地铁隧道多方位高精度钻孔设备的方案设计
2017-05-10刘桓龙于兰英
刘桓龙 李 茂 于兰英 柯 坚 郑 涛
(西南交通大学机械工程学院,610031,成都//第一作者,副教授)
地铁隧道多方位高精度钻孔设备的方案设计
刘桓龙 李 茂 于兰英 柯 坚 郑 涛
(西南交通大学机械工程学院,610031,成都//第一作者,副教授)
针对地铁隧道内悬挂接触网汇流排安装中钻孔设备施工范围小、效率低、劳动强度大等缺点,设计了一种基于光机电一体化的地铁隧道多方位高精度钻孔设备。介绍了其总体方案、主要结构和控制方案。该钻孔设备采用激光测量仪、角传感器、光学摄像机等实现自动化精密定位,PC机和PLC实现自动化控制,伺服电机、电动缸、回转轴承实现6个自由度的精确调整,适应复杂多变的隧道地形和施工要求。该钻孔设备可安装4个钻机,不仅能向隧道顶部钻孔,还可以任意角度向隧道上部侧壁钻孔。
地铁隧道; 钻孔设备; 光机电一体化
Author′s address School of Mechanical Engineering,Southwest Jiaotong University,610031,Chengdu,China
地铁列车受电有第三轨受电和刚性悬挂接触网受电等类型。刚性悬挂接触网具有结构简单、性能可靠和维护成本低等特点,在我国电气化铁道尤其是城市轨道交通中发展前景广泛[1]。刚性悬挂接触网汇流排支撑装置安装时需先在地铁隧道顶部钻锚螺栓孔,同样,隧道侧壁线缆、管道安装也需要钻孔。传统的人工作业在梯车上扶持钻机钻孔法效率低、劳动强度大,施工时溅出大量灰尘,对施工人员的健康损害较大[2]。地铁隧道内有很多大半径的曲线;隧道纵向有坡度;为平衡车辆转弯时的离心力,横向因设超高而形成横坡。这就要求钻孔平台能进行偏航、俯仰、横滚即3个坐标轴的旋转调整。目前的一些钻孔设备自由度少,无法6自由度调整或无法在调整后长时间自锁,以至于只能在地铁隧道某一部分钻孔,施工范围小。因此,亟需设计一种自动化程度高、精度高的钻孔设备。为了弥补钻孔设备的不足,适应地铁迅猛发展的需要,本文介绍了一种基于光机电一体化的地铁隧道多方位高精度钻孔设备的方案设计。
