provide the basis to establish the ship maneuverability test procedures in storm.
full-revolving propeller; maneuverability; waves; free-running model test
10.3963/j.issn.1671-7953.2017.02.014
2016-07-18
吴兴亚(1992—),男,硕士生
U661.33
A
1671-7953(2017)02-0062-04
修回日期:2016-08-04
研究方向:船舶与海洋结构物设计制造
