无位置传感器的无刷直流电动机闭环起动方法
2017-05-15张青鹏戴光宇
谢 然,卞 敬,张青鹏,戴光宇
(天津市特种设备监督检验技术研究院,天津300192)
0 引 言
在无位置传感器的无刷直流电机起动过程中,悬空相的反电动势与电机转速成正比,因起动初期电机转速过低,因此悬空相的反电动势很小,造成反电动势的过零点不易测得,从而无法准确获得转子的位置信息[1]。但本文经实验发现,无刷直流电机的定子三相绕组在空间上构成耦合回路,针对三相六状态二二导通的控制方式,通电两相电流会在悬空相产生感应电压[2-3]。经理论分析和推导,可发现当选用Hpwm_Lpwm控制方式驱动电机时,通电两相悬空相的感应电压与反电动势过零点一致,但在PWM(ON)时(即功率管导通时)两者的过零点方向相反,而在PWM(OFF)时(即功率管关断续流时)两者的过零点方向相同。由于在电机起动过程中,起动电流较大,因此其所产生的悬空相感应电压比较明显,此时的悬空相感应电压远远大于悬空相的反电动势。
借助于这一原理,在无位置传感器的无刷直流电机起动过程中,可利用检测悬空相的感应电压过零点代替悬空相反电动势过零点的方法,准确获得转子位置信息。这种方法弥补了起动阶段反电动势不易检测的缺点,解决了传统无感无刷直流电机起动过程中转子位置信息难以获取,无法实现转子位置实时反馈的闭环起动问题。
1 无刷直流电机瞬态模型
由无刷直流电机的磁链方程[4]可知:

式中:Uk为相电压;R为定子绕组相电阻;Vn为中性点电压;ψk为定子k相绕组磁链。
定子的三相绕组的磁链[5]分别:
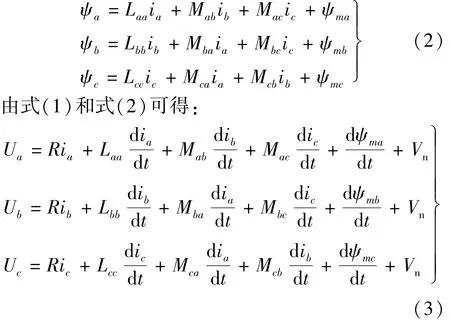
式中:Laa,Lbb,Lcc分别为A,B,C三相定子绕组的自感系数;Mab,Mac,Mba,Mbc,Mca,Mcb为三相定子绕组的互感系数,且有Mab=Mba,Mbc=Mcb,Mca=Mac;ψma,ψmb,ψmc取决于转子的位置θ,这三者的变化产生了无刷直流电机的反电动势[6],即:
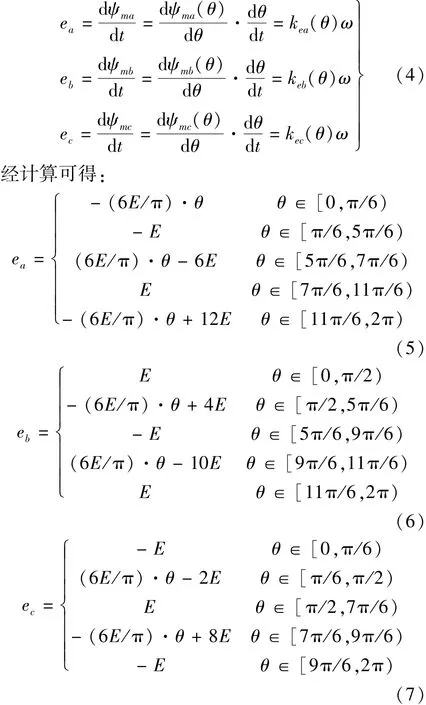
可得无刷直流电机反电动势波形如图1所示。
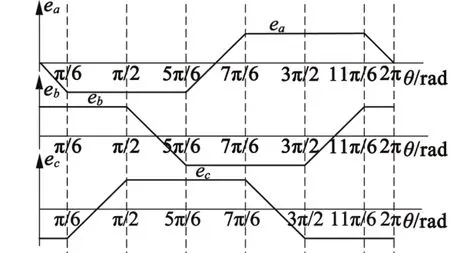
图1 无刷直流电机的反电动势波形