1 总体方案设计
整个设备安装在地铁平车上,分为上中下3个部分。下部为纵横向调整平台。中部有左右2个电动缸(电动缸1、2)及4个直线轴承导轨,2个电动缸中间是电动滑台和电动缸3,可实现升降、横滚、俯仰动作。上部有回转轴承下骨架、回转轴承下基座、回转轴承及其动力部分、回转轴承上基座、回转轴承上骨架、电动缸4和4套直线轴承光轴导轨、钻孔机安装骨架、钻孔机。钻孔机安装平台以型钢为骨架,上面焊接有一排相同间距的矩形空心型钢,因此4个钻孔机可在平台上实现XY位置无级调节,可一次性钻4个孔。钻孔机调整好高度后可锁紧在立柱上,由电动缸4一起推进。图1为钻机垂直于隧道顶部钻孔结构示意图。图2为钻机垂直于隧道侧壁钻孔结构示意图。
钻孔设备定位、施工步骤如下:
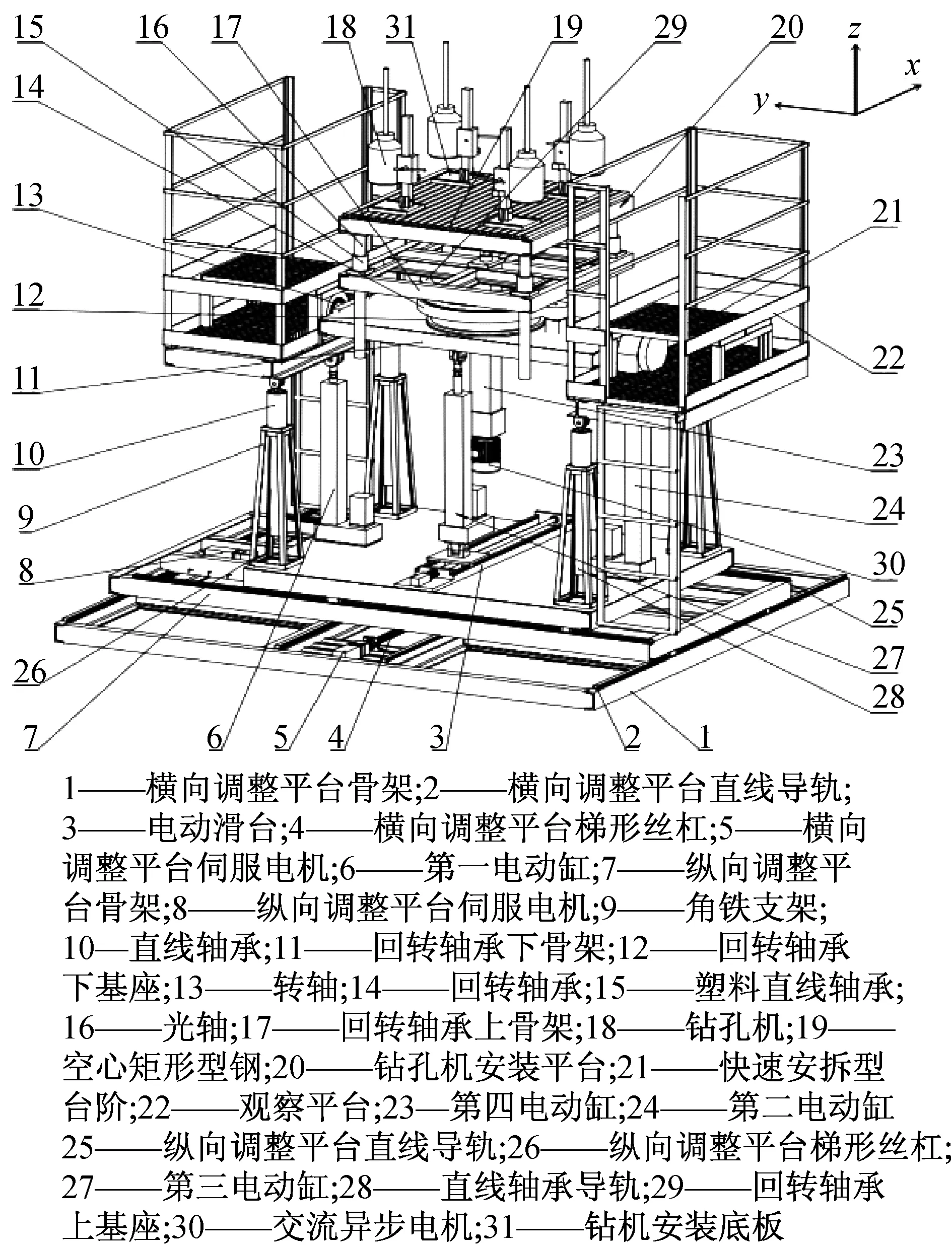
图1 钻机结构示意图
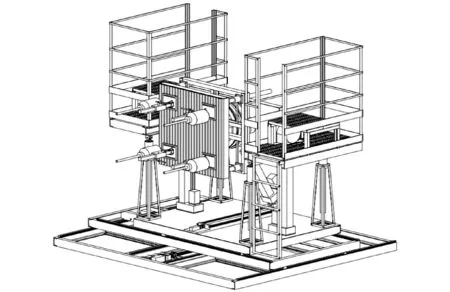
图2 钻机隧道侧壁钻孔示意图
(1) 根据施工参数,调整好4个钻机的安装位置。
(2) 平车往螺栓孔位置移动。平车轮对上装有光电编码器,由光电编码器测量的位移和偏航倾角传感器测得的偏航角度求积分得到平车行走的直线位移。该方法的精度、效率远胜于目前使用的人工卷尺测量法。
(3) 纵横向位置细调。由于司机停车有一定误差,且螺栓孔不一定在上方正中间,需再由纵向(Y向)横向(X向)平台伺服电机传动丝杠螺母精密调整。
(4) 高度、横滚、俯仰调整。横滚倾角传感器测量横向坡度,三维激光测距仪、隧道激光断面仪测量钻具与预定螺栓孔之间的距离和角度,电动缸1、2、3和电动滑台协同运动;在升高的同时调整回转轴承下骨架横向坡度,随之钻机安装平台横向坡度也得以调整。电动缸1、2、3和电动滑台差异运动可实现俯仰动作。
(5) 偏航转角传感器测量路径曲率,回转轴承驱动电机运动,调整偏航角。
(6) 电动缸4进给,到达钻孔位置前开动钻机,开始钻孔。进给过程由三维激光测距仪、隧道激光断面测量仪、电动缸4的光电编码器测量反馈。整个施工过程也可在旁边的观察控制平台上进行人工控制。
