工业机器人技术及其典型应用分析
2017-05-10牟富君
牟富君
(江苏巨能机械有限公司,江苏 宜兴 214261)
工业机器人技术及其典型应用分析
牟富君
(江苏巨能机械有限公司,江苏 宜兴 214261)
工业机器人具有工作效率高、可靠性好、重复精度高、适于高危作业等优势,在传统制造业、特别是劳动密集型产业的转型升级中将发挥重要作用。基于工业机器人的基本概念和技术参数,对工业机器人的组成进行详细介绍,并对工业机器人的应用和发展趋势作了阐述。到2016年我国已成为全球最大的机器人市场,“机器换人”已是大势所趋,我国须在关键技术研发和智能化发展上狠下功夫。
工业机器人;组成;应用;发展分析
机器人自20世纪60年代问世以来,经过半个多世纪的发展,已广泛应用于各个领域,成为航天航空、深海探密、工业制造以及自动化生产的主要机电一体化设备。随着社会的发展,人们越来越希望用机器人替代人类完成经济性、高污染性、高危险性和需要质量控制的工作,并直接推动产业升级。机器人根据其应用特点,大致可以分为服务机器人和工业机器人,工业机器人包括焊接机器人、搬运机器人、装配机器人、处理机器人和喷涂机器人等。服务机器人包括个人/家用机器人和专业服务机器人等。
工业机器人[1-2]是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行。现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。从工业机器人的用途而言,其主要完成的是通过计算机来控制机器人的自主自动化控制系统。美国机器人协会[3]将其定义为:“用来进行搬运机械部件或工件的、可编程序的多功能操作器,或通过改变程序可以完成各种工作的特殊机械装置”。1987年国际标准化组织[4]对工业机器人下了定义:“工业机器人是一种具有自动控制的操作和移动功能,能完成各种作业的可编程操作机器”。两个定义基本一致。
目前,从工业机器人品牌看,欧美日三分天下,四大巨头瑞士ABB和德国库卡各占其一,日系发那科和日本安川电机占据其二,它们的工业机器人本体销量占据了全球市场的半壁江山。另外,日本的三菱、川崎、那智不二越、爱普生,美国 Adept、意大利柯马、韩国的现代和中国新松机器人自动化股份有限公司等都有一定的品牌知名度和市场占有率。
1 工业机器人的组成
一般来说,工业机器人由三大部分6个子系统组成。三大部分是机械部分、传感部分和控制部分。6个子系统可分为机械结构系统、驱动系统、感知系统、机器人-环境交互系统、人机交互系统和控制系统[3]。具体而言,机械部分是机器人所需要的操作机械,例如机械手腕、机械臂部、行走设备等,这是构成机器人运行的主体。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度。传感部分主要功能是将计算机控制命令转化成为机械语言,进而实现该命令。控制部分是按照输入流程,对驱动程序、执行机构发出指令信息,并对其进行信息控制。图1是工业机器人组成的框图。
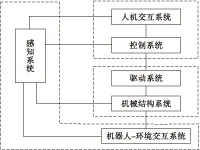
图1 工业机器人的组成
1.1 机械结构系统
从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴的坐标原点,而并联机器人一个轴运动则不会改变另一个轴的坐标原点。早期的工业机器人都是采用串联机构。并联机构定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。并联机构有两个构成部分,分别是手腕和手臂。手臂活动区域对活动空间有很大的影响,而手腕是工具和主体的连接部分。与串联机器人相比较,并联机器人具有刚度大、结构稳定、承载能力大、微动精度高、运动负荷小的优点。在位置求解上,串联机器人的正解容易,但反解十分困难;而并联机器人则相反,其正解困难,反解却非常容易。
1.2 驱动系统
驱动系统是向机械结构系统提供动力的装置。根据动力源不同,驱动系统的传动方式分为液压式、气压式、电气式和机械式4种。早期的工业机器人采用液压驱动。由于液压系统存在泄露、噪声和低速不稳定等问题,并且功率单元笨重和昂贵,目前只有大型重载机器人、并联加工机器人和一些特殊应用场合使用液压驱动的工业机器人。气压驱动具有速度快、系统结构简单、维修方便、价格低等优点。但是气压装置的工作压强低,不易精确定位,一般仅用于工业机器人末端执行器的驱动。气动手抓、旋转气缸和气动吸盘作为末端执行器可用于中、小负荷的工件抓取和装配。电力驱动是目前使用最多的一种驱动方式,其特点是电源取用方便,响应快,驱动力大,信号检测、传递、处理方便,并可以采用多种灵活的控制方式,驱动电机一般采用步进电机或伺服电机,目前也有采用直接驱动电机,但是造价较高,控制也较为复杂,和电机相配的减速器一般采用谐波减速器、摆线针轮减速器或者行星齿轮减速器。由于并联机器人中有大量的直线驱动需求,直线电机在并联机器人领域已经得到了广泛应用。
1.3 感知系统
机器人感知系统把机器人各种内部状态信息和环境信息从信号转变为机器人自身或者机器人之间能够理解和应用的数据和信息,除了需要感知与自身工作状态相关的机械量,如位移、速度和力等,视觉感知技术是工业机器人感知的一个重要方面。视觉伺服系统将视觉信息作为反馈信号,用于控制调整机器人的位置和姿态。机器视觉系统还在质量检测、识别工件、食品分拣、包装的各个方面得到了广泛应用。感知系统由内部传感器模块和外部传感器模块组成,智能传感器的使用提高了机器人的机动性、适应性和智能化水平。人类的感受系统对感知外部世界信息是极其巧妙的,然而对于一些特殊的信息,传感器比人类的感受系统更有效。