通电相在悬空相的感应电压是由通电相的电流、悬空相与通电相的互感系数决定的[7],结合式(3)中所叙述的无刷直流电机数学模型,可知各相的感应电压分别:
此时电机的数学模型方程:
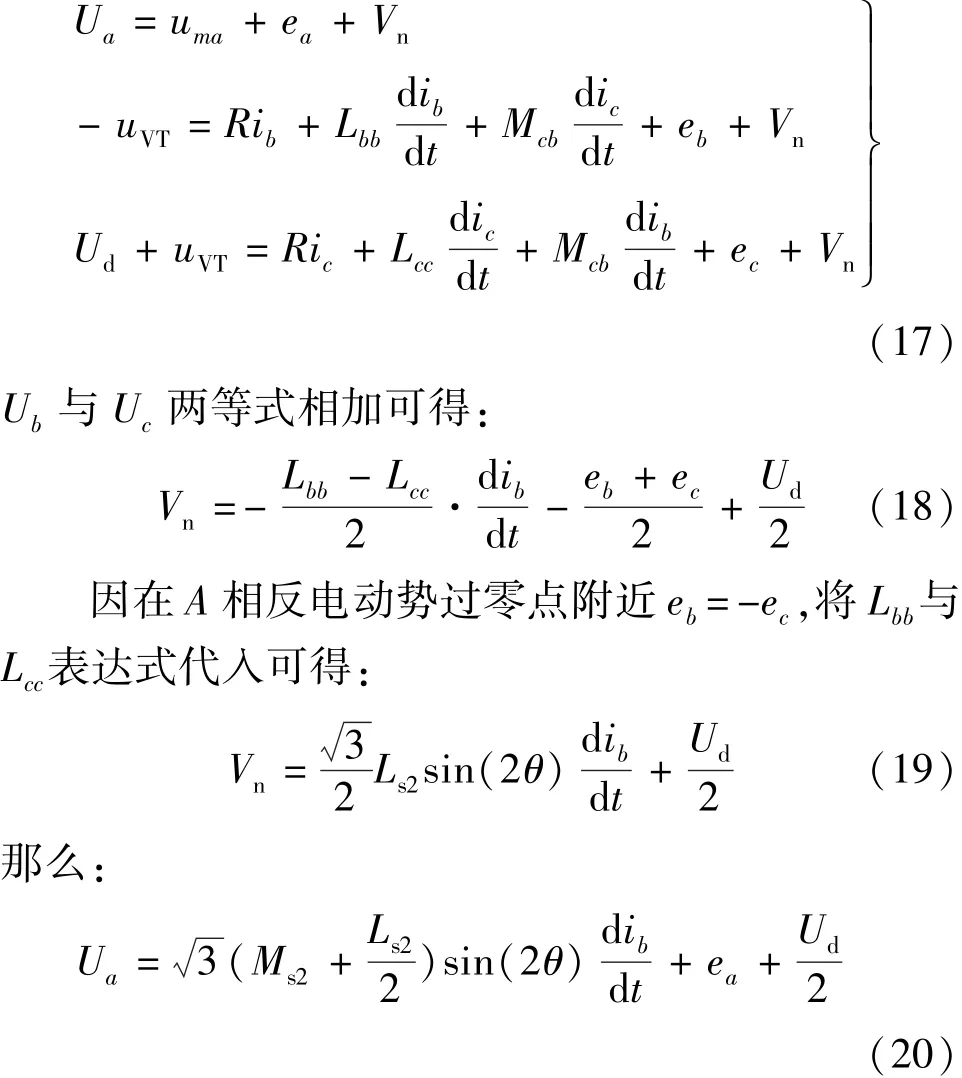
以B,C两相通电,电流由B相流入C相,A相悬空为例,可知ia=0,ib=-ic,此时的电机瞬态模型:
2 通电两相在悬空相的感应电压与悬空相反电动势关系
由文献[8]可知,定子的自感系数和互感系数与转子位置角度存在函数关系。自感系数与转子位置角度的函数关系:
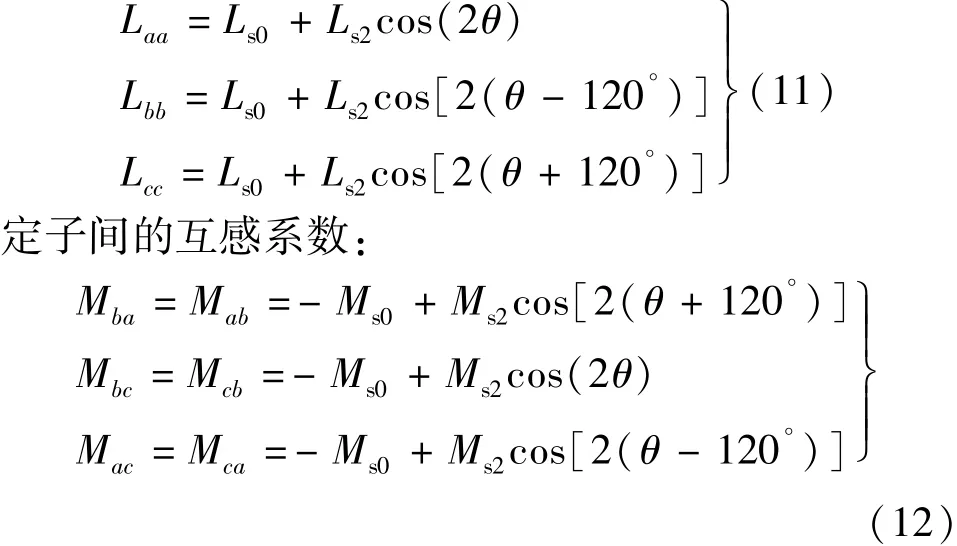
当采用二二导通方式驱动电机时,以电机顺时针运行为例,结合图2可知,转子角度变化范围为-π/6~π/6,从图2中可看出,此时电流由B相流入C
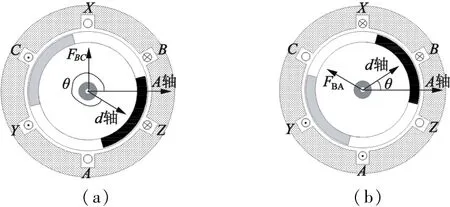
图2 BC相导通始末位置状态图
相,A相为悬空相,可知:

由图2(a)中电机运行状态可知,此时A相的感应电压是由导通相电流引起,即ib与ic对A相的作用,则:可得转子在各运行期间悬空相感应电压表达式,如表1所示(
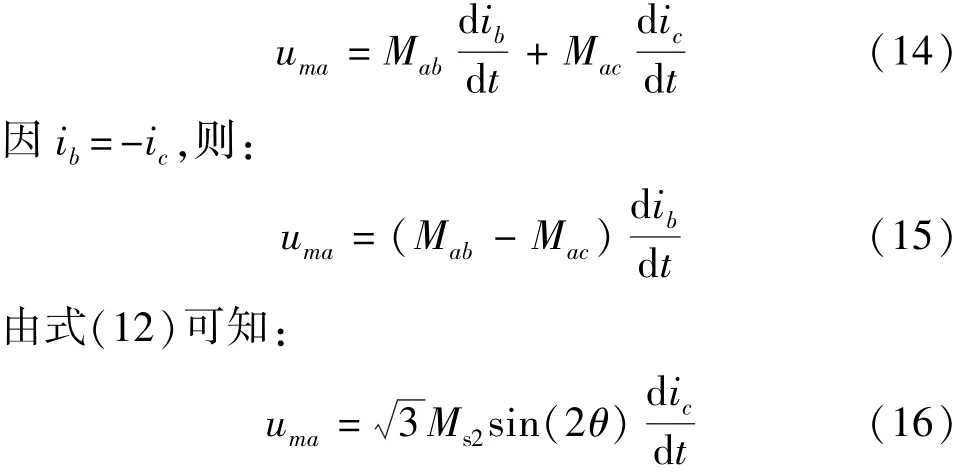
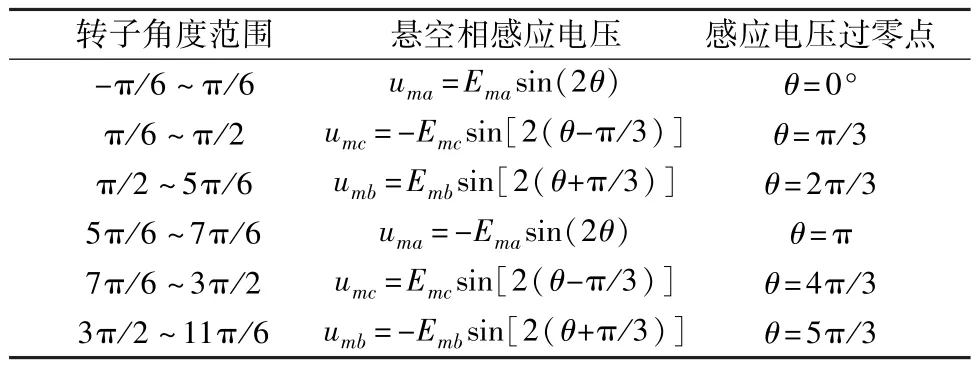
表1 悬空相感应电压方程及其过零点
由式(5)、式(6)和式(7)可得悬空相反电动势在转子各角度范围内的过零点,如表2所示。
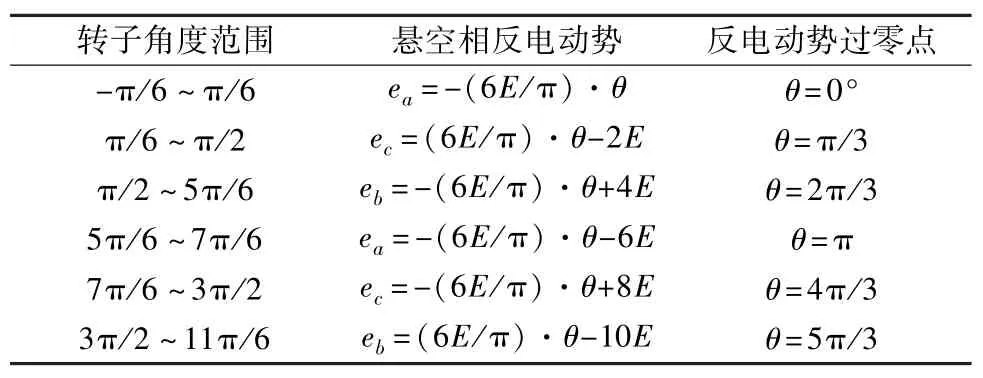
表2 悬空相反电动势方程及其过零点
当功率管导通时,即PWM(ON)阶段,电机在起动过程中,电流的变化趋势为逐渐变大,其变化率为正值()。 由表1和表2中的信息可知,定子悬空相的感应电压和反电动势的过零点相同。两者的过零点方向如表3所示。
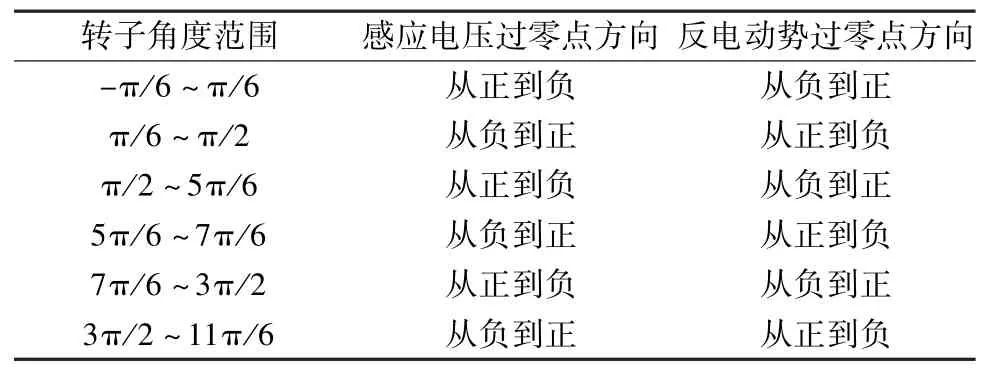
表3 功率管导通时悬空相感应电压与反电动势过零点方向
当功率管续流时,即PWM(OFF)阶段,电机通电相断开,此时电流值逐渐减小(),此时定子悬空相的感应电压和反电动势的过零点方向,如表4所示。
