一种额定频率补偿的改进下垂法在分布式微电网中的应用
2017-05-15杨国华
王 岳 ,杨国华 ,2
1 引言
随着国民经济的快速发展,电力负荷不断增加,能源和环境问题日益突出,基于风电、光伏等可再生能源的分布式发电(Distributed Generation,DG)已得到世界各国的重视并快速发展,但大量DG单元直接并网会给电网带来一系列的新问题。为了充分发挥可再生能源的优势,削弱DG对电网的冲击和负面影响,提高供电的可靠性,一种由分布式电源、储能系统、负荷和保护控制装置构成的微电网已成为DG单元与电网连接的有效模式[1-2]。
微电网诞生之后,如何对其进行有效控制成为研究热点之一。微电网有两种稳定运行状态,即并网运行和孤岛运行。微电网并网运行时,电压、频率受大电网的钳制作用,当负载发生变化时能够稳定在规定范围之内。为了实现间歇性电源的最大利用率,并网模式下主要选择P/Q控制方式。微电网孤岛运行时,没有大电网的钳制作用,一般用下垂控制保证微电网的稳定运行,与此同时,微电网电压频率会有稳定偏差,这使得微电网电能质量下降,不利于再次并网运行。文献[3、4]基于传统下垂控制器对DG单元逆变器进行控制,其在孤岛运行时,频率极易产生偏差。文献[5]提出了一种基于同步发电机模型的逆变器控制策略,当负荷有功功率变化时,采用了一次调频和二次调频实现系统频率的稳定。文献[6]通过切负荷实现无差调频,这种策略只有在紧急情况下使用,只能减小频率静差。文献[7、8]采用综合控制策略,由储能装置根据电网电压频率的变化,使V/F控制和下垂控制互相切换,且为了实现平滑切换,还设计了控制器状态跟随器,更有效地实现了频率的稳定,但其控制过程过于复杂。
本文依据低压微电网下垂控制,利用比例积分微分(Proportion Integration Differentiation,PID)控制器设计了灵活性较强的额定频率补偿器,在简化了控制过程的同时,实现了DG单元孤岛运行在有功功率发生变化时频率无静差。最后通过Matlab/Simulink仿真平台对改进的下垂控制系统进行了仿真,仿真结果表明了改进策略的有效性和可行性。
