基于MNC-FastICA算法的稳健自适应波束形成
2017-05-10阮宗利钱国兵袁晓垒
阮宗利,魏 平,钱国兵,袁晓垒
(1. 电子科技大学电子工程学院网络空间安全研究中心 成都 611731;2. 中国石油大学(华东)理学院 山东 青岛 266580;3. 西南大学电子信息工程学院 重庆 北碚区 400715)
基于MNC-FastICA算法的稳健自适应波束形成
阮宗利1,2,魏 平1,钱国兵3,袁晓垒1
(1. 电子科技大学电子工程学院网络空间安全研究中心 成都 611731;2. 中国石油大学(华东)理学院 山东 青岛 266580;3. 西南大学电子信息工程学院 重庆 北碚区 400715)
针对导向向量失配的稳健自适应算法主要是基于导向向量不确定集约束,但是其约束参数往往难以确定,提出了基于修正的非圆复值快速不动点算法(MNC-FastICA)的波束形成方法,通过盲分离得到的分离矩阵来构造波束权向量,并对由此产生的信源幅相模糊进行校正。该方法不必预先估计信号来波方向,避免了传统方法中来波方向估计不准引起的期望信号的导向向量失配;对于阵列通道幅相误差导致的导向向量失配,该方法对其不敏感,不必对阵列进行校正。仿真实验与最差性能最佳化(WCPO)等经典方法作了性能对比,结果验证了该算法的有效性和稳健性。
阵列; 复数快速不动点算法; 独立分量分析; 稳健自适应波束形成
迄今为止,波束形成的研究者们已经提出了大量的自适应方法,设计出了许多优秀的波束形成器,如Caopn方法即样本协方差矩阵求逆法(sample matrix inversion, SMI)、对角加载SMI(diagonal loading SMI, LSMI)方法、稳健Capon方法(robust capon beamforming, RCB)和最差性能最佳化(worst-case performance optimization, WCPO)方法等[1-3],最近的文献中也提出了一些新的方法[4-6],如基于非圆性恢复的对角加载方法(noncircularity restoral for diagonal loading, NRDL)[6]。然而,这些算法大多数对样本快拍数或导向向量误差敏感。其中,导向向量失配的原因主要是来波方向估计误差和阵列误差[7]。针对导向向量失配的自适应算法,目前的研究主要是对导向向量不确定集进行建模,将该不确定集约束到波束形成算法中,但是实际中其约束参数往往难以确定,它需要提供更多的先验信息,且约束参数过大或过小都会影响输出性能[7-8]。此外,文献[9]提出使用特征矩阵联合近似对角化(joint approximate diagonalization of eigen-matrices, JADE)方法进行盲波束形成,获得了比SMI等方法更好的性能,但是没有对盲分离带来的信号幅相误差进行校正。
在信源非高斯等假设条件下,本文提出基于MNC-FastICA算法的波束形成,通过由盲分离得到的分离矩阵来构造波束权向量。由于不涉及波束观察方向,该方法避免了LSMI等方法中来波方向估计不准引起的导向向量失配问题。对于阵列通道幅相误差导致的导向向量失配,该方法对其不敏感,不必对阵列进行校正,能获得优于WCPO等方法的输出性能。对于理想的或仅有通道幅相误差的阵列,该方法能够对盲分离带来的幅相模糊进行校正。
1 信号模型
本文以均匀线阵作为信号接收的阵列。
1.1 均匀线阵接收信号模型
假定空间远场阵列接收的信号为窄带信号,入射波可近似为平面波。如图1所示,有K个窄带信号分别从θ1, θ2,…,θK方向入射到阵元间隔为d的M元均匀天线阵列上。
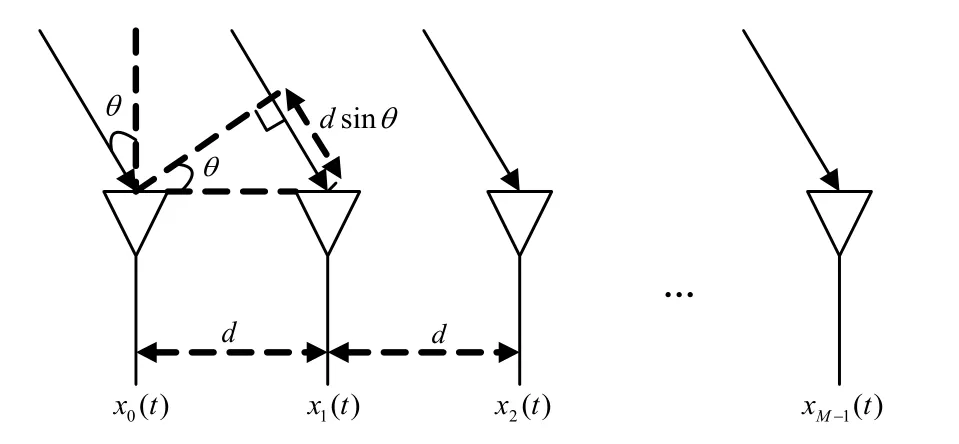
图1 均匀线阵接收信号模型
以阵元0作为参考阵元,则天线阵列接收到的离散时间基带信号可表示为:


式中,a(θi)=[1e−jφi…e−j(M−1)φi]T是入射方向 θi对应的导向向量,φi=2πd sinθiλ表示空间相位,λ表示载波的波长。
1.2 波束形成器的输出信号模型
波束形成是对阵列各阵元采集的数据进行加权求和运算,得到波束输出,达到选择期望信号并抑制干扰和噪声的目的。将这些权值定义成向量,则波束形成器的波束输出为:

若权向量w满足wHa(θi)=0,则表明 θi方向的信号被抑制,不能通过波束形成器;若wHa(θi)=1,则表明iθ方向的信号可以无失真地通过波束形成器。可见,通过改变权向量,可以使某些方向的信号通过波束形成器,而抑制另一些方向的信号。
1.3 假设条件
利用MNC-FastICA算法来设计波束形成器的权向量,需要进一步作以下假设:
H1:K个未知信源(包括一个期望信号和K−1个干扰,方向也未知)是相互独立的,且至多有一个是高斯源;
H2:接收阵列的阵元个数M大于信源个数K,且阵列流形矩阵A是列满秩的;
H3:期望信号功率小于所有干扰信号功率;
假设H1和H2是独立分量分析(independent component analysis, ICA)模型的一般性假设[10],对于基于阵列结构的混合矩阵,列满秩实际上就是要求空间信号的入射角度相隔不能太近。经过盲分离得到的信号中如何区分出期望信号,需要某些先验信息,这里假设干扰信号很强,功率大于期望信号。
2 用ICA方法设计波束权向量
ICA方法广泛用于解决盲信号分离问题[10]。对于瞬时混合x(n)=As(n)+v(n),其中s(n)、v(n)和 x(n)分别表示未知信源向量、噪声向量和观测向量,A是未知混合矩阵,ICA方法就是要寻找一个分离矩阵W使得y(n)=WHx(n)是源信号s(n)的估计。波束形成的目的是要通过选择最优的权向量w来筛选期望信号而尽量抑制干扰和噪声,即从混合信号中提取出期望信号,即y(n)=wHx(n)是期望信号s(n)的估计,因此在本质上也是在进行信号分离,此时的混合矩阵是波束形成中的阵列流形矩阵。所以,波束形成问题可看作一类特殊的盲信号分离问题,ICA方法也用于波束形成。
2.1 MNC-FastICA算法
快速不动点算法(fixed-point algorithm, FastICA)是一类高效的盲信号分离算法,其扩展算法包括复数的C-FastICA、非圆信号的NC-FastICA和去噪的非圆复信号MNC-FastICA等[10-12]。本文采用MNC-FastICA算法来辨识信源,步骤如下:
1) 对阵列观测信号 x做中心化处理,即x←x−mx,其中mx=E{x}是x的均值;
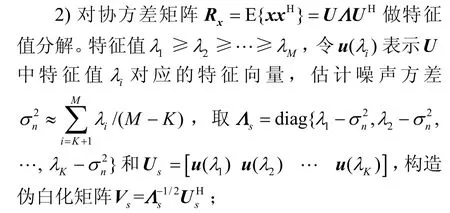
3) x作伪白化q=Vsx;
4) 初始化M=IK,IK表示K×K的单位阵;
5) 对M中的各列向量mi(i=1,2,…,K),依次运用下式进行更新:

在实际中,均值mx和协方差矩阵Rx都是未知的,常用一段样本数据的平均即样本均值和样本协方差矩阵来估计,分别表示如下:

式中,N为样本快拍数。
2.2 校正盲分离导致的幅相模糊
众所周知,ICA方法用于分离盲信号,一般会存在幅相的不确定性和顺序的不确定性[10-11],这两种不确定性在ICA中也是可以被接受的。而在进行波束形成时,往往要求期望信号尽可能无失真地通过空域滤波器,这与盲分离的幅相模糊似乎形成了一对矛盾;而且,幅度模糊会影响对信号功率的检测。幸运的是,对于理想阵列或仅有通道幅相误差的阵列,利用阵列流形矩阵的特殊结构,盲分离的幅相模糊可以被校正。
在不考虑噪声的情况下,如果阵列是理想的,则阵列接收数据经盲分离后,其分离矩阵W和混合矩阵A(这里就是阵列流形矩阵)有如下关系:

记矩阵WH的伪逆为B,即B≜(WH)†,则有:

由于置换矩阵P的逆−1P仍然是置换矩阵,因此AP−1是将A中的某些列交换位置。设矩阵A中从左到右各列编号为1,2,…,K,置换后的编号为P1, P2,… ,PK,则AP−1可表示为:

将AP−1和D代入式(4),可得:
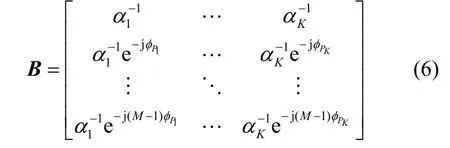
矩阵B的第一行元素恰好包含了各信号的幅相模糊信息,即可以从B中提取幅相模糊,以便对估计信号进行幅相校正。于是有:

式中,B(1, :)表示取矩阵B的第一行。
考虑噪声后,盲分离得到的输出可以近似为:
式中,Δs(n)=WHv(n)表示由于加性噪声引起的误差。因此,可以通过对y(n)左乘矩阵−1D 进行盲分离的幅相校正,即:


将y(n)代入上式,可得:

从前面的分析过程不难发现,幅相模糊信息的提取利用了阵列流形矩阵第一行元素全为1这一特征,而没有涉及到矩阵中的其余元素,因此盲分离的幅相校正方法对其他任意结构的阵列照样适用。
如果考虑阵列的通道幅相误差,则式(1)所表示的阵列接收信号应改写为:

相应地,式(3)应改写为:

类似于式(6),矩阵HW的伪逆B可以表示为:

可见,仍然可以从B中第一行元素直接得到对角矩阵D,式(9)和式(10)所表示的校正方式依然适用。
通常β0≠1,因此校正后的信号仍然存在幅相误差0β。然而,标量0β是会作用到每一个信号上的,包括期望信号和干扰信号,因此它不会妨碍对期望信号的判断。
综上,无论阵列通道幅相误差是否存在,盲分离后信源估计的幅相校正都可写成:

2.3 波束权向量

依据前面的假设H3,假设判别出(n)中第i个信号是期望信号,则的第i列就是要寻找的波束权向量w,即:

为了方便,这里把所提方法得到的波束形成器命名为MNC-FastICA波束形成器。
综上,MNC-FastICA波束形成算法可归纳为:
1) 用MNC-FastICA算法对观测信号x做盲分离,得到分离矩阵W和信源估计y;
2) 对WH求Moore-Penrose伪逆B=(WH)†;
3) 提取B中第一行元素,生成盲分离的幅相模糊的校正矩阵diag{B(1, :)};
2.4 性能指标
本文以输出信干噪比(signal to interference plus noise ratio, SINR)来衡量波束形成器的性能。假定期望信号方向为 θ1,干扰方向为 θ2,θ3,…,θK,则波束权向量w确定后,波束形成器的输出SINR[7]为:

3 计算机仿真
本节通过仿真实验,将所提波束形成器与理想Capon(导向向量和干扰噪声协方差矩阵都精确已知)、SMI、LSMI、NRDL和WCPO等波束形成器作性能对比。仿真中,LSMI方法的加载噪声级设置为经验值LNR=10 dB,NRDL方法采用文献[6]中的方案2,即NRDL2来确定对角加载量,WCPO方法中导向向量误差范数约束参数设为ε0=2.8。
基本仿真条件:假定空间有K=3个远场窄带信号入射到M=10阵元的均匀线阵上,阵元间距为半波长即d=λ/2。期望信号为二相移键控(binary phase shift keying, BPSK)信号,入射方向为θs=20°,两个强干扰信号分别是BPSK和四相相移键控(quadrature phase shift keying, QPSK)信号,入射方向分别为θi1=−40°和θi2=60°,干信比(interference to signal ratio, ISR)均为20 dB。加性噪声是功率为0 dB的复高斯白噪声。期望信号、干扰和噪声相互独立。期望信号的信噪比(signal to noise ratio, SNR)及观测数据的快拍数在具体实验中设定,实验结果均取自500次蒙特卡洛实验的平均。
3.1 导向向量匹配时各波束形成器的性能比较
假设导向向量匹配,此时显然不存在阵元通道幅相误差和来波方向估计误差。图2显示了各波束形成器的输出SINR随输入SNR与快拍数变化的情况。

图2 导向向量匹配时各波束形成器的输出SINR随输入SNR与快拍数变化情况
从图2a和图2b中可以看出,导向向量匹配时,各方法的输出SINR随输入SNR或快拍数增加而变大。MNC-FastICA与LSMI方法的性能比较相近,它们都优于SMI方法,且在快拍数N≥600时,它们的输出SINR随快拍数的变化缓慢。可见,基于MNCFastICA算法的波束形成是有效的。
3.2 阵列通道幅相误差存在时各波束形成器的性能比较
阵列通道幅相误差会导向向量失配。假设阵列仅存在道幅相误差,并假定式(11)中各阵元幅度误差和相位误差 ϕm均服从高斯分布且相互独立,零均值, ξm具有相同的方差=(0.1)2, ϕm也具有相同的方差=(5π/180)2。波束观察方向有3°偏差即θLook=θs+3°=23°,快拍数为N=800。考察输入SNR在−10~20 dB变化时各波束形成器的输出SINR,实验平均结果如图3所示。
从图3可以看出,LSMI方法的输出SINR在SNR>5 dB时开始迅速下降。其他3种方法的输出SINR随SNR增加而逐渐上升,它们的输出性能整体优于LSMI方法,特别是在SNR较高时。MNC-FastICA的输出SINR在不同输入SNR下都优于WCPO和NRDL两种方法。

图3 阵列通道幅相误差存在时各波束形成器的输出SINR随输入SNR变化情况
现将输入信噪比固定在SNR=15 dB,各方法的输出SINR随快拍数N变化的实验平均结果如图4所示。

图4 阵列通道幅相误差存在时各波束形成器的输出SINR随快拍数变化情况
从图4可以看出,随着快拍数增加,NRDL和MNC-FastICA方法的输出SINR缓慢提高,而WCPO和LSMI方法的输出则几乎保持不变。MNC-FastICA方法在不同快拍数下的输出性能优于其他方法。
3.3 阵列通道幅相误差不同时MNC-FastICA波束形成器的性能
本文实验考察3.2小节中阵列通道幅相误差不同时MNC-FastICA波束形成器的性能。首先固定各阵元相位误差的方差,改变幅度误差的方差,然后将固定,让变化,实验结果如图5所示。特别地,为方便比较,两幅图中也都给出了阵列通道没有幅相误差即σξ=σϕ=0时的结果。