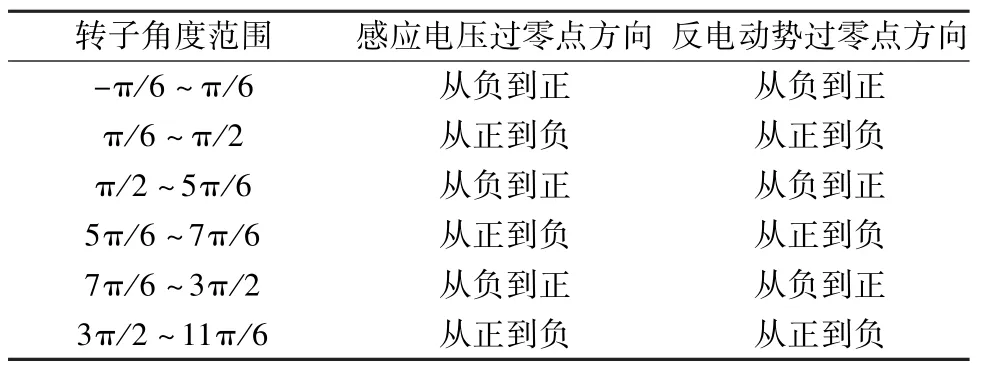
表4 功率管关断续流时悬空相感应电压与反电动势过零点方向
由上述分析可知,定子悬空相的感应电压和反电动势的过零点相同。但当功率管导通时,两者的过零点方向相反;当功率管关断续流时,两者的过零点方向相同。
本文利用MATLAB的Simulink将上述函数关系式进行仿真。以功率管续流时PWM(OFF)为例,为简化分析,令Emk,E为一定值,且数量级基本相等。可得悬空相感应电压和反电动势波形如图3所示(功率管续流时,悬空相感应电压与此时相反)。
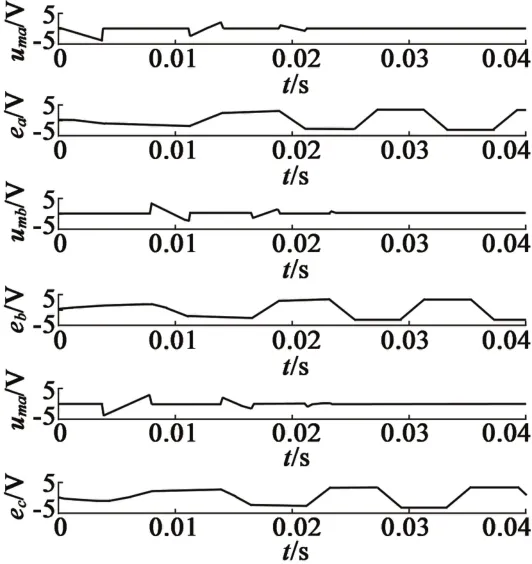
图3 悬空相感应电压与反电动势波形
当采用PWM(ON)时对悬空相过零点进行检测,悬空相的感应电压和反电动势过零点方向相反,当转速较低时,因悬空相的感应电压远远大于悬空相反电动势,此时不会对过零点造成太大影响;但随转速逐渐升高,悬空相的感应电压和反电动势电压数量级达到基本相同时,会造成多个过零点现象,影响对过零点的检测。多个过零点时的仿真图形如图4所示。当采用PWM(OFF)时,对悬空相过零点进行检测,悬空相的感应电压和反电动势过零点方向相同,不会造成多个过零点现象,其仿真图形如图5所示。
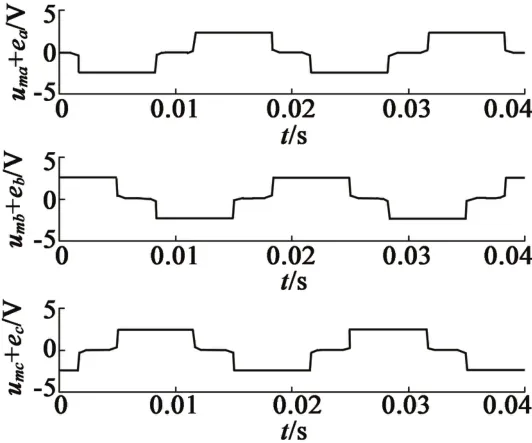
图4 功率管导通时,悬空相感应电压与反电动势叠加图形
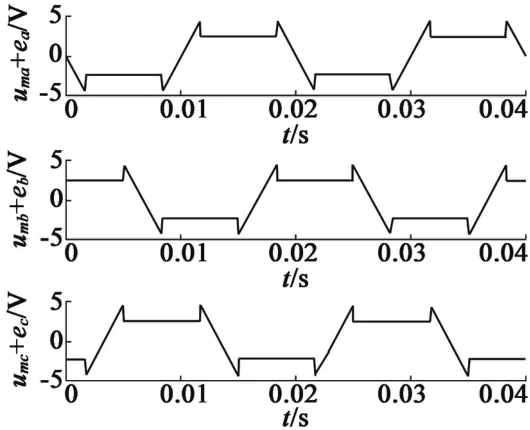
图5 功率管关断续流时,悬空相感应电压与反电动势叠加图形
采用PWM(OFF)时对悬空相过零点检测,若电机达到指定转速,转速变化平稳,则电流变化率减小,悬空相感应电压逐渐变为0,悬空相的过零点主要为反电动势的过零点,在此时可切换为反电动势检测法控制电机运行;同时在PWM(OFF)阶段的悬空相感应电压过零点检测方法,可实现电机低转速的过零检测,因此选用在功率管关断续流阶段,即PWM(OFF)时对定子悬空相的感应电压的过零点进行检测,可实现电机的起动。
3 悬空相感应电压测量法对中性点电压的影响
