车门锁系统耐惯性性能设计与计算解析
2017-05-13金云光丁光学朱伟
金云光,丁光学,朱伟
(安徽江淮汽车集团股份有限公司,安徽 合肥 230601)
车门锁系统耐惯性性能设计与计算解析
金云光,丁光学,朱伟
(安徽江淮汽车集团股份有限公司,安徽 合肥 230601)
文章解析通过车门锁系统开启的动作和力学(力矩)传递过程,详细阐述了车门锁系统耐惯性加速度的计算原理和方法;建立了车门锁系统耐惯性性能计算模型,在该计算模型中,可基于耐惯性加速度指标进行参数化驱动正向设计。
车门锁系统;耐惯性力;力学传递;计算模型
CLC NO.:U463.5 Document Code: A Article ID: 1671-7988 (2017)08-123-04
引言
车门锁系统是汽车车门一个重要的部件,安全性能是车门锁系统一项最基本性能要求,即保证汽车在受到侧碰或一定的惯性加速度下,车门不被意外开启,保障车内人员的安全。
如何通过布置、设计和参数的定义,满足耐惯性性能要求,避免车门不被打开,保障车内人员的安全,已成为车门外把手设计开发过程的一个重要的课题。
本文根据车门锁系统结构和开启过程,建立了车门锁系统安全性能计算分析模型,在设计阶段布置设计和参数定义,确保该系统耐惯性性能。
1、车门外把手及锁系统
如图1,车门锁系统包括锁体总成、内外开拉杆拉丝、内外把手总成等。
门锁系统开启过程为,在解锁止状态下,拉动把手拉手,通过拉杆,带动锁体外开摇臂,促使锁体内锁舌转动,脱离锁扣,完成车门的开启。
对车门外把手的侧碰性能的开发就是通过布置、设计、计算,确保汽车在受到侧碰或一定的惯性加速度的作用时。阻止上述开锁动作的传递,避免车门门锁开启。
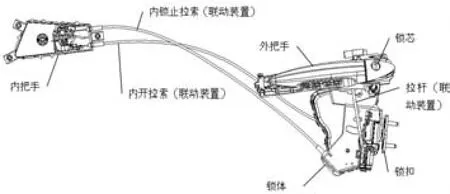
图1 车门锁系统示意图
2、性能要求
1)门锁系统应满足下述惯性载荷要求中a的动态要求,或者满足b的计算要求。
a对车门门锁系统,在解锁情况下,以纵向或横向分别施加30 g 的惯性载荷,不应从全锁紧位置脱开。
b每个部件和子系统可以通过计算求出在特定方向上的最小耐惯性载荷。阻止开锁的组合耐惯性载荷,应保证门锁系统在正确安装到车门上,承受上述a规定的惯性载荷时,保持在锁紧位置。
2)实际耐惯性载荷要求
实际情况,为了充分保证门锁系统的安全要求,会提升车门锁系统耐惯性载荷要求;一般按以下要求执行:门锁处于全锁紧位置时,在任何方向上均能承受加速60g,作用时间30ms的惯性负荷,并能保持全锁紧位置。
注:文中的“n”均为重力加速度的倍数。
3、原理解析
如图2,车门外把手主要包括把手手柄、把手基座,外把手基座上配有联轴器,其包含配重块、扭簧等。通过车门外把手开锁过程为:手动拉动车门外把手手柄、把手手柄绕其轴线A-B旋转运动、通过手柄挂钩拉动把手基座联轴器(D点为作用位置)、把手基座联轴器绕其轴线E-F旋转运动,通过联轴器上外开拉杆安装孔带动外开拉杆向下运动(H点为作用位置)、外开拉杆带动车门锁体上的外开摆臂绕其轴线作旋转运动,当车门锁体外开摆臂绕其轴线运动达到车门锁体有效开启行程,车门锁体锁扣啮合则会开启。
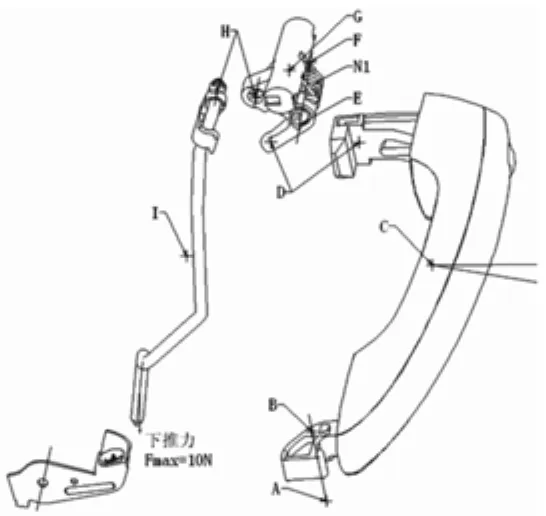
图2 车门锁开启过程示意图
汽车在受到侧碰或惯性载荷作用时,车门外把手、把手基座联轴器、外开拉杆均会产生惯性力,上述惯性力中有利于车门锁开启方向的惯性力、也有不利于车门锁开启方向的惯性力,其差值产生的力矩等于或大于车门锁开启的阻力产生的力矩(包括车门锁体外开摆臂解锁力、把手弹簧的扭力力矩、摩擦力),车门锁体则会开启的风险。
(1)外开摆臂受力分析
当外开拉杆下压外开摆臂达一定值时,开启臂突破锁机构翻转点,锁被开启。设计计算时将车门锁体外开摆臂开启力F1作为开启条件建立计算关系。
(2)外开拉杆受力分析外开拉杆受力分析详见图3。

