2016年款五门版路虎极光车载数据总线传输信息解析
2017-05-13马福萍
马福萍
(杭州技师学院,浙江 杭州 311500)
2016年款五门版路虎极光车载数据总线传输信息解析
马福萍
(杭州技师学院,浙江 杭州 311500)
数据总线传输系统具有成本低、布线简化、控制单元之间信息共享、传感器数目相应减少、提高汽车运行可靠性的优点。2016年款五门版路虎极光(Ranger Rover Evoque/L538)的数据总线使用了3种网络系统:CAN网络系统、LIN系统、MOST系统。CAN网络系统又分为高速CAN动力传动系统、高速CAN底盘系统、中速CAN车身系统、中速CAN舒适便利系统。本文根据电路图绘制出数据总线结构图、各个CAN网络系统图、MOST系统框架图、LIN系统框架图,并对这些网络数据总线传输信息进行解析。
1 数据总线结构图
图1为2016年款五门版路虎极光数据总线概图。通过该图可清晰辨别出网关、中央接线盒、诊断接口、动力系统、舒适系统、车身系统、底盘系统、LIN系统、BCM车身控制模块之间的连接关系。
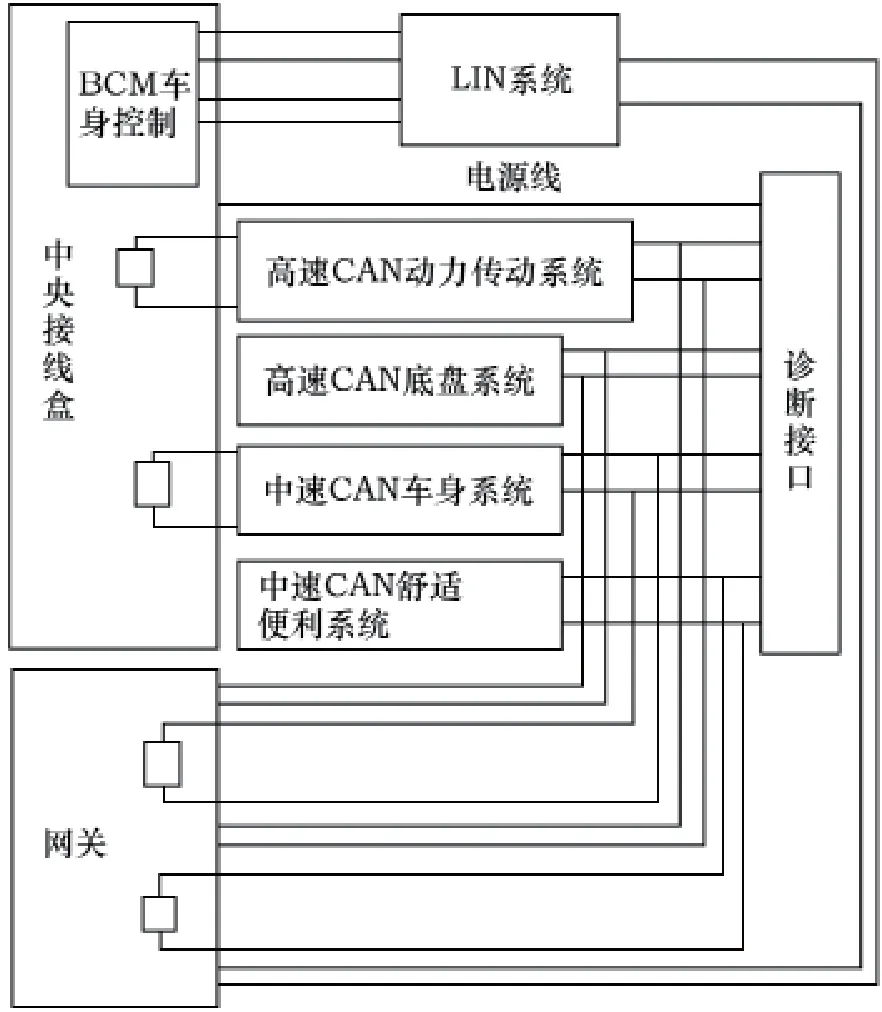