本文选定Hpwm_Lpwm的控制方式作为电机控制方法。采用该方式时,电机的中性点电位稳定;在电机换相过程中,悬空相无电流续流过程;在功率管开关瞬态时,不存在谐振现象。所以采用该控制方法不会造成因谐振而引起得电机反电动势过零点偏移问题,同时该控制方法有利于对电机悬空相反电动势的检测,能够更加准确地确定转子位置信息[9-10]。根据分析,在起动阶段,选择在 PWM(OFF)阶段对悬空相电压做检测,此时中性点电压Vn=Ud/2,若检测出悬空相电压为Ud/2,则表明悬空相的反电动势过零点。但在实际中,因功率管压降存在差异,电机的绕组电感不能完全对称,都会造成中性点电压的偏移。而中性点电压的偏移会造成悬空相电压过零点超前或滞后,从而导致电机换相过早或者过晚,降低了起动转矩,影响了起动性能,有时甚至导致电机无法起动。
以A相悬空,BC相导通为例,此时悬空相A相电流为零,BC相电流经续流二极管续流(即ia=0,ib=-ic,ib>0),可得此时的电机模型:
由上式可以看出,由于饱和效应引起的电感值随转子位置变化造成的中性点电压偏移,仅是在数值上按倍数增大,并没有造成过零点的超前或滞后问题。同样可以采用检测悬空相端电压与Ud/2比较,确定过零点,因此通过对悬空相端电压的过零点做出检测来确定换相点的方法是可行的。
4 起动方法的提出与优化
根据上述分析结果,在电机起动阶段利用检测悬空相感应电压过零点代替反电动势过零点的检测方法可行,并可通过对电机运行时的悬空相端电压检测过零点实现起动阶段的电机换相。在起动阶段,悬空相反电动势几乎为零,反电动势影响可忽略不计。由悬空相电压公式可得悬空相电压幅值:

可知,悬空相电压的幅值大小与电机的自感和互感系数的二次谐波分量幅值Ls2,Ms2所施加直流电压大小Ud以及通电相电流变化速率的绝对值有关。
实际测量中,在起动阶段初期,悬空相电压的幅值并非很大,同时由于过零检测电路灵敏度的限制,易造成过零点难以检测,因此需要提高起动阶段的悬空相电压幅值大小。但Ls2,Ms2为定值,Ud需要和电机的实际电压参数匹配,因此只有通过改变电流变化速率达到提高悬空相感应电压幅值的目的。
在功率管关断续流过程中,设定子电流的初始值为i0,定子绕组的电感值为L,定子绕组的电阻值为R,那么续流阶段定子绕组电流值[11]可表示:
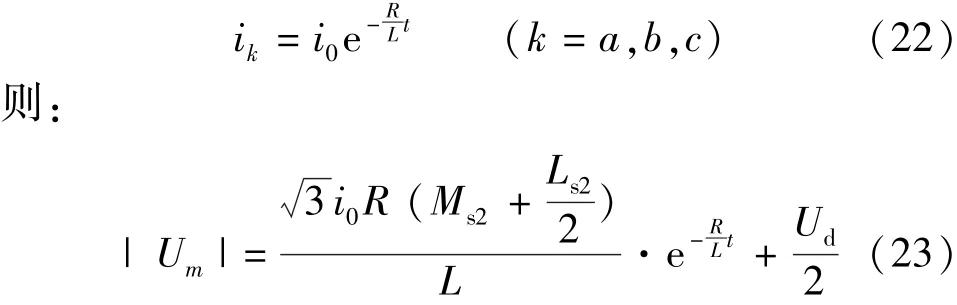