2 下垂控制原理
下垂控制是对等控制的典型控制方法。当系统的负荷发生变化时,多个并联的分布式电源间不需要通讯互联线,就能实现负荷的分配。对于逆变电源等效电路阻抗为感性的系统,当逆变电源输出的有功功率较大时,利用有功功率和频率的下垂特性,增大输出频率,从而减小输出的有功功率;当逆变电源输出的有功功率较小时,则利用有功功率和频率的下垂特性,减小输出频率,从而增大输出的有功功率。同理,可利用无功功率和电压幅值的下垂特性,调节逆变电源输出的无功功率。下垂控制方程如式(1)所示[11、12]。

式中,m为有功功率和频率的下垂系数,n为无功功率和电压的下垂系数,fn为电网额定频率,Pn为微电源在额定频率下的有功功率输出,U0为微电源输出无功功率为0时的电压幅值,P、Q分别为逆变电源输出的平均有功功率和无功功率。
3 改进下垂控制
3.1 改进下垂控制原理
在微电网孤岛运行方式下,若所有逆变器都采用下垂控制,当负荷发生变化时,微电网电压与频率会随着负荷增加而减小。当系统稳定后,电压和频率会产生稳定偏差,降低电能质量,不利于再次并网运行。
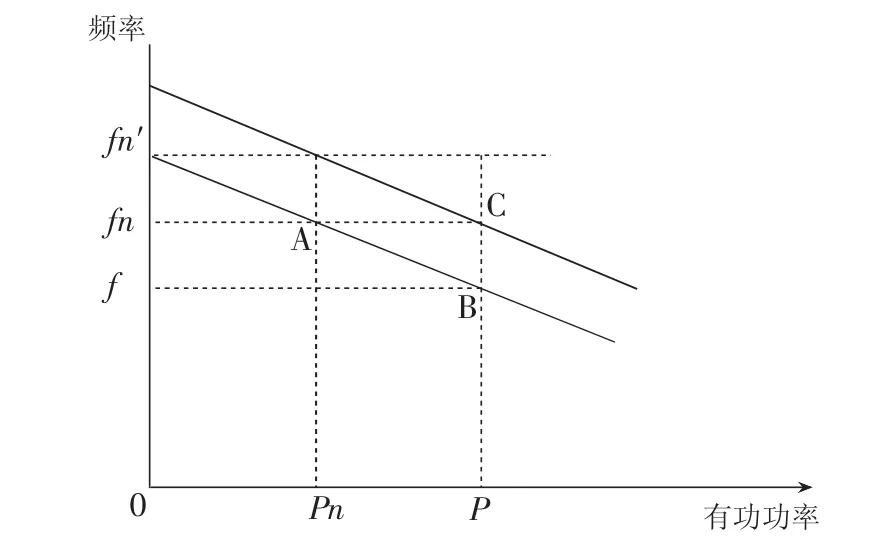
图1 P/f下垂特性
P/f下垂特性如图1所示。假设微电网初始稳定工作点为点A,当系统内有功功率增加时,根据下垂控制原理,微电网为保证稳定运行,频率会随之下降,如图中由点A运行至点B。为了改善微电网电能质量,尽可能地做到频率无静差,可将下垂特性线向上平移,即给下垂控制参考额定频率进行补偿,得到虚拟额定频率fn′,运行状态由点B运行至点C。同理可分析微电网内有功负荷降低的工作过程。虚拟额定频率可表示为:

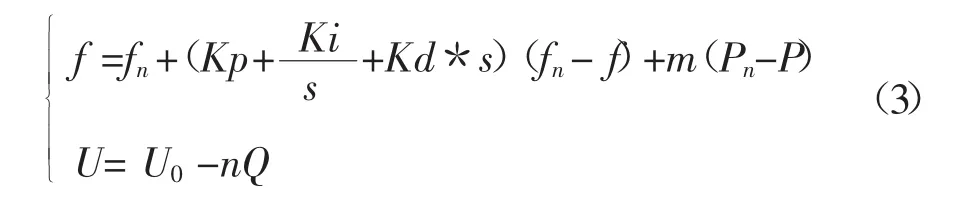