图1 2016年款五门版路虎极光数据总线概图
2 CAN网络数据总线系统
CAN网络数据总线系统是高速广播网,CAN网络中的所有控制模块都可以传送信息。CAN网络系统的传输介质是双绞线,一根是CAN_H(CAN高) 线,一根是CAN_L(CAN低)线,网络中的所有信息都由这2条数据线传输。这2根传输线的电压差就是CAN网络上传输的信息。本文介绍的这辆车使用了4个CAN 网络系统,中速车身、舒适系统和高速底盘、动力传动系统,这4个CAN网络系统利用网关进行信息转换。
2.1 高速CAN动力传动系统
高速CAN动力传动系统信息传输速度为520 kB/s,图2为该系统框图。在CAN网络中的所有控制模块都是利用网络中传输的各种信息来控制执行器等工作的。喷油量信息是由发动机控制模块发送的,车轮转速是由防抱死制动模块发送的,这些信息是很多其他控制模块都需要的。发送信息的控制模块采用广播式向总线发送,若在同一时间有多个控制单元向总线发送信息,总线会发生数据冲突,CAN网络协议利用标识符进行数据优先权仲裁,如表1所示,喷油量信号具有最高优先级,因为这个信号直接关系到发动机的性能。喷油量信号由发动机控制模块发送,其他控制单元都可以接收到该信号,控制模块需要该信息就接受,不需要就忽略。比如变速器控制单元可以利用喷油量等信息来控制换挡,自适应速度控制模块可以利用喷油量等信息来改变速度。