因此,从式(23)可看出,通过减小电机绕组的时间常数,可实现变快续流阶段的电流下降速度,即电流变化速率变大,从而使得悬空相电压幅值增大。但电机绕组的电感不能改变,可通过改变电阻值实现对电机时间常数的调整,即可外接起动电阻,并与电机的三相定子绕组串联实现减小电机时间常数。该起动电阻的阻值大小应该与电机定子绕组的相电阻相等。这样就可增大电流的下降速率,达到提高悬空相电压幅值的目的。当电机转速达到预定值后,切换为反电动势过零检测方法,切除起动电阻,完成电机起动过程。
但需要注意:因外加起动电阻增大,同时也会降低电机的起动力矩;又因起动过程中起动电流下降速度过快,会造成力矩波动增大。应保证悬空相电压过零点可明显测出的同时,尽量保证起动力矩大些,这样可实现电机携带更大负载的起动。
5 起动方法的验证
以42BL-2426W-001型三相星型无刷直流电机为例。电机基本参数:额定电压UN=24 V;额定电流IN=1.8 A;空载电流I0=0.64 A;电机的电阻值R=1.8Ω;电感值(未考虑磁路饱和效应)L=2.59 mH;额定转速nN=4 000 r/min;空载转速n0=5 800 r/min;额定功率为26 W;电机的时间常数约为600μs;该电机的时间反电动势系数为0.012 4 V/(r·min-1)。根据式(10)中的无刷直流电机瞬态模型在Simulink下建立该数学模型[5],如图6所示。该模型中相电感的自感与互感系数是与转子位置变化的函数;采用Hpwm_Lpwm控制方式驱动;在相绕组上串接起动电阻阻值与电机自身相绕组阻值相等,且为1.8 Ω。
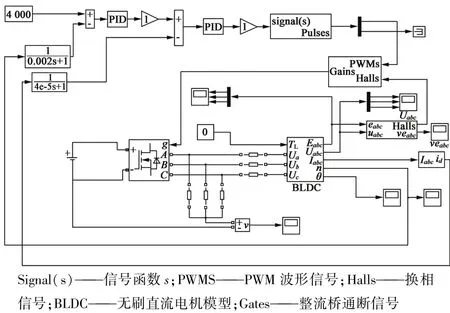
图6 无刷直流电机闭环起动方法Simulink模型
根据图6中的数学模型,对无刷直流电机闭环起动方法进行验证,可得以下仿真波形,如图7~图10所示。
从图7~图9中可知,在起动过程中,电机转速逐渐升高,悬空相的反电动势逐渐增大,同时在起动时,电流变化较快,悬空相的感应电压值较大;当达到0.02 s附近时,转速达到预定值4 000 r/min,电机运行稳定,转速恒定,反电动势变化趋于稳定,而电流变化速率降低,感应电动势变小,几乎为零。从图10中可以看出,采用Hpwm_Lpwm控制方式时,电机的中性点电压不在恒定,为一个在Ud/2附近变化的曲线,但中性点的幅值波动并没有造成过零点的超前或滞后问题。该电机的端电压波形如图11所示。
