基于小波和粒子群算法的HEV行驶状况辨识方法研究
2017-05-11郭海龙张永栋张胜宾
郭海龙, 张永栋, 张胜宾
(1. 广东交通职业技术学院汽车与工程机械学院, 广东 广州 510650;2. 华南理工大学机械与汽车工程学院, 广东 广州 510641)
基于小波和粒子群算法的HEV行驶状况辨识方法研究
郭海龙1,2, 张永栋1,2, 张胜宾1
(1. 广东交通职业技术学院汽车与工程机械学院, 广东 广州 510650;2. 华南理工大学机械与汽车工程学院, 广东 广州 510641)
针对混合动力汽车(HEV)行驶状况(道路坡度和整车载荷)变化难以有效识别,导致驱动系统控制策略不能有效满足驾驶员意图问题,以混联式HEV为研究对象,提出了基于小波滤波和粒子群算法的HEV行驶状况辨识方法。首先建立了汽车行驶状况辨识模型,采用最小二乘法确立了优化目标函数,其次研究了基于小波滤波和粒子群算法的HEV行驶状况辨识原理,最后进行了行驶状况粒子群智能算法辨识试验。在采集实车数据的基础上,对实车数据进行小波滤波,并运用行驶状况辨识方法对道路坡度和整车载荷进行了辨识,并对辨识结果进行小波滤波,结果表明,试验工况下整车载荷辨识的相对误差绝对平均值为2.71%,道路坡度辨识的相对误差绝对平均值为3.85%,验证了所提出方法的有效性。
混合动力汽车; 最小二乘法; 粒子群算法; 小波滤波; 辨识
混合动力电动汽车(HEV)整车动力性、经济性、续驶里程较传统汽车和电动汽车都有很大优势[1-2]。整车驱动系统控制策略是HEV核心技术之一。当行驶状况(如道路坡度和整车载荷等)发生改变时,整车速度和加速度将会发生相应变化,车辆行驶将会偏离驾驶员意图,这会迫使驾驶员频繁踩踏加速踏板,以期望HEV能够在现有行驶状况下遵循驾驶员意图行驶。此过程HEV将会不断加速、减速和制动,导致整车能耗增加、乘员舒适性下降。因此,有效辨识行驶状况对于制定合适的整车控制策略、降低能耗、保证乘员舒适性具有很大意义。