基于自抗扰控制的对称六相PMSM与三相PMSM串联系统
2017-05-13刘陵顺韩浩鹏闫红广孔德彪肖支才
刘陵顺,韩浩鹏,闫红广,孔德彪,肖支才
(海军航空工程学院 控制工程系,山东 烟台 264001)
基于自抗扰控制的对称六相PMSM与三相PMSM串联系统
刘陵顺,韩浩鹏,闫红广,孔德彪,肖支才
(海军航空工程学院 控制工程系,山东 烟台 264001)
多台多相电机串联驱动系统可以实现单台逆变器驱动多台电机的独立运行,与传统的多电机变速驱动系统相比有助于节省逆变器的数量和安装空间。多台多相电机串联驱动系统的转速调节多采用经典的PI控制,存在快速性与超调的矛盾,系统抗干扰能力比较弱。以对称六相和三相PMSM双电机串联系统为研究对象,将自抗扰控制(ADRC)应用到该串联系统的转速调节中,搭建起了基于ADRC速度调节器的对称六相和三相PMSM双电机串联驱动系统模型,通过仿真证明了自抗扰控制可以实现对转速的快速无超调跟踪,并提高系统的鲁棒性。
对称六相PMSM;三相PMSM;双电机串联;自抗扰控制;速度调节器
0 引 言
多电机变速驱动系统在舰船牵引、多电飞机等领域具有理论研究意义和潜在的应用价值。要提高多电机变速驱动系统的性能,需要解决多电机驱动系统中各台电机在同一逆变器供电下能够同时独立运行的问题[1]。根据电机理论,同一个逆变器供电下的多台多相电机可以通过相序转换规则串联起来互不影响、各自运行,有利于节省逆变器桥臂,节约空间,具有明显的优势。永磁同步电机的优良特性使其成为了交流传动系统的重点研究内容,将永磁同步电机应用到多台多相电机串联驱动系统中可以提高系统的效率和性能。
永磁同步电机是一个非线性、强耦合的系统,实际应用过程中存在着未知负载等干扰,然而多相电机串联驱动系统的转速调节目前都采用经典的PI调节。PI控制器的结构会导致过程控制的初始时刻系统存在快速性和超调的矛盾,抗干扰能力比较差,这种线性控制器难以满足高控制性能的要求。韩京清教授提出的自抗扰控制保留了PID控制“基于误差消除误差”的优势,吸取了现代信号处理技术的优秀成果、开发了非线性效应来消除PID控制的缺点[2]。
本文以对称六相和三相PMSM双电机串联驱动系统为研究对象,将ADRC应用到该串联系统,在分析ADRC原理的基础上得到了基于ADRC的速度调节器。在MATLAB/simulink环境下搭建起了基于ADRC速度调节器的对称六相和三相PMSM双电机串联系统模型,通过与经典PI控制的对比,证明了基于ADRC的速度调节器可以消除系统快速性和超调的矛盾,提高系统的抗干扰能力。
1 对称六相和三相PMSM双电机串联原理
根据电机原理,对多相电机的磁通和转矩的控制只需要通过控制α-β平面的两个电流分量即可,与其他平面的电流分量无关,这样其他平面的电流分量就成为了自由电流分量。多余的自由电流分量可以将一定数量的多相电机串联起来。然而,要对串联电机进行独立解耦控制,需将电机的定子绕组通过适当的相序转换串联在一起[3]。
对称六相和三相PMSM双电机串联图如图1所示,由六相逆变器输出的电流经过空间解耦变换后,投影到三个相互正交的子平面中(α-β平面、x-y平面和o1-o2平面)[4]。α-β平面的电流分量用来控制对称六相PMSM,x-y平面的电流分量控制三相PMSM,对称六相PMSM和三相PMSM的定子绕组通过适当的相序转换连接到一起,这就实现了两台电机在同一逆变器下的独立解耦控制。