图5 阵列通道幅相误差不同时MNC-FastICA波束形成器的输出SINR随输入SNR变化情况
从图5a和图5b可以看出,在阵列通道幅相误差较小的情况下,尽管误差(包括误差为零的情况)不同,但MNC-FastICA方法的输出性能几乎相同,因此它对该误差具有良好的稳定性。这恰好验证了2.2小节的结论,即当通道存在幅相误差H时,相当于给混合矩阵A即阵列流形矩阵做了一个线性变换,变换成了另一个混合矩阵HA,只要HA仍然是列满秩的,它并不妨碍MNC-FastICA方法对信源做分离。
4 结 束 语
本文采用MNC-FastICA方法对波束权向量进行了设计。其中,对理想阵列或仅有通道幅相误差的阵列,用同一方法校正了ICA方法分离源信号过程中产生的幅相模糊。MNC-FastICA波束形成器不必预估信号来波方向,从而避免了LSMI等经典方法中由于波束观察方向误差导致的导向向量失配问题。阵列通道幅相误差存在时,不必进行通道校正,MNC-FastICA方法对其不敏感,仿真表明它能获得优于WCPO等方法的输出性能。应当指出,本文方法的信源中非高斯源至多允许有一个,这是ICA方法的基本假设之一,而WCPO等方法则不受此条件限制,适用范围更广。
[1] STOICA P, WANG Z S, LI J. Robust Capon beamforming[J]. IEEE Signal Processing Letters, 2003, 10(6): 172-175.
[2] LI J, STOICA P, WANG Z S. Doubly constrained robust Capon beamformer[J]. IEEE Trans on Signal Processing, 2004, 52(9): 2047-2423.
[3] VOROBYOV S A, GERSHMAN A B, LUO Z Q. Robust adaptive beamforming using worst-case performance optimization: a solution to the signal mismatch problem[J]. IEEE Trans on Signal Processing, 2003, 51(2): 313-324.
[4] HANG R, de LAMARE R C. Robust adaptive beamforming using a low-complexity Shrinkage-based mismatch estimation algorithm[J]. IEEE Signal Processing Letters, 2014, 21(1): 60-64.
[5] LANDAU L, de LAMARE R C, HAARDT M. Robust adaptive beamforming algorithms using the constrained constant modulus criterion[J]. IET Signal Processing, 2014, 8(5): 447-457.
[6] XU Y, MA J, LIU Z, et al. A class of diagonally loaded robust Capon beamformers for noncircular signals of interest[J]. Signal Processing, 2014, 94(1): 670-680.
[7] 鄢社锋, 马远良. 传感器阵列波束优化设计及应用[M].北京: 科学出版社, 2009: 48-93.
YAN She-feng, MA Yuan-liang. Sensor array beampattern optimization theory with applications[M]. Beijing: Science Press, 2009: 48-93.
[8] NAI S E, SER W, YU Z L, et al. Iterative robust minimum variance beamforming[J]. IEEE Transactions on Signal Processing, 2011, 59(4): 1601-1611.
[9] CARDOSO J F, SOULOUMIAC A. Blind beamforming for non-Gaussian signals[J]. IEEE Proceedings F, 1993, 140(6): 362-370.
[10] NOVEY M, ADALI T. On extending the complex FastICA algorithm to noncircular sources[J]. IEEE Transactions on Signal Processing, 2008, 56(5): 2148-2154.
[11] ZHANG Y, KASSAM S A. Optimum nonlinearity and approximation in complex FastICA[C]//The 46th Annual Conference on Information Sciences and Systems (CISS). Princeton, NJ: IEEE, 2012.
[12] RUAN Z L, LI L P, QIAN G B. On extending the complex FastICA algorithms to noisy data[J]. Neural Networks, 2014, 60: 194-202.
编 辑 税 红
Robust Adaptive Beamforming Based on MNC-FastICA Algorithm
RUAN Zong-li1,2, WEI Ping1, QIAN Guo-bing3, and YUAN Xiao-lei1
(1. Center for Cyber Security, School of Electronic Engineering, University of Electronic Science and Technology of China Chengdu 611731; 2. College of Science, China University of Petroleum Qingdao Shandong 266580; 3. School of Electronic and Information Engineering, Southwest University Beibei Chongqing 400715)
The actual steering vector with errors is usually modeled as an uncertainty set in most robust adaptive beamforming (RAB) against the steering vector mismatch. However, it is commonly difficult to determine the constraint parameter in practice. In this paper, a RAB based on modified noncircular complex fast independent component analysis(MNC-FastICA) algorithm is proposed. The weight vector of beamformer can be constructed with the separation matrix found by MNC-FastICA algorithm and the amplitude and phase ambiguities of estimations resulted from separation are also calibrated. Thus, the signal directions of arrival (DOA) do not need to be predestinated, which voids the mismatch of signal steering vector due to the error of DOA in classical RAB methods. Moreover, the proposed method is not sensitive to the amplitude and phase errors of array channel so that array calibration is not necessary. Simulations are run and the performances are compared with classical methods such as worst-case performance optimization(WCPO). Results demonstrate the effectiveness and robustness of our method.
array; complex fast fixed-point algorithm; independent component analysis; robust adaptive beamforming
TN911.7
A
10.3969/j.issn.1001-0548.2017.03.005
2016 − 03 − 05;
2016 − 05 − 20
中央高校基本科研业务费专项资金(15CX02055A)
阮宗利(1978 − ),男,博士生,主要从事盲源分离、阵列信号处理方面的研究.