1.4 机器人-环境交互系统
机器人-环境交互系统[5]是实现机器人与外部环境中的设备相互联系和协调的系统。机器人与外部设备集成为一个功能单元,如加工制造单元、焊接单元、装配单元等。当然也可以是多台机器人集成为一个去执行复杂任务的功能单元。
1.5 人机交互系统
人机交互系统是人与机器人进行联系和参与机器人控制的装置。例如:计算机的标准终端、指令控制台、信息显示板、危险信号报警器等。
1.6 控制系统
控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。如果机器人不具备信息反馈特征,则为开环控制系统;具备信息反馈特征,则为闭环控制系统。根据控制原理可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运动的形式可分为点位控制和连续轨迹控制。
2 工业机器人的应用
目前工业机器人在国内的应用,以汽车制造业(约40%)以及电子工业(约20%)应用居多,此外还有在橡胶塑料、军工、航空制造、医疗设备、冶金、食品等领域应用。
2.1 搬运机器人
搬运机器人[6]是工业机器人的一种类型,它由计算机控制,具有移动、自动导航、多传感器控制、网络交互等功能,得益于机器人速度、精度、稳定性等方面性能的提高,它广泛应用于机械、电子、纺织、卷烟、医疗、食品、造纸等行业的柔性搬运、传输等功能。目前,搬运机器人可以搬运的东西越来越多,负载也越来越大。除了柔性搬运和传输的功能外,搬运机器人也用于自动化立体仓库、柔性加工系统、柔性装配系统;同时可在车站、机场、邮局的物品分拣中作为运输工具。
六关节机器人定位精度高、动作灵活,广泛应用于机床的上下料,生产线的上下料和机器人间的对接;并联机器人负载能力较低,但速度极高,因此经常用于生产线上小件零件的上下料和堆放,可以大大提高生产速度。ABB公司的 IRB7600六轴机器人,最大承重能力高达650 kg,适用于各行业的重载场合;IRB660机器人采用了四轴设计,具有 3.15 m 到达距离和250 kg 有效载荷,适合用于袋、盒、板条箱、瓶等包装形式的物料堆垛。
2.2 焊接机器人
焊接机器人通过在通用的工业机器人装上某种焊接工具而构成,也有少数是为某种焊接方式专门设计,从而在焊接生产领域代替焊工从事焊接任务,图2是一般的焊接机器人的结构组成[7]。由于机器人的运动较人工更加平稳,因此焊接机器人的焊接质量也较稳定。新型焊接机器人都满足可在0.3 s内完成50 mm位移的最低功能要求,可在短时间内快速移位,非常适合运用于点焊,极大地提高焊接速度,提高生产效率。
点焊机器人主要用于汽车整车的焊接工作,生产过程由各大汽车主机厂负责完成。除此之外,焊接机器人还用于工程机械、金属结构和军工等行业。随着世界制造业的迅速发展,焊接技术的应用也越来越广泛,焊接智能化技术水平也越来越高。核心技术的作用得以显现,数控和电源方面有所发展,激光焊接技术成为一大亮点,焊接机器人应用更加普及化成为国内外焊接技术的发展趋势以及焊接生产发展的新需求和新动向,实现焊接产品的自动化、柔性化与智能化已成为发展的必然趋势。
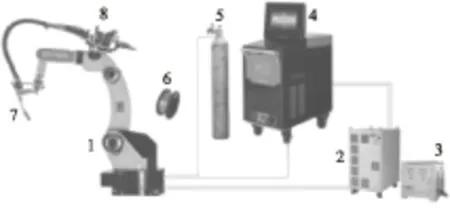
注:1.机器人本体;2.控制柜;3.变压器;4.焊接电源;5.流量计;6.焊丝盘;7.焊枪;8.送丝装置。
图2 焊接机器人结构组成
2.3 激光加工机器人
激光加工机器人是将机器人技术应用于激光加工中,通过高精度工业机器人实现更加柔性的激光加工作业[8]。本系统通过示教盒进行在线操作,也可通过离线方式进行编程。该系统通过对加工工件的自动检测,产生加工工件的模型,继而生成加工曲线,也可以利用CAD数据直接加工。可用于工件的激光表面处理、打孔、焊接和模具修复等。
2.4 喷涂机器人
喷涂机器人同样被大量地应用在汽车、家具、电器以及搪瓷等行业。工业化社会的发展要求产品生产车间高强度、高效率地完成喷涂工艺,由于此工艺易对人体健康造成损害,喷涂机器人应运而生。关节型工业机器人加上密封设计,加上其自由度大、速度快、工作空间运行灵活的特点,尤为适合有复杂运行轨迹的运行操作。
2.5 装配机器人
装配机器人是柔性自动化装配系统的核心设备,具有精度高、柔顺性好、工作范围小、能与其他系统配套使用等特点,主要用于各种电器及手机制造等行业。
3 我国工业机器人的现状与发展
世界工业机器人40年形成了约160万台/套的装机量,2012年世界新装机器人182 000台,主机市场80~100亿美元,并带动3倍左右软件集成、配套设备、系统工程等系统集成市场,总计260~330亿美元,其中焊接和搬运机器人占了70%的市场份额。2014年我国市场共销售57 000台工业机器人,占全球销售量的1/4,同比增幅达55%,已连续两年成为全球第一大工业机器人市场。
多重因素促使我国工业机器人市场快速增长,第一是低端劳动力供给不足,越来越少的人愿意从事工资低、单调重复以及环境差的工作;第二是工业机器人替代人工的经济性不断提升,一方面劳动力成本不断攀升,另一方面机器人销售价格不断下降;第三是产业升级,经济转型促使高附加值的新兴产业规模迅速扩大,对企业的自动化及智能化要求提高,导致企业生产效率和市场竞争力大幅提升。