该设备使用伺服电机、丝杠螺母、传感器等闭环控制,可实现较高的精度。电动缸由电机传动丝杠,螺母作直线运动,伸缩杆和螺母连接。电动缸能承受一定的扭转力矩和径向力。虽然部分梯形丝杠可以自锁,但摩擦大、磨损快、速度慢、不能频繁运动。行星丝杠是线接触,传动平稳,抗振能力强,但价格昂贵且结构复杂,还没有广泛使用。滚珠丝杠是标准件,摩擦系数小,可减小驱动扭矩,提高传动效率,保证定位精度。随着滚珠丝杠的迅速发展,越来越多的电动缸选用滚珠丝杠。电动缸内部行程两端有非接触式接近开关,以防止电动缸过冲。电动缸垂直升降时,从安全方面考虑,电机必须附带制动。电动缸相比传统液压或气压作动器具有控制性能更优、速度更快、寿命更长、减少辅助设施投入、节省安装空间、减少设备维护、节能、安装和拆卸调试方便、噪声低[3]、精度高等优势。
2 主要结构和控制方案的设计
2.1 底部纵横向调整平台
该设备最下面是横向调整平台其骨架由型钢焊接而成,滚动直线导轨安装在骨架上面,带制动伺服电机传动丝杠螺母带动设备在滚动直线导轨上精确移动。滚动直线导轨摩擦力小、驱动功率小,能实现高定位精度和重复定位精度,能实现无间隙运动提高机械系统的运动刚度,不仅能承受较大的动载荷和静载荷,还能承受较大的倾覆力矩,满足本设备较大振动力和复杂地形导致的倾覆力矩的需要[4]。
纵向调整平台安装在横向调整平台上面,其安装方式与横向调整平台相同。
2.2 升降、俯仰、横滚机构
横向调整平台上有电动缸1、2。电动缸1、2两侧各有2个直线轴承导轨副,直线轴承安装在角铁支架上,电动缸1、2和直线光轴铰接于上面的型钢骨架。2个电动缸中间是电动滑台和电动缸3。电动缸3下部铰接于电动滑台滑板,伸缩杆上部使用关节轴承球铰在回转轴承下骨架的一侧,并可手动更换左右侧。电动缸1、2、3都是伺服电机传动。钻孔设备位置调整需要精密控制和自锁,以防误差过大或者钻孔时位置偏移折断钻具。关节轴承是由一个内球面的外圈和一个外球面的内圈组成的特殊的滑动轴承,广泛用于速度较低的摆动运动。内圈外球面上镶有复合材料,可以自润滑,其相当于一个球副,具有3个转动自由度。