图3 车门外开拉杆受力平衡示意图
a 外开拉杆的重力作用
车门外开拉杆上端固定在联轴器上,下端与锁外开摆臂接触,因碰撞惯性载荷作用时,为了充分保证车门把手的侧碰性能,一般取外开拉杆对外开摆臂的最大作用力,即其全部重力:m3g。
b 外开拉杆对外开摆臂惯性力
外开锁杆一半质量产生的惯性力作用在外开臂上,如图4,J1J是平行于Y轴的碰撞方向,过J作外开摆臂旋转轴线MN的法平面π11交MN于J0,J1J是J2J在平面π11上的投影,∠J1JJ2=α6,∠J0JJ2=α7,产生有效惯性力为:m3*g*n*CONα6*tgα7/2;J2J0∥J4J,J5J是重力的铅垂方向,J4J是有效惯性力方向,∠J4JJ5=α8。
外开拉杆对外开摆臂惯性力为:

当J点在旋转轴上方,产生的是阻止开启的力矩,使联轴器下压力加大,否则相反。
c结论
综上,根据作用力的传递计算,车门锁开启的条件为,联轴器对外开拉杆向下作用力须达到F2限值。

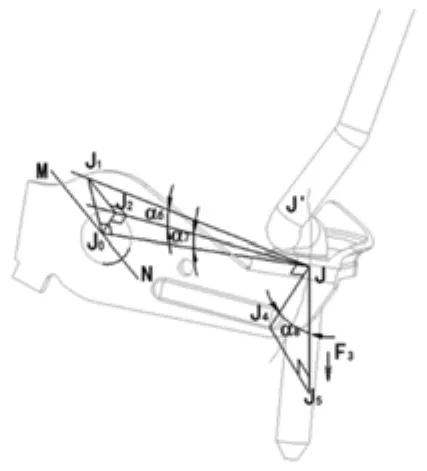
图4 车门外开拉杆与外开摆臂作用示意图
如图5,HH1是过H点的铅垂线,过H作直线EF的法平面π1交EF于H0,过H、E、F三点作平面π2,过H作平面π2法线HH2,∠H1HH2=α1。过H0作H0H3⊥H3H2,∠H3HH0=α2。H0H3是有效转矩的力臂:HH0*SINα2。
外开拉杆对联轴器的有效反作用力:

有效转矩的力臂:H0H3。
碰撞车门开启时,联轴器对外开拉杆的输出力矩须达到:


图5 车门外开拉杆与联轴器作用示意图
(3)联轴器的受力分析
a 外开拉杆惯性力矩
如图6,外开锁杆一半质量产生的惯性力作用在联轴器上,HH4是过H点的平行于Y轴的直线;过H作直线EF的法平面π1交EF于H0,H5是H4在平面π1上投影,∠H4HH5=α10,∠H5HH0=α11,过H0作H0H6⊥H5H交H5H于H5。
在水平方向锁杆产生的惯性力:m3*g*n/2 在EF旋转方向锁杆产生的有效惯性力:

在EF旋转方向锁杆产生的有效惯性力臂:

锁杆另一半惯性力作用在联轴器上的碰撞惯性力矩:

当H点在旋转轴之上时,产生的是阻止开启的力矩,否则相反。
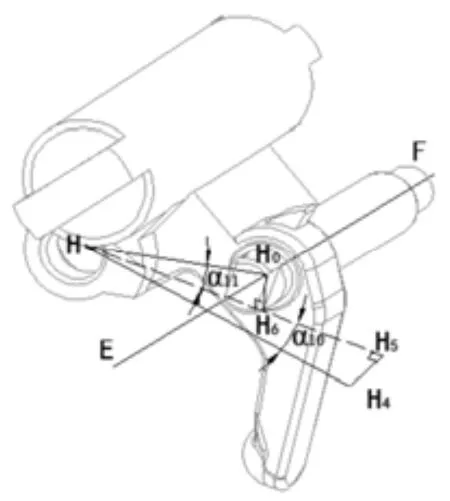
图6 车门外开拉杆对联轴器惯性作用示意图
b 联轴器惯性力
如图7,GG4是过G点的平行于Y轴的直线;过G作直线EF的法平面π3交EF于G0,G5是G4在平面π3上投影,∠G4GG5=α12,∠G5GG0=α13,过G0作G0G6⊥G5G交G5G于G5。
在水平方向联轴器产生的惯性力:m2*g*n
在EF旋转方向联轴器产生的有效惯性力:

在EF旋转方向联轴器产生的有效惯性力臂:

联轴器惯性力矩:

当G点在旋转轴之上时,产生的是阻止开启的力矩,否则相反。
c联轴器旋转时的摩擦阻力力矩
联轴器旋转时阻力矩在输入时定义为A4,是一个具体值。
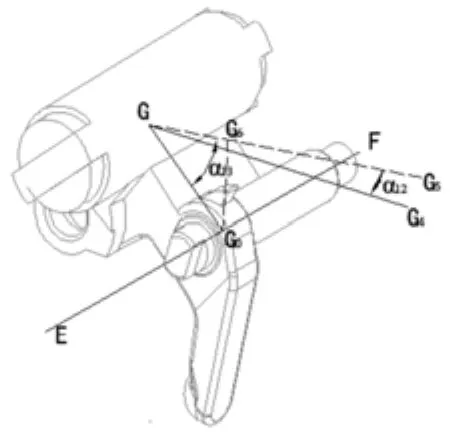
图7 联轴器惯性力示意图
d扭簧的阻力矩
扭簧的阻力矩定义为A5,它在工作过程中按一定规律变化,是一个规律变化值。
e 把手手柄对联轴器的作用力矩
如图8,D是联轴器球头球心,D在直线EF的投影D3,过D、E、F三点做平面π4,过D作π4的法线DD1,DD1是联轴器旋转力有效作用方向;D3D把手手柄作用联轴器的有效力臂。
过D、A、B三点做平面π5,该平面方程通过D、A、B三点坐标求得,过D作平面π6的法线DD2,DD2是把手柄旋转力的有效作用方向。
当把手柄的旋转作用力为F4时,则联轴器获得把手柄传来的有效力矩:

对于联轴器,车门开启力矩条件为:

对于联轴器,综上,可计算出车门开启力条件:

(4)把手柄的受力分析
a 把手柄的重力
如图9,CC1是过C点的铅垂线,过C作直线AB的法平面π7交AB于C0,过C作A、B、C三点的法平面π8,过C作C2C垂直于π8,则C2C为把手柄重力产生转矩有效力方向,∠CC1C2=α。
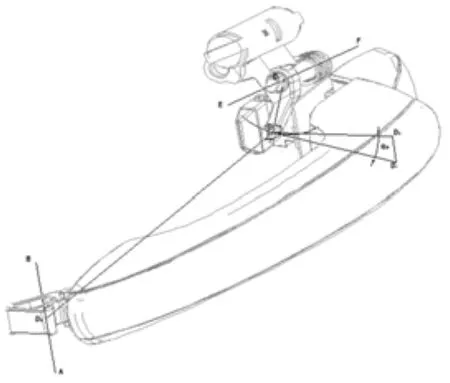
图8 外开手柄与联轴器作用示意图
CC1是把手柄重力方向,CC2是作用在以AB为旋转轴上的有效旋转力方向,C0C是有效旋转力的力臂。
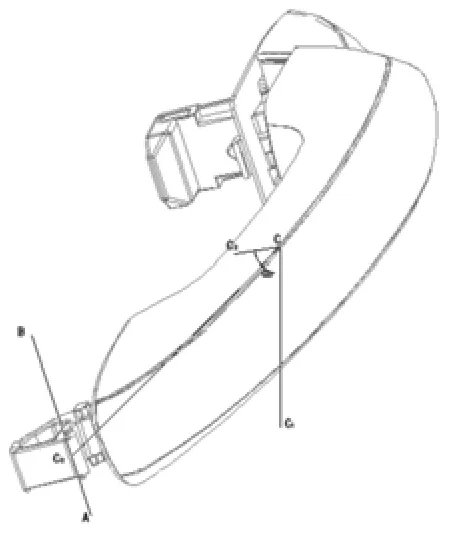
图9 车门外开手柄重力作用示意图
把手手柄作用在以AB为旋转轴上的有效重力矩:

内倾是负值,外倾是正值。
b把手柄惯性力
如图10,CC4是过C点的平行于Y轴的直线;过C作直线AB的法平面π13交AB于C0,过A、B、C三点做平面π14,过C点做CC5垂直于平面π14,∠C4CC5=α14。

图10 车门外开手柄惯性作用示意图
在水平方向把手柄产生的惯性力:m1*g*n
在AB旋转方向把手柄产生的有效惯性力:

在AB旋转方向把手柄产生的有效惯性力臂:CC0
把手柄惯性力矩:

c把手柄旋转时的摩擦阻力
把手柄旋转时阻力矩在输入时定义为A9,是一个具体值。
对于车门外把手手柄,设联轴器对外开手柄的反作用力F4的力臂为L,则车门开启的力矩条件为:

4、计算模型建立
依据上述原理解析,可建立车门锁系统耐惯性力的计算模型,输入相应的几何尺寸参数、门锁体的解锁力、扭簧的扭矩、影响零部件重量、摩擦力矩,可精确地计算车门锁系统耐惯性加速度。
在设计阶段,可基于车门锁系统耐惯性加速度性能指标对模型上几何参数变量(结构尺寸)和物理参数变量(解锁力、弹簧扭矩等)进行布置设计和设定,做到车门锁系统耐惯性性能的参数化驱动的正向设计。
5、结束语
安全性能是汽车最基本性能要求,耐惯性力要求是车门锁系统一项安全性能要求。本文解析通过车门锁系统开启的动作过程和力学(力矩)传递,详细阐述了车门锁系统耐惯性加速度的计算原理和方法;建立了其计算模型,在模型中,可基于耐惯性加速度指标进行参数化驱动正向设计;将性能指标(耐惯性加速度)的开发工作真正提前到设计阶段,具有广泛的推广意义。
[1] 黄金陵.汽车车身设计.机械工业出版设计.2007.
[2] 周旭坤.汽车门锁系统的设计基础.兵器工业出版设计.2015.
The Design and calculation of inertia for latch system of automobile
Jin Yunguang, Ding Guangxue, Zhu Wei
( Anhui jianghuai automobile Co., LTD., Anhui Hefei 230601 )
In this paper, the transfer of force and torque and procedure of latch system is pointed, the calculation of inertia is specified; the formula to calculate the inertia of latch system is established; in the formula, the inertia can be parametric developed.
latch system of door; resistance of inertia; transfer of force and torque; formula to calculate
U463.5
A
1671-7988 (2017)08-123-04
金云光,就职于安徽江淮汽车集团股份有限公司。
10.16638/j.cnki.1671-7988.2017.08.042