我国工业机器人技术的研究起步于20世纪80年代,当前我国工业机器人低端产品过热,高端产品严重不足,大部分工业机器人企业没有自己的核心技术,目前与国外产品在技术方面的差距仍然很大。虽然我国政府对工业机器人的各项扶持政策力度加大,但是在材料、制造装备及工艺方面与国外相比差距明显,并且还不能生产高精密、高速与高效的关键部件[9]。
现代机器人最大的特点就是配备很多传感器,这时的机器人可以通过接收外界信息对外界进行反馈,具有一定的智能性,具有自我调节的能力。除了视觉感知之外,逐渐给予听觉和触觉等其他方面的感知,以提高机器人的智能程度。现在的工业机器人虽然可以有一定的感知能力,并能够进行调节适应,但并不具备独立判断、推理和决策的能力,赋予机器人智能思维,实现真正意义上的自动化、智能化生产,这将会是机器人未来发展的趋势。
4 结束语
自从工业机器人诞生以来,其在各领域的应用研究就从未中断过。我国工业机器人的核心技术被垄断,成本、国内外竞争、品牌等原因造成我国国内机器人产业生存困难。数据显示,我国到2016年已成为全球最大的机器人市场,“机器换人”已是大势所趋。但是,我国在工业机器人的研发方面,还有很长的路要走,想要抢占工业机器人市场,必须做好长远的战略部署,开发一系列有市场前景,且具有自主知识产权的工业机器人及自动化成套设备,提升核心竞争能力,在关键技术研发和智能化发展上狠下功夫。随着机器人技术的发展和工业机器人的广泛应用,装备制造业将会出现深刻的历史变革。
[1] 郁晗. 工业机器人的应用和发展趋势[J]. 电子世界, 2014(10):370-371.
[2] PEDERSEN M R, NALPANTIDIS L, ANDERSEN R S, et al. Robot skills for manufacturing: from concept to industrial deployment[J]. Robotic Computer Integr Manuf, 2016,37(2):282-291.
[3] 计时鸣, 黄希欢. 工业机器人技术的发展与应用综述[J]. 机电工程, 2015, 32(1):1-13.
[4] 任志刚. 工业机器人的发展现状及发展趋势[J]. 装备制造技术, 2015(3):166-168.
[5] 机器人的组成[EB/OL]. (2013-10-22)[2017-01-16].http://www.kszyxx.net.cn/kexue/kexue-2/zutiweb/zu40/006.htm.
[6] 刘永安, 余天荣. 工业机器人的应用研究[J]. 机电工程技术, 2014(2):52-53.
[7] 陈善本, 吕娜. 焊接智能化与智能化焊接机器人技术研究进展[J]. 电焊机, 2013(5):28-36.
[8] 王效, 王树波, 邓广福. 浅析激光加工机器人技术在工业中的应用[J]. 装备制造技术, 2015(4):222-224.
[9] 刘启印, 柏赫. 常用机器人分类及关键技术[J]. 中国科技博览, 2012(14):213.
Industrial robots technology and its typical application
MU Fujun
(Jiangsu Juneng Machinery Co., Ltd., Yixing 214261, Jiangsu, China)
Industrial robots play an important role in traditional manufacturing, particularly in transformation and upgrading of labor-intensive industries for its high efficiency, good reliability, high repeatability, being suitable for high-risk operations, and other advantages. Based on the basic concepts and technical parameters of industrial robots, the composition of industrial robot was introduced in detail, what’s more, the application and development trend of industrial robots were elaborated. China had become the world’s largest robot market in 2016, and “Machine Substitution” was the general trend, so China must make great efforts in the development of key technologies and intelligent development.
industrial robot; composition; application; development analysis
2017-01-16;
2017-02-13
牟富君(1963),男,工程师,主要从事粮油机械研发和管理工作(E-mail)mfj@ju-neng.cn。
TS203;TP23
B
1003-7969(2017)04-0157-04