以转轴为杠杆中心,电动缸3伸缩杆上球铰为杠杆一端点,依靠电动滑台的滑动和电动缸3的伸缩,实现钻孔设备上部以转轴为中心、在水平面上半面180°旋转,即横滚运动。如此,可以对隧道侧壁钻孔。
回转轴承下骨架通过左右两端的空心转轴安装在左右型钢骨架的轴承上。由于轴承间设备较长,且为了俯仰运动的需要,采用一端固定、一端游动的安装方式。电动缸1、2、3协同升降实现上部设备升降,差异升降实现俯仰运动。
2.3 回转机构
囿于地质、地下市政工程等原因,地铁隧道多是由大半径曲线组成。在弯曲轨道上钻孔时,4个孔仅靠XY调整无法全部对准,还需要偏航一定角度。
回转轴承可同时承受较大的轴向、径向负荷和倾覆力矩。其机构紧凑,装配和维护简单,密封及润滑条件好,工作平稳,消除了大的冲击,旋转阻力小、磨损小、寿命长。回转轴承已标准化生产,有无齿式、外齿式和内齿式的三排圆柱滚子组合回转轴承,双排异径球回转轴承,单排交叉圆柱滚子回转轴承,单排四点接触球回转轴承等。其中单排交叉圆柱滚子回转轴承由2个座圈组成,结构紧凑、质量小,滚柱为1∶1交叉排列,可承受较大的动载荷[5]。
当垂直于隧道侧壁时,回转轴承各方向受力最大,在此状况下选择、校核回转轴承。原则上,必须以作用在支承上的最大载荷为静态计算值。初步选择111.25.500.001型外齿式单排交叉滚柱式回转支承。通过SolidWorks三维建模,计算得到回转轴承上部设备质量为330 kg,重心为160 mm,转动惯量为80.5 kg·m2。根据力的平移定理,垂直侧壁钻孔时,当轴向力为3 300 N、倾覆力矩为528 N·m、匀速钻孔时,钻孔阻力等于钻机所受的轴向力(由后文中的式(2)知,为4×1 060 N)。安全系数取铁路起重机安全系数,为1,计算轴向力Fa、倾覆力矩M,查找所选型号回转支承对应的静态承载曲线图。在曲线图中标出(Fa,M),并核对坐标点(Fa,M)在静态承载曲线的下方,则选型符合要求。