针对该问题国内外学者也进行了大量理论和试验研究,如新加坡学者Wilhelm Erik将福特轻型纯电动货车作为研究对象,研究了汽车质量的实时估计方法[3]。同济大学的余卓平等针对4个轮毂电机驱动的电动汽车质量估算方法进行了研究[4]。相关研究主要集中在变速器换挡规律、车辆纵向控制、巡航控制、辅助制动和牵引控制等方面[5]。对于行驶状况辨识的研究,主要集中在传统重型汽车[6-7],部分集中在纯电动汽车方面[3-4],鲜有研究出现在混合动力电动汽车方面;从研究目的来看,主要集中在自动变速器换挡策略、动力学控制、GPS导航方面,极少将其应用在HEV的驾驶人需求扭矩意图辨识或驱动系统控制策略方面;从辨识方法来看,大多是车辆载荷[3-4,8-9]或道路坡度[6,10-11]独立辨识,而没有将二者有效结合起来。因此,本研究以混联式HEV为研究对象,研究了HEV的坡度和载荷动态辨识方法,目的是在行驶状况变化的情况下,通过该方法辨识出行驶状况,为制定符合驾驶员意图的驱动系统控制策略提供基础,进而达到降低整车能耗、提高乘员舒适性的目的。
1 行驶状况粒子群智能算法辨识机理研究
1.1 混联式HEV的结构参数
本研究以混联式HEV为研究对象,其动力总成结构见图1。其中电动机MG2与齿圈相连接,发电机MG1与太阳轮连接,发动机与行星架连接。该动力耦合机构的动力输出部件为齿圈,齿圈又进一步通过链传动将动力传递到中间轴,中间轴通过主、从动齿轮将动力传递至主减速器,主减速器的主、从动齿轮将动力降速增扭后传递到差速器,差速器最终通过行星齿轮和半轴齿轮带动左右驱动车轮。表1示出了该混联式HEV整车及动力学相关主要参数。

1—电动机MG2; 2—行星齿轮齿圈; 3—行星架; 4—太阳轮; 5—传动链主动轮; 6—传动链从动轮; 7—发电机MG1; 8—发动机; 9—中间轴主动齿轮; 10—中间轴从动齿轮; 11—主减速器主动齿轮; 12—主减速器从动齿轮; 13—差速器; 14—半轴; 15—驱动轮图1 行星齿轮式混联HEV动力总成结构
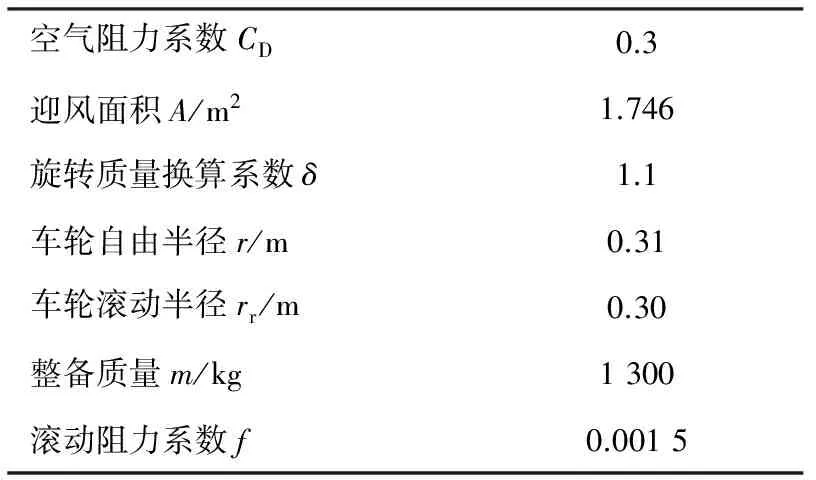