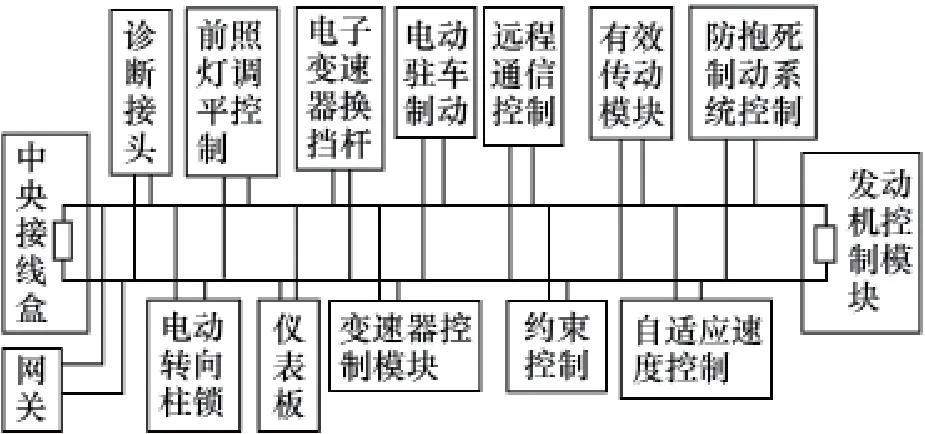
图2 高速CAN动力传动系统
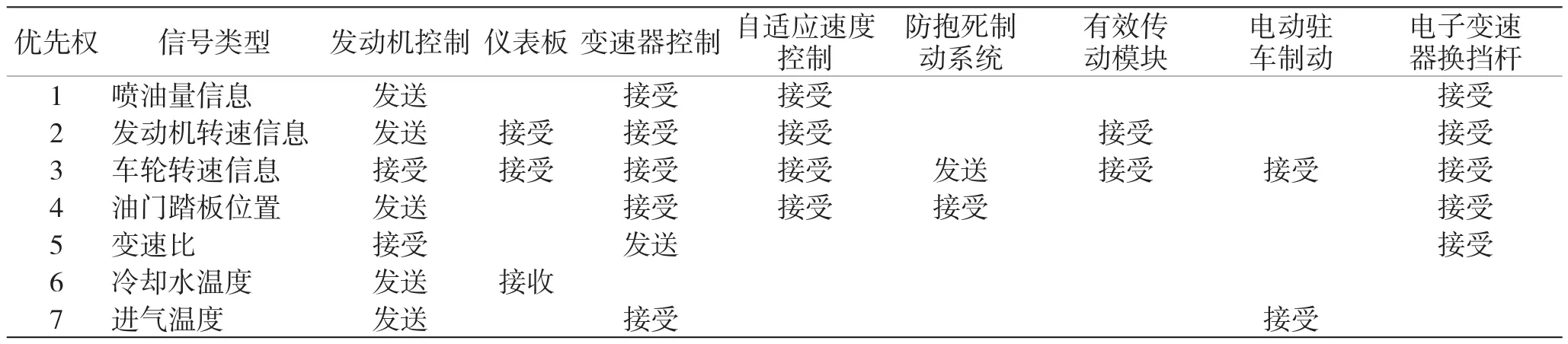
表1 高速CAN动力传动系统信息
2.2 高速CAN底盘系统
高速CAN底盘系统信息传输速度为500 kB/s。高速CAN底盘系统如图3所示,信号传递表见表2。例如,驻车信号由驻车辅助控制模块发送到CAN网络中,所有控制模块都可以接收到该信息,但是只有需要该信息的模块会接受该信息,例如集成制动控制模块可以利用驻车信息进行车辆制动。
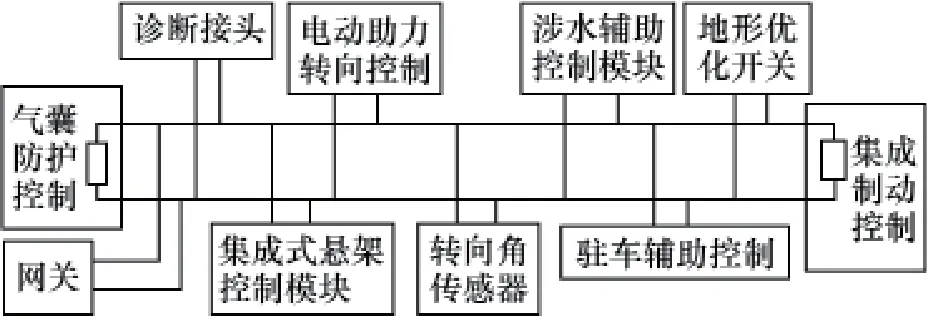
图3 高速CAN底盘系统
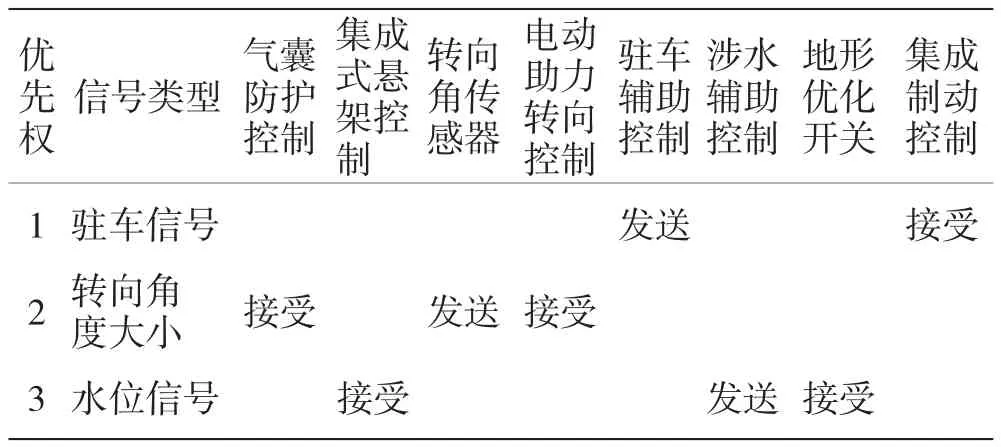
表2 高速CAN底盘系统信息
2.3 中速CAN车身系统
中速CAN车身系统信息传输速度为125 kB/s。图4为中速CAN车身系统。表3为该系统信息传送表,例如驾驶员开关状态信息由驾驶员车门模块发送,乘客车门模块可以利用该信息控制乘客车窗。