回转轴承可实现上面的钻机平台360°连续旋转(即偏航运动),实现成组钻孔精确定位。其由带制动的伺服电机、减速器驱动,自锁可靠性好。文献[6]通过理论推导计算,得出挖掘机、起重机等工程机械中回转支承装置摩擦阻力矩的替代公式。即当GDπ-8M<0 (G为轴向载荷,D为回转支承滚道中心直径)时,
(1)
式中:
K——滚动体的形状系数,对于滚柱取K=1,对于滚球取K=0.95;
μ——回转支承装置滚动体与滚道之间的摩擦系数,交叉圆柱滚子回转轴承μ取0.004;
α——滚动体与滚道的接触角,此处α=45°;
M——倾覆力矩。
计算可得Mf=3.8 N·m。所选电机额定转矩应大于摩擦阻力矩。
2.4 工进机构
回转轴承上骨架安有前法兰型电动缸4。骨架4个角安有塑料直线轴承光轴导轨副,起导向作用,可承受轴向力和转矩。塑料直线轴承承受的载荷大、噪声小,可在灰尘和液体等恶劣环境中运行。电动缸4上部用关节轴承球铰于钻机安装骨架下面。钻孔机安装平台可由电动缸推进,一次性钻4个孔。
电动缸4的进退仅与钻孔深度有关。在施工中螺栓孔深度的允许误差为2 mm,所以从性价比考虑,电动缸4没有必要用伺服电机,用带制动的交流电机,以及用编码器测量位移、变频器控制速度,已完全能满足要求,并且价格便宜,输出力矩和制动力矩较大。
2.5 钻孔机平台
以往隧道钻孔设备只能一次钻一个孔,效率低,或多个钻机固定安装,无法方便迅速的调整,且地铁隧道设备安装孔规格不一,设备通用性差。本设备则很好地解决了这一问题:钻孔机安装平台以型钢为骨架,上面安装有一排相同间距的矩形空心型钢,钻孔机安装底板开有两道槽以安装螺栓,因此4个钻孔机可在平台上实现XY位置无级调节,一次性钻4个孔,从而提高生产效率。通过对地铁隧道接触网大量施工信息的查询得知,螺栓孔间距小的有200 mm×200 mm,大的主要有1 000 mm×1 000 mm,所以本设备钻孔安装平台长宽为1 000 mm×1 000 mm。钻具与支撑杆不在同一轴线(见图3),反转钻机安装方向,钻孔范围可略大于平台尺寸。
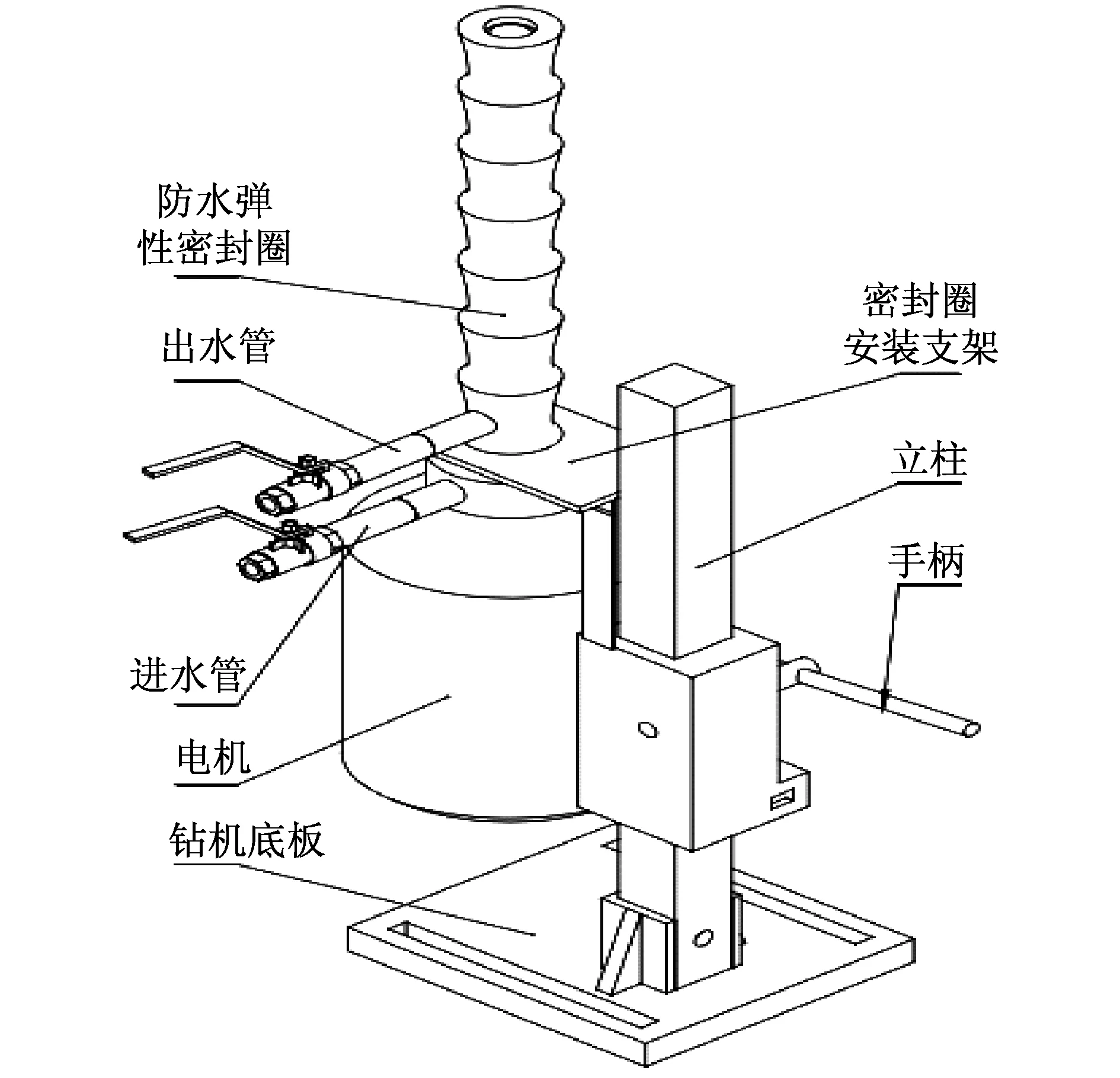
图3 改装的水钻结构示意图