图1 对称六相和三相PMSM双电机串联图
2 ADRC原理
自抗扰控制器是由非线性跟踪-微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈(NLSEF)这三部分组成,自抗扰控制器的一般结构如图2所示。图中v(t)为控制目标;vi(i=1,2,...,n)为非线性跟踪-微分器输出的过渡过程及其各阶导数;zi和zn+1分别为扩张状态观测器输出的对象状态和扩张状态;ei为对象跟踪控制目标的状态误差;非线性状态误差反馈“非线性组合”这些误差得到u0;u为对象控制量;y为对象输出。

图2 ADRC一般结构
总的来说,扩张状态观测器实时估计系统扰动并前馈补偿,将非线性不确定系统确定化和线性化为简单的积分串联型;非线性状态误差反馈为积分串联系统设计出了理想控制器;非线性跟踪-微分器可以安排输入信号的过渡过程,同时给出很好的微分信号,缓解了快速性和超调的矛盾。另外,非线性状态误差反馈的非线性基本消除了静态误差,避免了积分环节的副作用[5-7]。
3 基于ADRC的速度调节器
面装式永磁同步电机的运动方程为:

(1)


(2)
3.1 基于ADRC的速度调节器数学模型
通过式(2)可以看出永磁同步电机的运动方程是一阶的,所以根据自抗扰控制的原理,非线性跟踪-微分器设计为一阶,扩张状态观测器为二阶。
(3)
扩张状态观测器的输入为为电机实际转速ωr,设计ESO的数学模型为:
(4)
状态误差e1=v1-z1,设计非线性状态误差反馈的数学模型为:
u0(t)=β1fal(e1,α3,δ1)
(5)
3.2 基于ADRC速度调节器的串联系统

图3 ADRC速度调节器结构图
将基于ADRC的速度调节器取代传统基于PI控制的速度调节器,得到了基于ADRC速度调节器的串联系统结构如图4所示。

图4 基于ADRC速度调节器的串联系统结构
4 仿真结果及分析
根据基于ADRC速度调节器的串联系统结构图,在MATLAB/simulink环境下搭建出仿真模型,通过仿真验证了基于ADRC速度调节器的串联系统的控制性能,并且和传统的PI控制进行了对比。对系统仿真参数设定如下:直流电压Udc=300 V;电机参数:R=rs1+rs2=2.875 Ω,L1=8.5 mH,L2=12 mH,ψf1=0.175 Wb,ψf2=0.2 Wb,p1=p2=6;运动参数:J1=0.089 kg·m2,J2=0.1 kg·m2,F1=0.005,F2=0.01。
串联电机解耦控制的具体表现:电机转速的变化不会对串联电机的转速和转矩产生任何影响;电机的转矩变化不会对串联电机的转矩和转速产生任何影响。
变载仿真:对称六相PMSM负载转矩为3 N·m、转速为100 r/min,三相PMSM空载、转速为150 r/min,在0.5 s对称六相PMSM负载转矩变为5 N·m、在0.8 s对称六相PMSM负载转矩变为3 N·m。两台电机的工作状态如图5所示。
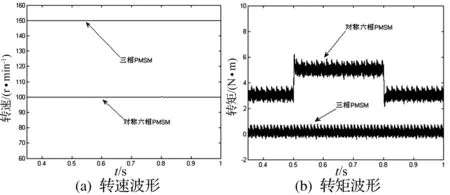
图5 变载时系统工作状态
变速仿真:三相PMSM空载、转速为100 r/min,对称六相PMSM负载转矩为3 N·m、转速为150 r/min,在0.6 s三相PMSM加速到200 r/min、在1 s三相PMSM减速到50 r/min。两台电机的工作状况如图6所示。

图6 变速时系统工作状态
以上变速和变载仿真表明,ADRC控制技术可以实现在对称六相串联三相PMSM双电机串联系统的应用,基于ADRC速度调节器的串联系统可以实现在同一逆变器下串联电机的解耦控制,即两台电机的独立运行。
ADRC和PI控制对比仿真:下面将以串联系统中的三相PMSM为研究对象,分别基于ADRC速度调节器和PI速度调节器对三相PMSM的电机转速进行仿真,通过对比分析两种速度调节器的控制性能,证明ADRC的优越性。
仿真1:三相PMSM空载转速设定为50 r/min,在0.5 s负载转矩变为5 N·m,仿真结果如图7所示。