式中,fn′是经过补偿后所得的虚拟额定频率,fn是电网额定频率,Kp、Ki、Kd是PID控制器参数,f是微电网实时测量频率。采用PID控制,比例环节可以增加系统的快速性和稳态精度,积分环节可以保证系统稳态误差为0,微分环节可以改善系统的动态性能。
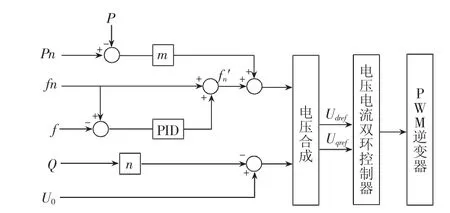
图2 改进下垂控制结构
3.2 额定频率补偿器设计
根据上述改进下垂控制原理,可设计出如图2所示的额定频率补偿控制结构。
改进后的下垂控制方程如下:
4 模型分析与算例仿真
4.1 模型分析
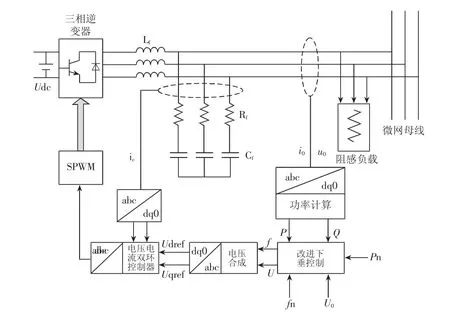
图3 下垂控制原理图
基于Matlab/Simulink软件搭建了如图3所示的控制原理图。Lf是滤波电感,Cf是滤波电容,其连接阻感性负荷。为了抑制LC滤波器发生振荡,串入了较小阻尼电阻Rf。滤波电容电压(即负载电压)为u0,滤波后的输出电流为i0,流向滤波电容的电流为ic。电容电流内环相比于电感电流内环,其外部特性更硬,而且其电容电流能更好地反应输出电压和负载的瞬时扰动变化,可以更好地适应负载变化并对负载扰动进行抑制[14],因此本文选择电容电流作为电流内环的控制量。
由图3可知,首先通过测量模块,测得逆变器经LC滤波器后的输出电流和负荷电压;再应用坐标变换,将三相交流电压和电流变为两相同步旋转的直流量,由功率计算单元和低通滤波器得到逆变器电源输出的平均有功功率和无功功率P、Q;再经过改进下垂控制器对额定频率进行补偿,并利用电压合成模块,合成双闭环控制中电压外环的参考控制电压,而电流内环的控制量选取线路电容电流;最后利用坐标旋转,合成出逆变器的三相调制信号。
4.2 算例仿真
某系统运行在孤岛模式下,其初始负荷的有功功率为200kW,无功功率为10kVar。当系统运行0.4s时给系统加入一个有功功率为20kW、无功功率为5kVar的负荷,系统再运行0.4s时切除该加入的负荷,使系统继续运行至1s,然后结束仿真。