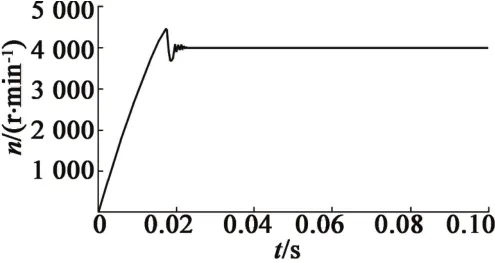
图7 转速波形
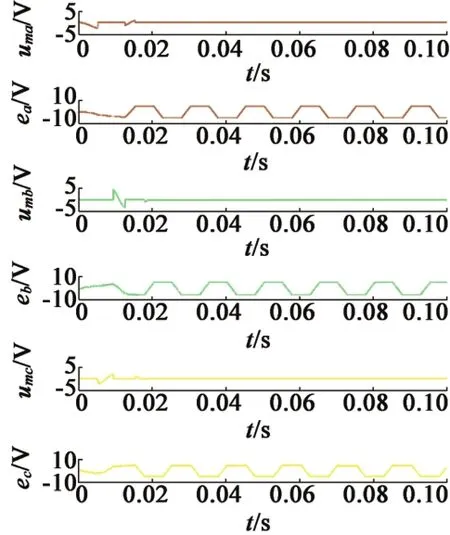
图8 起动过程中感应电动势与反电动势波形
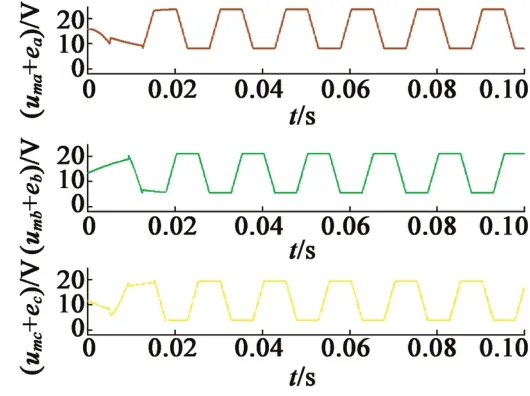
图9 感应电压与反电动势叠加波形
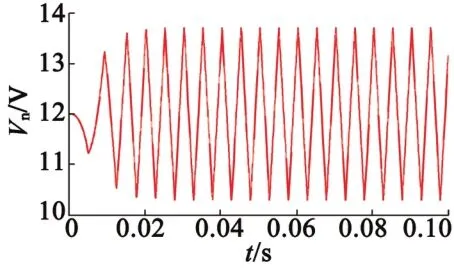
图10 中性点电压波形
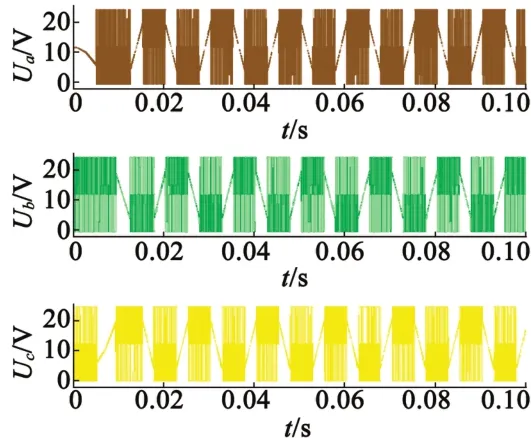
图11 Hpwm_Lpwm控制方式下的电机端电压波形
将图11中的图形局部放大可得图12。从图12(a)中可以发现,电机在起动时刻的第一个过零点并不明显,但该点不会造成起动失步问题;从图12(b)中可知,起动过后出现的电机感应电势过零点十分清晰。
以下是对新型的无刷直流电机闭环起动方法在STM8S无刷直流电机实验平台上的实验验证[12]。整个起动过程包括:转子初始位置检测,转子强制定位,检测悬空相感应电压过零点代替反电动势过零点的起动过程3个阶段。其中转子初始位置检测方法采用施加电压脉冲的电感法[13-14]。在实验过程中,电机选用空载运行状态,设定转速为4 000 r/min,且电机各相定子绕组外接串联起动电阻的阻值大小与电机定子相绕阻值大小相等同为1.8Ω,同时设定电机初始的转子位置位于Ⅰ区域中。
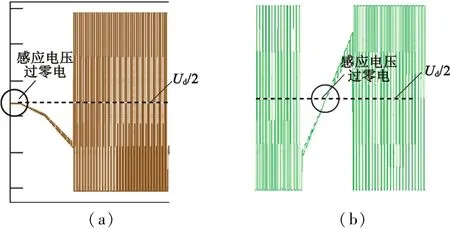
图12 电机端电压局部放大图

图13 无刷直流电动机起动方法试验平台
经该实验平台验证,并由示波器采集起动过程中的母线电流波形、电机运行时刻的端电压波形、电机运行时刻的虚拟中性点电压波形,如图14所示。
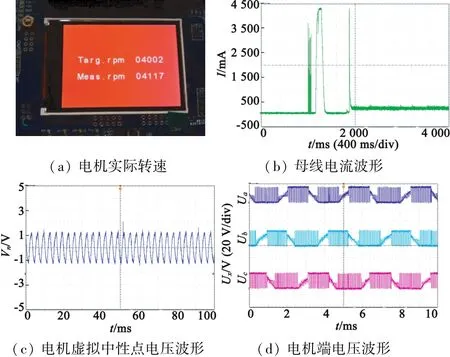
图14 新型起动过程验证实验测试波形