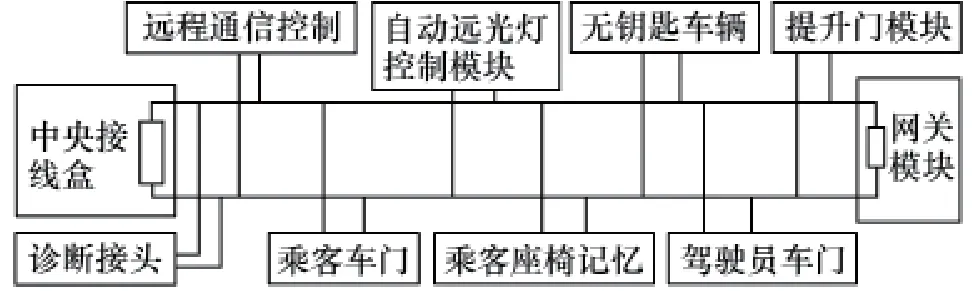
图4 中速CAN车身系统
表3 中速CAN车身系统信息
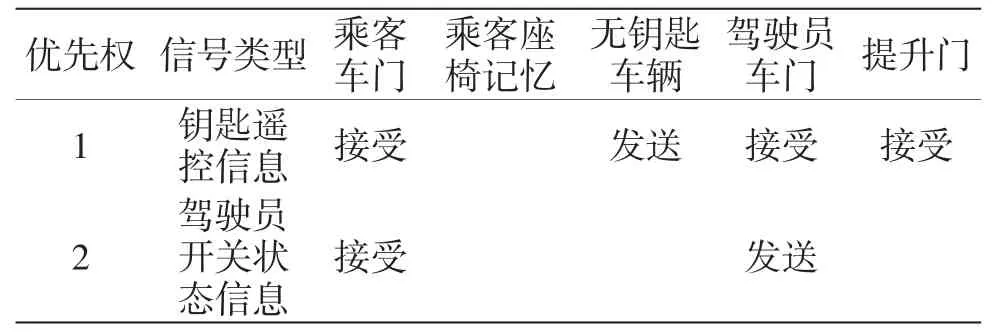
优先权 信号类型 乘客车门乘客座椅记忆无钥匙车辆驾驶员车门 提升门1 钥匙遥控信息 接受 发送 接受 接受2驾驶员开关状态信息接受 发送
2.4 中速CAN舒适便利系统
中速CAN舒适系统速度为125 kB/s,图5为该系统框架图。表4为该系统信息传送表,例如后视镜摄像头发送信息,多功能显示屏可以接收该信息并显示盲点情况。
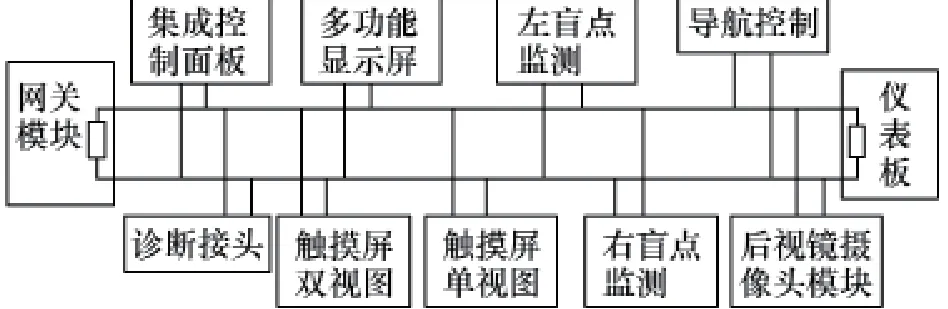
图5 中速CAN舒适便利系统
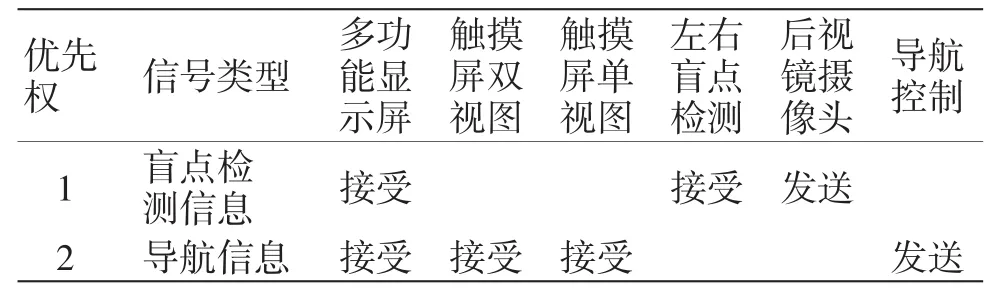
表4 中速CAN舒适系统信息
3 MOST总线系统
媒体导向系统运送(MOST)环使用光缆在信息和娱乐系统中传输数据和音响信号。在环上排列光缆时,环上的每条光缆都具有“向内MOST”和“向外MOST”连接。MOST环是同步网络。