图7 转速50 r/min时波形
仿真2:三相PMSM空载转速设定为400 r/min,在1.1 s负载转矩变为5 N·m,仿真结果如图8所示。

图8 转速为400 r/min时波形
通过不同转速情况下负载突变的转速波形对比可以看出:基于PI速度调节器下,电机的动态响应快,但存在超调,当负载转矩突变时,转速变化幅度大且再次达到稳定所需时间长;基于ADRC速度调节器下,电机不存在超调,这是因为非线性跟踪-微分器合理安排过渡过程,当负载转矩突变时扩张状态观测器实时估计出扰动并通过前馈补偿,转速得到快速调节,很快就达到了稳定,系统的抗干扰能力增强。
5 结束语
本文将自抗扰控制应用到对称六相和三相PMSM双电机串联驱动系统中,在分析自抗扰控制原理的基础上设计了基于ADRC的速度调节器,在MATLAB/simulink环境下搭建起基于ADRC速度调节器的对称六相和三相PMSM双电机串联驱动系统。仿真表明,基于ADRC速度调节器的对称六相和三相PMSM双电机串联驱动系统可以实现同一逆变器驱动两台电机的独立控制;通过和传统PI速度调节器对比,ADRC速度调节器有效消除了超调,提高了系统的抗干扰能力。
[1] LEVI E, JONES M, VUKOSAVIC S N, et al. Operating principles of a novel multiphase multimotor vector-controlled drive[J]. IEEE Transactions on Energy Conversion, 2004, 19(3):508-517.
[2] 韩京清. 自抗扰控制技术[J]. 前沿科学,2007,1(1):24-31.
[3] LEVI M, JONES S N, VUKOSAVIC,et al. Toliyat, A novel concept of a multiphase, multi-motor vector controlled drive system supplied from a single voltage source inverter[J], IEEE Trans. Power Electr,2004,19:320-335.
[4] 刘陵顺,张海洋,苗正戈. SVPWM控制2台双Y移30°PMSM串联系统研究[J]. 电气传动,2012,42(8):39-42.
[5] 韩京清,王伟. 非线性跟踪-微分器[J]. 系统科学与数学,1994,14(2):177-183.
[6] 韩京清,袁露林. 跟踪-微分器的离散形式[J]. 系统科学与数学,1999,14(增刊):557-560.
[7] 韩京清. 非线性状态误差反馈控制律-NLSEF[J]. 控制与决策,1995,10(3):221-225.
A Series Connected System of the Symmetrical Six-phase PMSM and Three-phase PMSM Based on Active Disturbance Rejection Control
Liu Lingshun, Han Haopeng, Yan Hongguang, Kong Debiao, Xiao Zhicai
(Department of Control Engineering, Naval Aeronautical University, Yantai Shandong 264001, China)
The multiphase multi-motor series-connected drive system can realize independent operation in which a single inverter drives several motors, and requires less quantity and installation space of inverters as compared with the traditional multi-motor variable speed drive system. Speed regulation of the multiphase multi-motor series-connected drive system normally adopts classical PI control, there is contradiction between rapidity and overshooting, and the system anti-interference remains weak. In this paper, with the symmetrical six-phase and three-phase PMSM two-motor series-connected system as research objects, active disturbance rejection control (ADRC) is applied to the speed control of the series-connected system. A model of the symmetrical six-phase and three-phase PMSM two-motor series-connected system is established on the basis of the ADRC speed regulator. Simulation results verify that the ADRC strategy can realize quick speed tracking without overshooting and improve the robustness of the system.
symmetric six-phase PMSM; three-phase PMSM; two-motor series connection;active distribution rejection control (ADRC) ; speed regulator
国家自然科学基金项目资助(51377168)
10.3969/j.issn.1000-3886.2017.01.012
TM351
A
1000-3886(2017)01-0038-03
刘陵顺(1969-),男,山东枣庄人,教授,博导,主要研究方向:电机及控制。
定稿日期: 2016-07-28