空气阻力系数CD0.3迎风面积A/m21.746旋转质量换算系数δ1.1车轮自由半径r/m0.31车轮滚动半径rr/m0.30整备质量m/kg1300滚动阻力系数f0.0015
1.2 汽车行驶状况辨识模型
由汽车行驶纵向动力学原理,可得当前t时刻汽车行驶微分方程为[12]
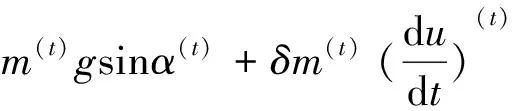
(1)

(2)

由式(1)可知,在驱动力、车速、加速度已知的前提下,该式存在两个自由变量,即m和α,求解该变量有两个方程即可,即可以利用t-1,t-2时刻的方程来求解m和α。
考虑汽车行驶过程中,若仅用两个时刻的数据来计算m和α会出现较大误差,因此,采用当前时刻以前的i个历史时刻数据点来解m和α的计算方程,由此该问题便成为一个超定超越方程组的求解问题,方程组矩阵见式(3):
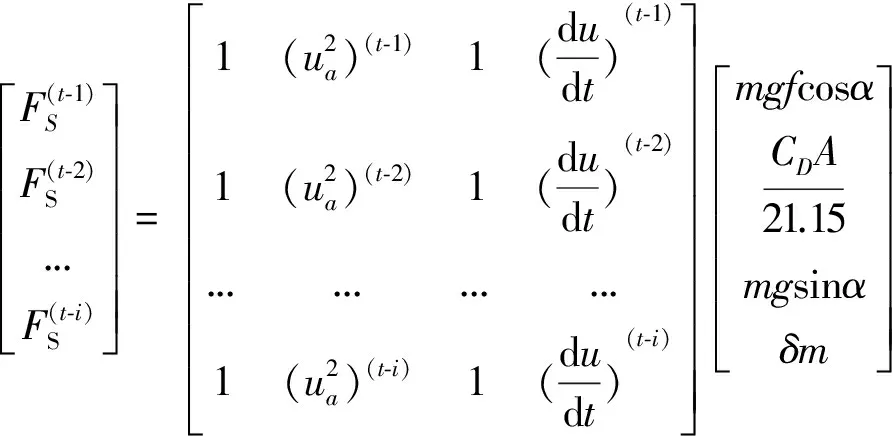
(3)
(4)
根据最小二乘原理,对下式优化目标函数进行最小寻优:

(5)
2 小波优化算法及行驶状况粒子群求解原理
近年来,小波理论快速发展,而且由于其具备良好的时频特性,因而实际应用也非常广泛,应用小波进行滤波也获得了非常好的效果。粒子群算法是一种基于模拟动物的社会行为和自适应特征的以种群为基础的优化方法[13],由于其具有很高的效率,并且能够在科学和工程领域中寻找全局最优解,因此在科学和工程领域中的应用越来越受到人们的关注[13-15],并形成了多种算法形式[16-19]。综上所述,本研究选取小波滤波算法和经典基本粒子群算法来进行整车载荷和道路坡度优化求解。
2.1 小波滤波原理
车辆行驶过程中,由于路面不平造成汽车零部件之间的撞击、振动以及车厢内部乘员的活动等引起的噪声都会直接干扰有效信号的测量,其中噪声处于高频段,有用信号处于低频段。假设观测到的一维信号有如下形式:

(6)
式中:s(t)表示真实信号;n(t)表示噪声。
一般情况下,在含噪信号中,信号有较低的频率和较稳定的波形,而噪声频率较高且没有规律。含噪信号中的噪声会影响对信号的辨识和处理,加大辨识难度甚至影响处理结果,因而,滤波就显得尤为重要。本研究使用软阈值对所获取的数据进行滤波处理。