时序主控部件提供时钟,环上所有其他部件的运行与该时钟同步。汽车上使用的MOST系统经常采用环形布局,最多可以有64个节点。2016年款五门版路虎极光连接有7个节点,汽车接通电源,网络中所有节点就全部激活。MOST系统是一点对多点的数据流系统,触摸屏是主节点,其他节点是从节点。主节点是系统状态的管理中心和注册中心,主节点还可以罗列出网络中的所有功能和这些功能块所属的每个设备的地址。如图6所示。
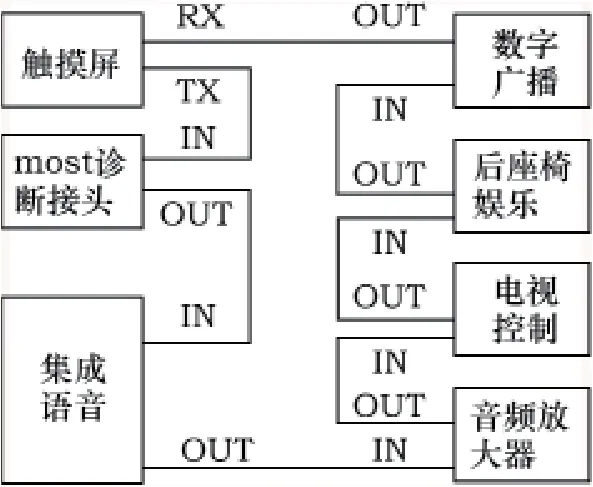
图6 MOST总线系统
4 LIN总线系统
LIN 总线是一种使用主从组件的低速广播网。主组件通过单线向从组件传送消息,用来识别将作出响应的从组件。该消息含标题(从标识符)和空数据字段。已识别的从组件将相关信息填入数据字段,并通过同一根单线将消息返回主组件。几种LIN总线系统如图7所示。如图7a所示,车身模块就是一个主组件,雨水光线传感器就是一个从组件,车身模块单线向雨水光线传感器发送请求信息,该信息含从组件(雨水光线传感器)的标识符和空数据字段,从组件(雨水光线传感器)将相关信息填入数据字段,并通过同一根LIN线将信息反馈给主组件(车身模块)。