从实验中可知,电机的实际转速为4 117 r/min。从图14(b)中可以看出,电机起动过程中先要检测出转子初始位置,再经0.1 s后施加一个与转子位置相邻的定子磁势令电机转子强制定位,因转动角度最大时仅为30°电角度,故施加定子磁势的时长定为0.2 s。转子强制定位后,再经0.4 s电机进入检测悬空相感应电压过零点代替反电动势过零点的起动过程阶段,从母线电流可以看出,电机起动时刻的电流变化速率很快,且起动电流很高;当电机起动过后,电流迅速下降,电流变化速率降低,电流波动保持稳定。上述实验结论与前文分析一致,因此在起动过程中,电机悬空相的感应电压会很高,且远远大于反电动势。
从图14(c)中可以看出,理论上经分压采集后的电机中性电压为2.16 V,但实际中电机的虚拟中性点电压并不是恒定的数值,这与之前文中分析结论相同。原因在于采用Hpwm_Lpwm控制方式,会造成电机虚拟中性点电压的幅值变化。但该变化并未造成电机悬空相感应电压的过零点的左右偏移。
从图14(d)端电压波形图中可看出,悬空相感应电压的过零点比较明显,并且该方法可完成电机的起动过程。为能体现该起动过程的优越性,本文同样制作了传统的三段式无感起动过程程序与本文方法做对比,该方法的PWM控制方式选用传统的PWM_ON方式驱动,传统的三段式无感起动过程的电机转子强制定位方法以AB相导通时产生的磁势作为强制定位磁势。在该实验中可得到相应的端电压波形如图15所示。

图15 传统三段式无感起动方法的单相端电压波形
将传统无感起动方法与本文的新型无感闭环起动方法对比,因本文的感应电压过零点明显,同时PWM高频干扰噪声得到削弱,所以电机的换相点时刻确定较为准确,起动过程中电机振动较小。因此该新型起动方法摆脱了传统无感起动方法中的不足之处,同时兼具了电机起动稳定的优势,相比传统无感起动方法而言,更具有实用价值和发展优势。
6 结 语
综上所述,利用悬空相的感应电压在启动阶段远大于反电动势,且二者过零点相同的原理,可实现无刷直流电机的在起动过程中对转子位置的检测,确定过零点信息,实现闭环起动。最后,并对该方法提出改进,增大了电机启动过程中感应电压的幅值大小,同时选择对相电压之和的过零点检测代替分别对各相电压的过零检测,使得被测电压幅值增大,过零点更为明显,对无刷直流电机的无感控制方法的研究与应用具有深远意义。
[1]丘东元,许树源,张波.检测电感电流预测电感电压的非线性处理方法[J].中国电机工程学报,2004,24(8):78-82.