(7)
结合车辆测试数据特点,可根据实际滤波效果确定分解层数,并选定启发式阈值选择原则。此外,由于汽车速度信号对小波基的对称性要求不是很高,因此可以采用近似对称的小波基,乘法门限调整有3种,分别是“one”,“sln”和“mln”,优先使用“one”,效果不理想的情况下,可以用另外两个参数优化滤波结果。
2.2 小波滤波效果
基于小波滤波原理,本研究选择道路坡度0.089 8 rad(5.145°)、实车质量1 596 kg (载荷ml=296 kg),乘员为5人进行滤波效果的试验。车速数据滤波的效果对比见图2。车辆驱动力数据滤波的效果对比见图3。
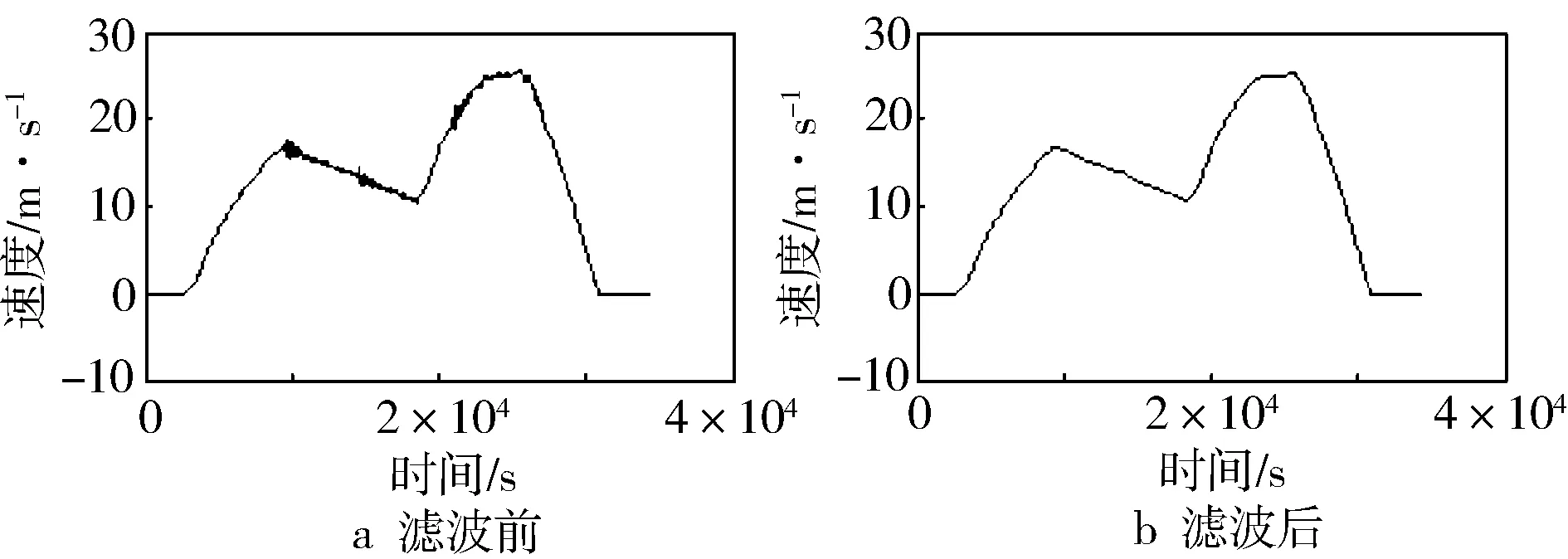
图2 车速数据滤波效果的对比
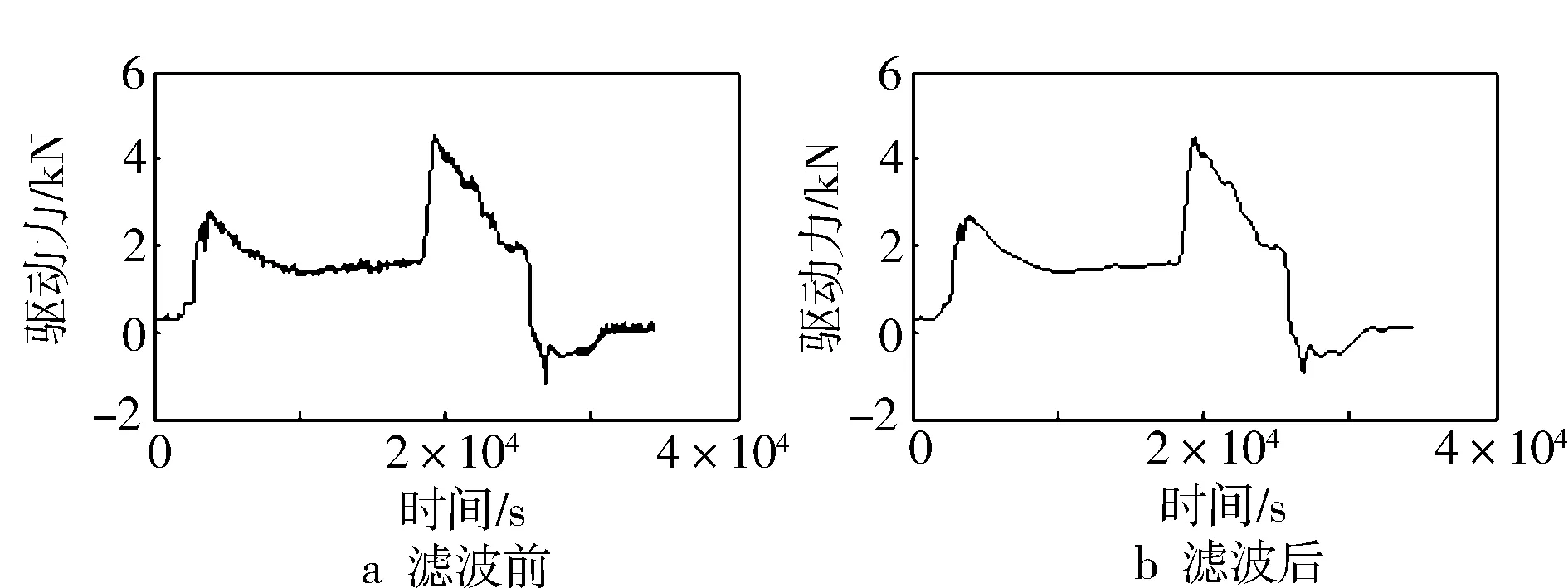
图3 车辆驱动力数据滤波效果的对比
将图2与图3左右两图进行对比可以看出,经过小波滤波之后,一方面,原始图像中的绝大部分毛刺都已经去掉,另一方面,原始图像的走势保留得比较完好,说明小波滤波可以达到较好的效果。两者的小波滤波参数对比见表2。

表2 不同条件下的小波滤波参数对比
通过表2可以发现,针对车速和驱动力滤波,条件的选择并不相同,不同的数据有其自身的特点,需针对不同的特点选择合适的滤波方法,从而达到较好的滤波效果。
2.3 基本粒子群算法原理
基本PSO算法将每个个体看作是一个粒子,该粒子没有体积和质量,并在n维搜索空间中以一定速度飞行,飞行过程也就是寻优的过程,其飞行速度由个体经验和群体经验进行动态调整[20]。
结合本研究中整车载荷m和道路坡度α寻优需要,设Xi=(mi,αi)为微粒i的载荷和坡度当前优化值;Vi=(vim,viα)为微粒i的载荷和坡度更新速度;Pi=(pim,piα)为微粒i的载荷和坡度最优适应值的位置。

(8)
设寻优群体中的粒子为s个,所有粒子的全局最优位置为Pg(t),则:

(9)
由上,基本PSO算法的进化方程可描述为
vim(t+1)=vim(t)+c1r1m(t)[pim(t)-mi(t)]+
c2r2m[pgm(t)-mi(t)]。
(10)
viα(t+1)=viα(t)+c1r1α(t)[piα(t)-αi(t)]+
c2r2α[pgα(t)-αi(t)]。
(11)
mi(t+1)=mi(t)+vim(t+1)αi(t+1)=
αi(t)+viα(t+1)。
(12)
式中:下标“m”表示微粒载荷维;下标“α”表示微粒坡度维;下标“i”表示微粒i;t表示第t代;c1,c2为变速常数,c1∈[0,2],c2∈[0,2];r1~U(0,1),r2~U(0,1)为相互独立的随机函数。由此可知,c1可以改变微粒向自身载荷和坡度最优位置移动的步长,c2可以改变微粒向全局载荷和坡度最优位置移动的步长。为避免微粒飞离搜索空间,vim,viα通常限值如下:
vim∈[-vmmax,vmmax],
viα∈[-vαmax,vαmax]。
由约束函数可知,本研究中载荷m和坡度α的搜索空间为
m∈[mmin,mmax],α∈[αmin,αmax]。
因此,可设定:


基本PSO算法的初始化一般分三步:首先设定群体大小N;然后对任意微粒i在[mmin,mmax]和[αmin,αmax]搜索空间内产生服从均匀分布的mi和αi;最后对任意微粒i在[-vmmax,vmmax]和[-vαmax,vαmax]限值范围内产生服从均匀分布的vim和viα。
3 行驶状况粒子群智能算法辨识实车试验
为了验证上述道路坡度和整车载荷辨识方法的有效性,进行了行驶状况粒子群智能算法辨识试验。
3.1 试验设备及方法
试验设备包括混联式HEV、专用数据流测试仪器IntelligentTester-Ⅱ、笔记本计算机、专用数据处理软件IntelligentViewer、汽车轴重测量试验台、道路坡度测试数字全站仪。IntelligentTester-Ⅱ可以通过车辆诊断专用接口从整车CAN网络获取车辆数据,并将其记录保存在存储设备中,数据采样周期约为51ms,可采集全车各个电控系统部件全部数据。