5 小结
本文清晰描绘2016年款五门版路虎极光网关、中央接线盒、诊断接口、动力系统、舒适系统、车身系统、底盘系统、LIN系统之间的连接关系,并罗列高速CAN动力传动系统、高速CAN底盘系统、中速CAN车身系统、中速CAN舒适便利系统、MOST系统、LIN系统中传输的主要信息。根据这几个车载网络协议说明信息的传输机制。本文描绘出的该车的网络框图具有直观性,主要信息的传输机制有利于更好地理解车载网络协议,可供学习车载网络使用。
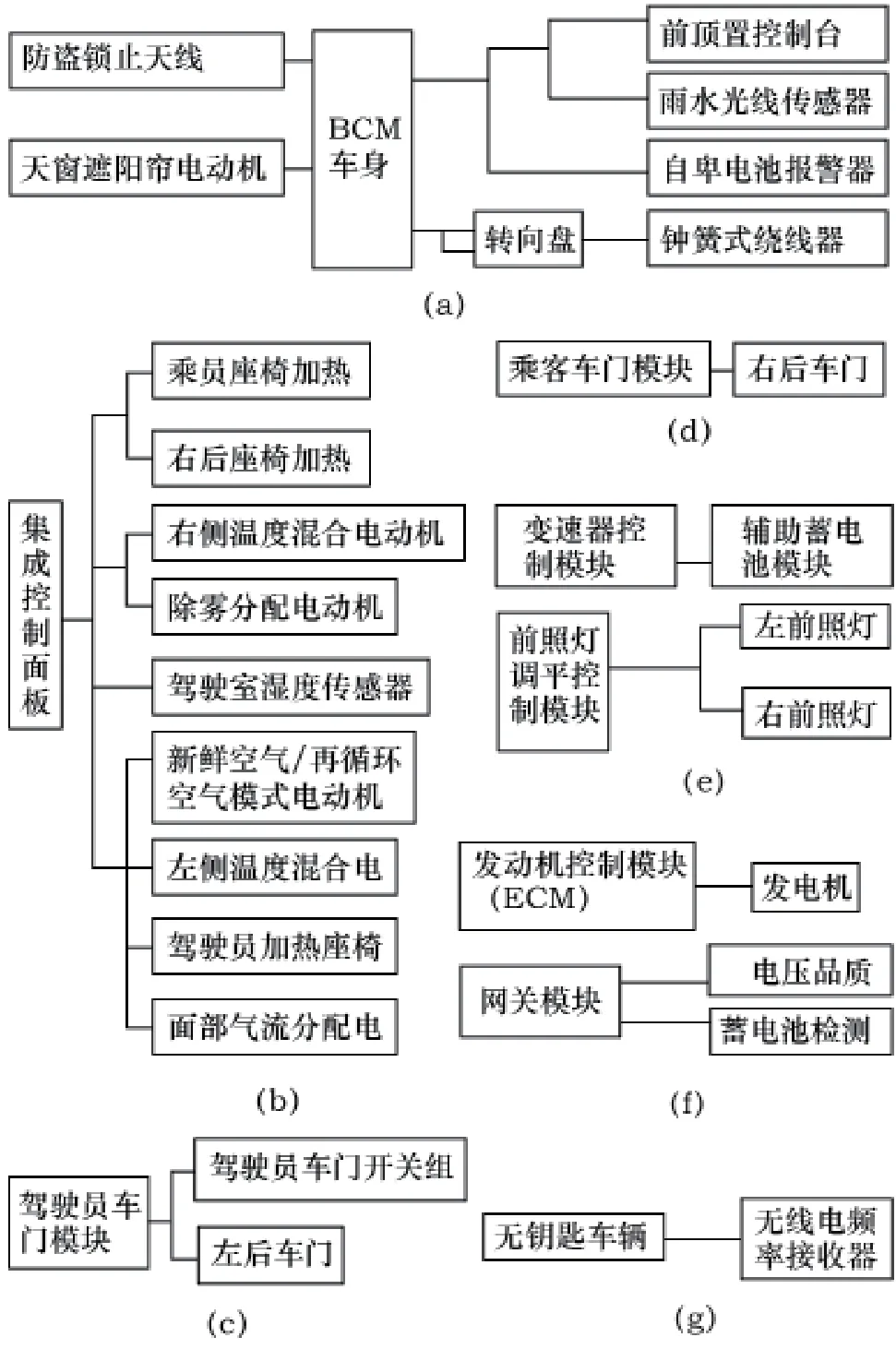
图7 LIN总线系统
[1] 宋炯,杨维和.车载网络系统原理与检修[M].昆明:云南人民出版社,2012.
[2] Andreas Grzemba.MOST汽车多媒体网络[M].秦贵和,黄永平,等,译.北京:北京理工大学出版社,2010.
[3] 吴海东.汽车车载网络技术与检修[M]. 北京:北京理工大学出版社,2010.
[4] 吴文琳,吴丽霞.汽车车载网络系统原理与维修精华[M].北京:机械工业出版社,2008.
(编辑 杨 景)
U463.6
B
1003-8639(2017)04-0042-03