将钻机钻具向上,可对隧道顶部和侧壁钻孔。4个钻机可分别手动进给,也可将钻机升降系统调整好高度后锁紧在支柱上由电动缸4推进一起进给。小径用普通钻机钻孔,大径(Φ18 mm以上)则用金刚石钻机钻孔。金刚石钻机可直接钻断隧道衬砌混凝土中的钢筋,效率高,干净卫生,对钻具损坏小,可减轻工作劳动强度,改善工作环境。用金刚石钻机钻孔时,钻具上围绕有防水弹性密封圈。密封圈可压缩,可随钻机一同进给。钻具底部安有进水管,密封圈底部有排水管,水循环一周,实现封闭式给排水。金刚石钻机的良好水封性能以及转动时的离心力作用,可确保水不会流下来。
根据经验,单个钻机钻孔时所需轴推力的大小由下式确定[7]:
F=(2.5~4)Df
(2)
式中:
F——轴推力,N;
D——钻头直径,mm;
f——岩石普氏硬度系数。
计算可知,单个钻机所需轴推力的大小约为1 060 N。
2.6 其他辅助设施
柴油发电机与应急电源,以及水泵水箱、控制台、休息室等安装在平车一侧。钻孔设备既可用市电(经电缆传输),也可用柴油发电机发电。电动缸制动器都是失电制动。市电或柴油发电机突然停电时,电动缸立即制动,因此整个设备具有较高的安全性。如不能立刻恢复供电,则用应急电源或手动输入端将电动缸收回。
2.7 控制方案
控制系统使用上位PC机和PLC(可编程逻辑控制器)。上位机的使用,使得复杂控制算法的实现更为方便,并且能够完成良好的人机监控界面。PLC抗干扰能力强、工作可靠,能在恶劣的现场环境和复杂的过程中依然保持较高的性能[8]。PLC发送信号控制伺服电机驱动器及交流电机变频器,并接受编码器、激光测量仪、角度传感器等测量仪的反馈信号,如图4所示。
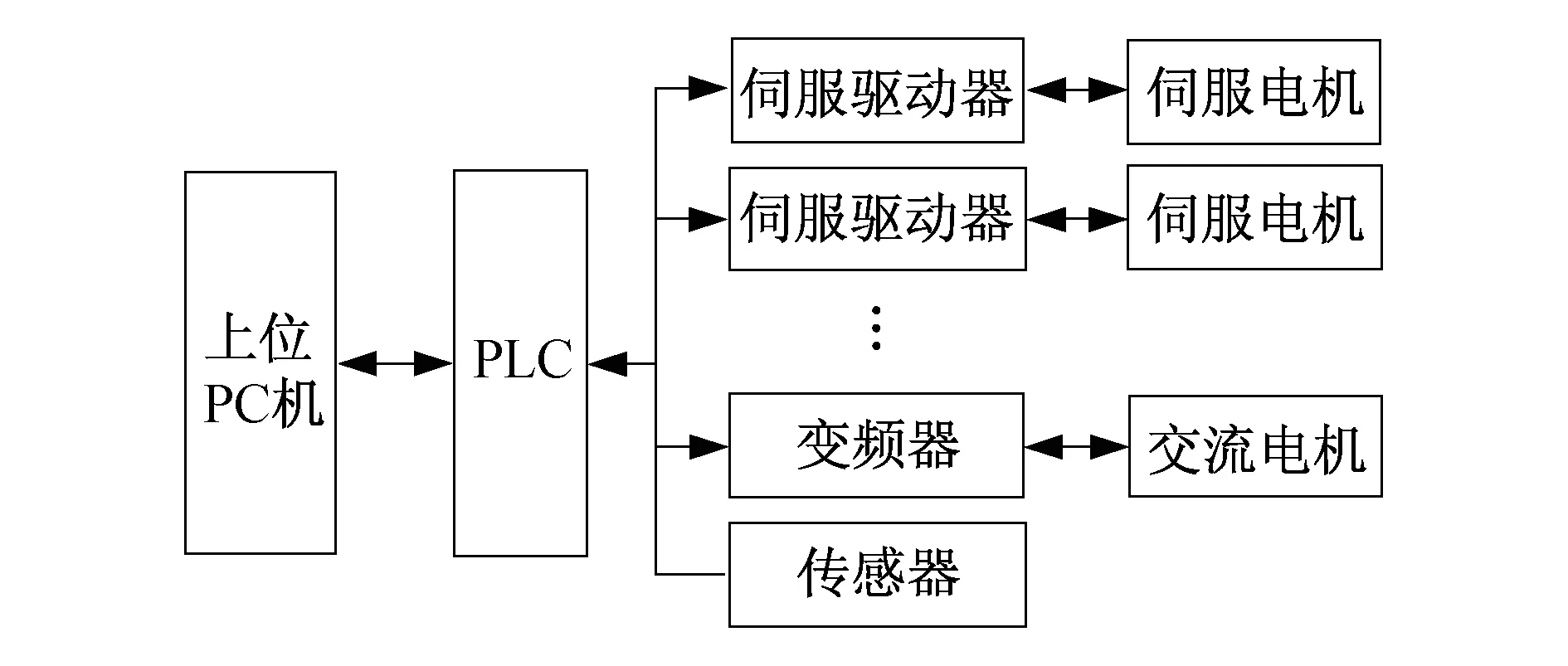
图4 自动控制系统示意图
2.8 设备参数
综上所述,本文介绍的地铁隧道钻孔设备主要参数如表1所示。其质量较小,结构紧凑,满足限界要求。
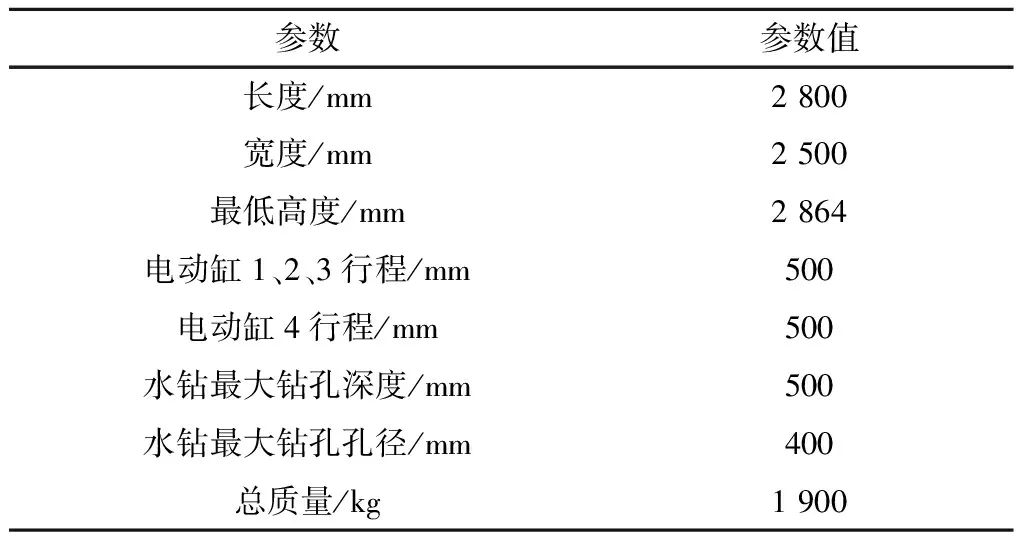
表1 地铁隧道钻孔设备主要参数
3 结语