为检验行驶状况粒子群智能辨识方法的效果,试验中首先测定了试验车的质量、载荷的质量以及道路的坡度,然后试验车以不同载荷和不同加速踏板行程在试验坡道上行驶,同时使用专用设备采集试验数据,并对试验数据进行小波滤波;利用滤波后的数据,运用粒子群辨识方法对试验车的载荷和道路坡度进行辨识,并再次对辨识结果进行小波滤波,最终将滤波后的辨识值与真值进行对比,从而检验辨识方法的效果。因本研究的辨识需要车速等数据,所以需辨识车速大于0的行驶工况。
为充分对行驶状况粒子群智能辨识方法进行验证,设定了如表3所示的试验工况,并针对不同的项目设定了如表4所示的小波滤波参数。
表3 行驶状况辨识试验设定的工况
表4 不同条件下的小波滤波参数
3.2 试验结果分析
根据采集的实车试验数据,如试验工况车速、HEV动力系统转速、扭矩等,运用粒子群智能算法对汽车载荷和试验道路坡度进行辨识。
在工况试验数据采集和行驶状况辨识试验的基础上,对原始数据进行小波滤波之后对两种试验工况的结果进行分析(见图4和图5)。
由图4和图5可知,在两种工况下,汽车总质量辨识相对误差最大值分别为4.19%和6.81%,相对误差绝对平均值分别为2.17%和3.25%,道路坡度相对误差最大值分别为19.28%和9.83%,相对误差绝对平均值分别为2.92%和4.78%。取两种工况平均值后,可知汽车总质量辨识的相对误差绝对平均值为2.71%,道路坡度辨识的相对误差绝对平均值为3.85%。

图4 工况1试验结果
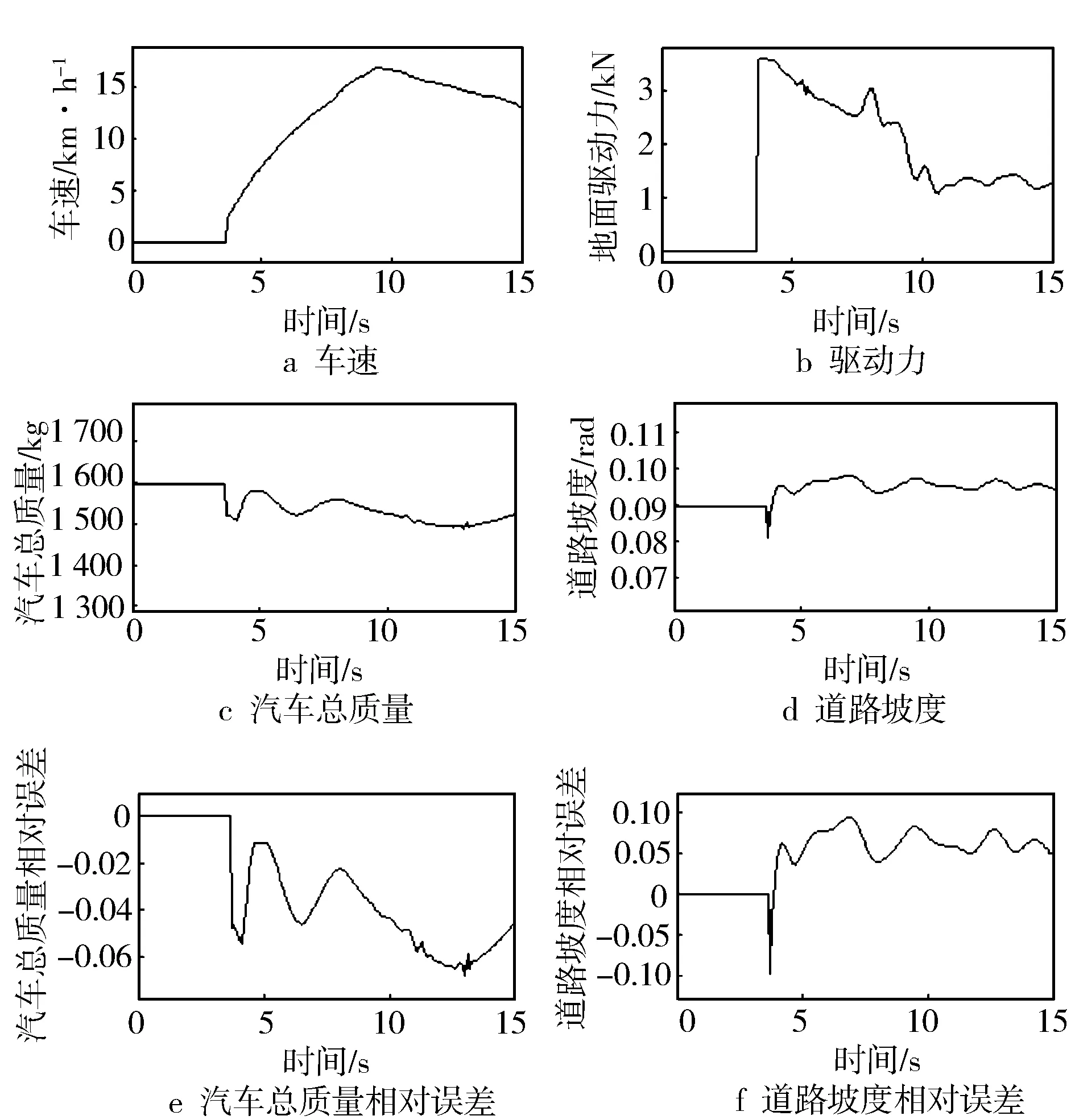
图5 工况2试验结果
4 结束语
本研究以某款混联式HEV为研究对象,建立了汽车行驶状况辨识模型,将实车采集的动力学参数进行小波滤波,在线构造超定超越方程组,运用最小二乘法建立了求解方程组的驱动力偏差最小目标函数。