仿真参数设置如下:微电源参数为Vdc=600V,Pn=200kW,fn=50Hz,U0=311V,m=1.2e-5,n=3e-4;滤波器参数为 Rf=0.01Ω,Lf=0.6e-3H,Cf=1500e-6F;电压电流双闭环控制参数为电流内环K=5,电压外环Kup=1,Kui=100;额定功率补偿器参数为 Kp=1,Ki=100,Kd=0.01。
仿真结果如下图所示:
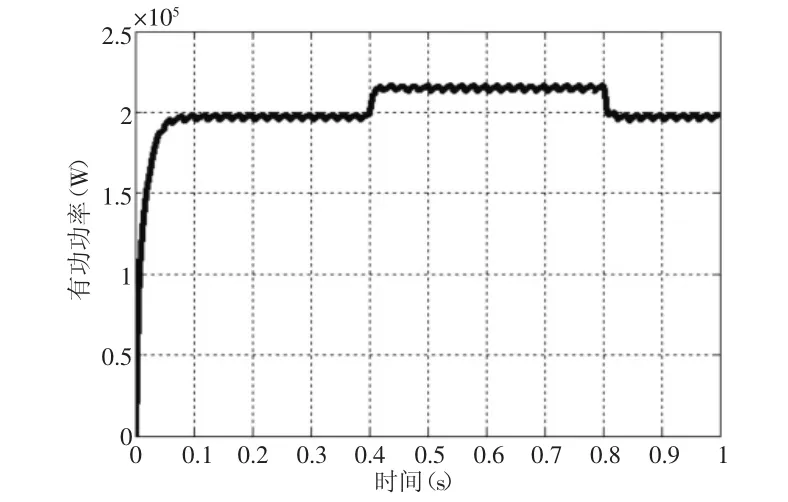
图4 改进下垂控制逆变器有功功率输出
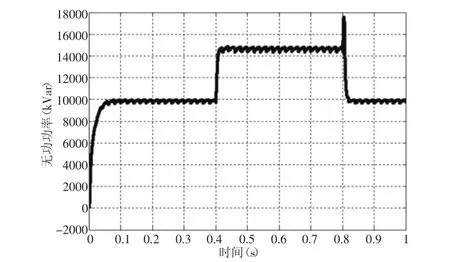
图5 改进下垂控制逆变器无功功率输出
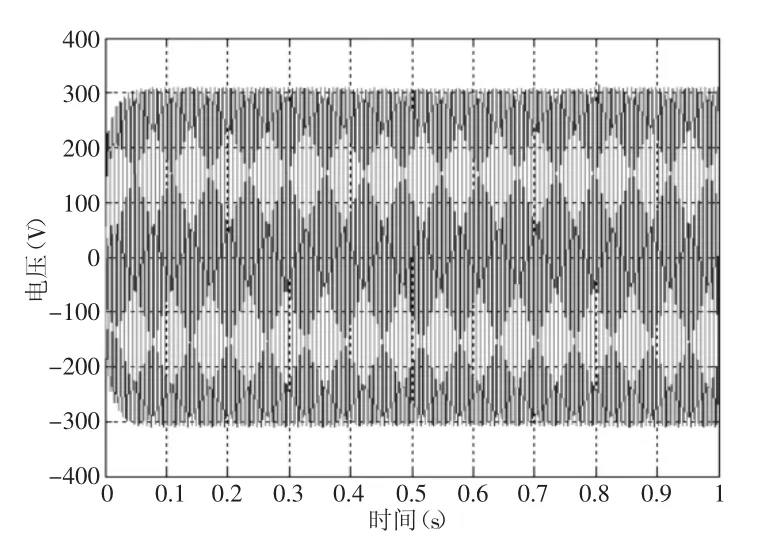
图6 改进下垂控制负载端电压
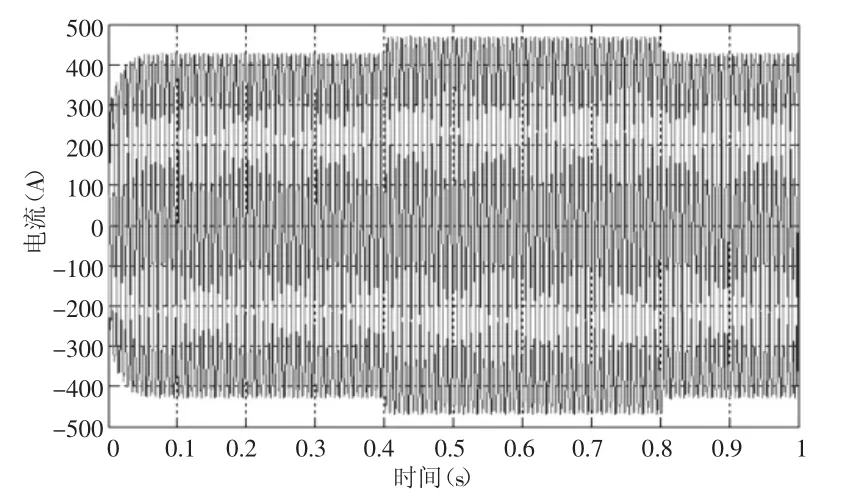
图7 改进下垂控制负载端电压电流
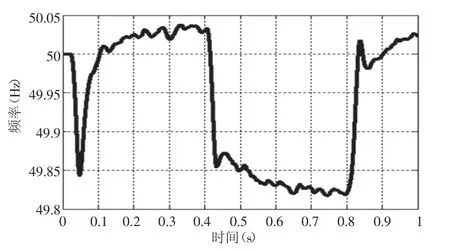
图8 改进前微电网频率
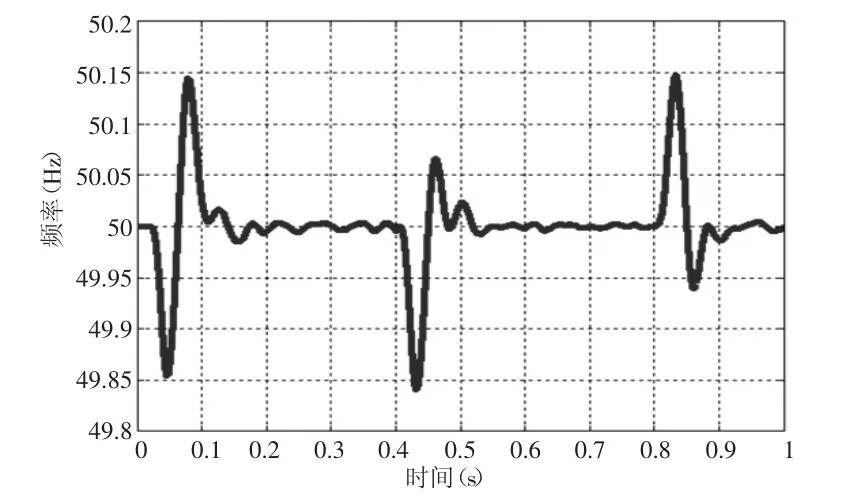
图9 改进后微电网频率
5 结束语
应用本文所提出的基于额定频率补偿的改进下垂控制方法,在简化了频率调节过程的同时,既保证了逆变电源功率的正常输出,又保证了当微电网负载增加时电压的小范围变动,并依靠电流变化调节输出功率,最重要的是保证了微电网频率的无静差,提高了微电网的电能质量,有利于其平滑并网运行。
参考文献:
[1]郑永伟,陈民铀,李 闯,等.自适应调节下垂系数的微电网控制策略[J].电力系统自动化,2013,4(7):6-11.
[2]张明锐,杜志超,王少波.微网中下垂控制策略及参数选择研究[J].电工技术学报,2014,29(2):136-144.
[3]王成山,肖朝霞,王守相.微网综合控制与分析[J].电力系统自动化,2008,32(7):98-103.