[2]年珩,贺益康,黄雷.永磁同步电机无位置传感器运行场路耦合分析[J].中国电机工程学报,2008,28(18):104-109.
[3]顾绳谷.电机与拖动基础[M].北京:机械工业出版社2007.
[4]STEPHEN D.UMANS,Electirc Machinery[M].Seventh Edition.Beijing:Publishing House of Electronics Industry,2014.
[5]黄守道,邓建国,罗德荣.电机瞬态过程分析的MATLAB建模与仿真[M].北京:电子工业出版社,2013:215-217.
[6]钟继隆,周苏,王明强.考虑磁路饱和效应的无刷直流电机电感参数研究[J].佳木斯大学学报,2014.3,32(2):176-186.
[7]汤蕴璆,史乃.电机学[M].2版.北京:机械工业出版社,2007.
[8]任雷,崔芮华,王宗培.永磁同步电机绕组电感的饱和效应[D].电工技术学报,2000,15(1):21-25.
[9]胡庆波,郑继文,吕征宇.混合动力中无刷直流电机反接制动PWM调制方法的研究[J].中国电机工程学报,2007,27(30):87-91.
[10]宋飞,周波,吴小婧.校正无位置传感器无刷直流电机位置信号相位的闭环控制策略[J].中国电机工程学报,2009,29(12):52-57.
[11]邱关源.电路[M].5版.北京:高等教育出版社,2005.
[12]李家庆,李芳,叶文.无刷直流电机控制应用--基于STM8S系列单片机[M].北京:北京航空航天大学出版社,2014:1-11,367-368.
[13]LAI Y S,LIN Y K.Assessment pulse-width modulation techniques for brushless dcmotor drives[J].IEEE Industry Applications Magazine,2008,14(5):34-44.
[14]WOOK-JIN L,SEUNG-KI S.A new starting method of BLDC motorswithout position sensor[J].IEEE Transactions on Industry Applications,2004(4):2397-2402.