实车验证结果表明,运用基于小波和粒子群算法的HEV行驶状况辨识方法辨识出HEV总质量相对误差绝对平均值为2.71%,道路坡度辨识的相对误差绝对平均值为3.85%,辨识效果较为理想。采用基于小波滤波和粒子群算法的HEV行驶状况识别方法,能够有效识别行驶状况,为制定满足驾驶意图的控制策略奠定基础,进而达到降低整车能耗、提高成员舒适性的目的。
[1]ChenZ,XiongR,WangC,etal.Anon-linepredictiveenergymanagementstrategyforplug-inhybridelectricvehiclestocountertheuncertainpredictionofthedrivingcycle[J].AppliedEnergy,2016,185:1663-1672.
[2] 孙超.混合动力汽车预测能量管理研究[D].北京:北京理工大学,2016.
[3]Wilhelm,Erik,Rodgers,etal.Towardsreal-timeidentificationofelectricvehiclemass[C].UnitedStates:SAEConference,2013.
[4] 冯源,余卓平,熊璐.基于分段递推最小二乘估计的汽车质量辨识试验[J].同济大学学报(自然科学版),2012(11):1691-1697.
[5] 唐高强.并联混合动力客车制动过程换挡规律研究[D].北京: 北京理工大学,2015.
[6]Sahlholm,Per,Johansson,etal.Segmentedroadgradeestimationforfuelefficientheavydutyvehicles[J].UnitedStates:IEEE,2010,58(8):1045-1050.
[7] 姚雪萍.载货汽车危险状态辨识及监测预警研究[D].长春:吉林大学,2014.
[8]Rhode,Stephan,Gauterin,etal.Vehiclemassestima-tionusingleast-squaresapproach[J].IEEEConfIntellTransportSystProc,2012:1584-1589.