[4]王成山,肖朝霞,王守相.微网中分布式电源逆变器的多环反馈控制策略[J].电工技术学报,2009,24(2):100-107.
[5]吴蓓蓓,苏建徽,张军军,等.用于微电网孤岛运行的逆变电源控制方法[J].电力系统及其自动化学报,2011,23(1):1-5.
[6]林湘宁,李正天,薄志谦.适用于微网孤岛运行的低频减载方法[J].电网技术,2010,34(3):16-20.
[7]赵冬梅,张 楠,刘艳华,张 旭.基于储能的微网并网和孤岛运行模式平滑切换综合控制策略[J].电网技术,2013,2(2):301-306.
[8]郑竞宏,王燕廷,等.微电网平滑切换控制方法及策略[J].电力系统自动化,2011,9(18):17-24.
[9]王 鹤,李国庆.含多种分布式电源的微电网控制策略[J].电力自动化设备,2012,5(5):19-23.
[10]李 聪.基于下垂控制的微电网运行仿真及小信号稳定性分析[D].成都:西南交通大学,2013.
[11]吕婷婷.微电源控制方法与微电网暂态特性研究[D].山东:山东大学,2010.
[12]周 晨.基于虚拟阻抗的微电网下垂控制策略及谐波抑制方法研究[D].成都:西南交通大学,2014.
[13]叶 楠,孟宪会,邢 岩.逆变器电感电流和电容电流反馈控制方式的比较研究[A].航空电源航空科技重点实验室学术年会论文集[C].2005.169-174.
[14]闫 炎.微电网逆变器多环反馈控制研究[D].秦皇岛:燕山大学,2012.
[15]程志江,谢永流,等.风力发电系统网测逆变器双闭环控制策略研究[J].电测与仪表,2016,53(9):40-46.
[16]吕 义.基于下垂控制的并联逆变器建模与分析[J].电气工程学报,2016,11(5):21-29.
[17]马玉娟,杨国华,等.基于改进下垂法的微网并网控制策略研究[J].电测与仪表,2015,52(16):61-66.
[18]姚 俊,杜红彪,等.微网逆变器并联运行的改进下垂控制策略[J].电网技术,2015,39(4):932-938.