经计算分析,汇流排一般12 m一段(由鱼尾板将其连接为一体),平车移动速度为300 mm/s,纵横向调整平台最大移动速度为500 mm/s,电动缸最大速度为567 mm/s,所以5~6 s便可完成定位开始钻孔。根据工程经验,螺栓孔最深为170 mm,孔径最大为36 mm(一般为22 mm或24 mm),使用金刚石钻机60 s左右便可完成钻孔,且是一次性钻4个孔。整个过程只需要2人操作,比以往设备总体可提高效率4倍以上。
本文通过对地铁隧道接触网施工的研究,设计开发了一种能胜任地铁隧道顶部和侧面安装钻孔要求的多方位高精度钻孔设备。该设备功能多、安全性高,可大幅提高施工效率,创造巨大的经济价值。
[1] 韩兰贵,唐杰.刚性悬挂接触网施工方法探讨[J].城市轨道交通研究,2003,6(3):71-75.
[2] 刘 军,刘桓龙,柯坚,等.地铁隧道内钻孔设备的结构设计[J].现代机械,2014(6):8-12.
[3] 佚名.EXLAR电动缸在运动仿真、测试设备的应用[J].伺服控制,2007(4):82-83.
[4] 计时鸣.机电一体化控制技术与系统[M].西安:西安电子科技大学出版社,2009.
[5] 中华人民共和国工业和信息化部.回转支承:JB/T 2300—2011 [S].北京:机械工业出版社,2011:1.
[6] 何西泠.回转支承装置的摩擦阻力矩[J].中国工程机械学报,2006,4(2):183-186.
[7] 徐小荷,余静.岩石破碎学[M].北京:煤炭工业出版社,1984.
[8] 祁鲲,厉虹.异步电动机定位控制技术研究现状及发展展望[J].北京机械工业学院学报,2001,16(3):13-16.
Installation Plan of Subway Tunnel Drilling Equipment with Multi-direction and High Precision
LIU Huanlong, LI Mao, YU Lanying, KE Jian, ZHENG Tao
The lower scope,lower efficiency,higher labour intensity are the main problems existed in the installation of suspension catenary motherboard in subway tunnel.Aiming at which,a new subway tunnel drilling equipment with multi-direction and high precision based on opto-mechatronics integration is designed,the overall plan, main structure and control method of it are introduced.Laser measuring instrument,angle sensors and optical camera are used in this equipment to realise automatic precise positioning,PC and PLC are used to realize automatic control,servo motor,electric cylinder,slewing bearing are used to realize accurate adjustment of six degrees of freedom,so as to adapt to the complex terrain and construction requirements.This equipment installed with 4 drills can drill to the top of the tunnel and drill arbitrary inclined angle holes on the side.
subway tunnel; drilling equipment; opto-mechatronics integration
U445.3+2
10.16037/j.1007-869x.2017.04.008
2016-01-03)