[9]Fathy,HosamK,Kang,etal.Onlinevehiclemassestimationusingrecursiveleastsquaresandsupervisorydataextraction[C]//AmericanControlConference.USA:IEEE,2008:1842-1848.
[10]Ganji,Behnam,Kouzani,etal.Alook-aheadroadgradedeterminationmethodforHEVs[J].Lect.NotesElectr.Engineering,2011,98(2):703-711.
[11]Ryan,Jonathan,Bevly,etal.Robustsideslipestima-tionusingGPSroadgradesensingtoreplaceapitchratesensor[C]//The2009IEEEInternationalConferenceonSystems,ManandCybermetics.USA:IEEE,2009:2026-2031.
[12] 余志生.汽车理论[M].北京:机械工业出版社,2006:77-79.
[13]ChenS,HungY,WuC,etal.Optimalenergymanagementofahybridelectricpowertrainsystemusingimprovedparticleswarmoptimization[J].AppliedEnergy,2015,160:132-145.
[14] 李衍达.小波滤波方法及应用[M].北京:清华大学出版社.2004.
[15]ClercM,KennedyJ.Theparticleswarm-explosion,stability,andconvergenceinamultidimensionalcomplexspace[J].IEEETransactiononEvolutionaryComputation,2002,6(1):58-73.
[16]HongYY,LinFJ,ChenSY,etal.Anoveladaptiveelite-basedparticleswarmoptimizationappliedtoVARoptimizationinelectricpowersystems[J].MathematicalProblemsEngineering,2014(4):1-14.
[17]WangY,LiB,WeiseT,etal.Self-adaptivelearningbasedparticleswarmoptimization[J].InformationSciences,2011,181(20):4515-4538.
[18]ShiY,LiuH,GaoL,etal.Cellularparticleswarmoptimization[J].InformationSciences,2011,181(20):4460-4493.
[19] Selvakumar A I,Thanushkodi K.A new particle sw-arm optimization solution to nonconvex economic dispatch problems[J].IEEE Transaction Power Systems,2007,22(1):42-51.
[20] 温正.精通Matlab智能算法[M].北京: 清华大学出版社, 2015:106-108.
[编辑: 姜晓博]
Identification Method of HEV Driving Condition Based on Wavelet Filtering and PSO Algorithm
GUO Hailong1,2, ZHANG Yongdong1,2, ZHANG Shengbin1
(1. School of Automobile and construction machinery, Guangdong Communication Polytechnic, Guangzhou 510650, China; 2. School of Mechanical & Automobile Engineering, South China University of Technology, Guangzhou 510641, China)
The recognition method of driving condition for the parallel series HEV based on wavelet filtering and PSO algorithm was put forward to identify the real-time road slope and vehicle load changes effectively so that the driver could adjust his driving behavior in time through the control strategy of driving system. The identification model of vehicle driving condition was established and the optimization objective function was determined by the least square method. Then the recognition principle of driving condition based on wavelet filtering and PSO algorithm was studied. Finally, the recognition test of driving condition with the method was conducted. The wavelet filtering, the recognition of driving road slope and vehicle load and the wavelet re-filtering of vehicle test data were further conducted. The results show that the absolute average value of relative error for vehicle load and road slope is 2.71% and 3.85% respectively. Therefore, the proposed method is feasible.
hybrid electric vehicle(HEV); least square method; particle swarm optimization (PSO) ; wavelet filtering; identification
2016-11-18;
2017-03-27
广东省优秀青年教师培养项目(YQ2013197);广东省高等学校高层次人才项目(2013-203);广东省交通运输厅节能减排项目(节能-2014-06-002)
郭海龙(1981—),男,副教授,博士,主要研究方向为新能源汽车技术;107289145@qq.com。
10.3969/j.issn.1001-2222.2017.02.011
U469.72
B
1001-2222(2017)02-0062-05