偏瘫患者辅助下肢外骨骼设计与仿真分析
2017-05-10秦利明林辉杰方绿茵
秦利明,林辉杰,李 军,方绿茵
(台州学院 机械工程学院,浙江 台州 318000)
偏瘫患者辅助下肢外骨骼设计与仿真分析
秦利明,林辉杰,李 军,方绿茵
(台州学院 机械工程学院,浙江 台州 318000)
针对偏瘫患者外骨骼康复机器人降低外骨骼质量的要求,设计了一种辅助下肢外骨骼机器人,采用柔索驱动的膝关节,具有结构简单,质量轻的特点;同时利用ADAMS建立了外骨骼关节柔索驱动的动力学模型,绳索模块建立了柔索驱动模型,通过Ariel生物运动分析软件,采集髋、膝、踝关节运动数据,运用Spline函数进行了仿真分析;经过仿真分析柔索驱动在上台阶运动过程中的不同拉簧预紧力和拉簧刚度下传动特性和驱动力矩,为进一步研究设计下肢外骨骼提供依据。
偏瘫患者; 外骨骼; 柔索驱动; 动力学仿真
0 引言
偏瘫患者辅助下肢外骨骼作为一种帮助患者进行日常步行训练的机器人,很好的消除了缺少跑步机、悬吊减重系统以及康复训练场所等的影响,实现了患者康复训练的自主性和自由行[1-2]。临床医学证明,偏瘫患者通过辅助下肢外骨骼合理训练可以快速提高和恢复损伤肢体运动能力[3]。因此,诸多学者已经对外骨骼康复机器人进行了大量研究[4-7],但大多是通过电机直接驱动各关节运动,由于下肢体积笨重增加了损伤肢体的负担,影响舒适性,同时存在浪费能源的缺点。Veneman等[8-9]将钢丝绳传动应用到LOPES下肢外骨骼各关节的驱动上并取得了成功,该机器人大大减轻了外骨骼本身的质量,有效地减轻了康复训练过程中外骨骼对患者的影响,但存在成本高昂,系统复杂等缺点[10]。
针对以上情况,本文设计了一种新型的偏瘫患者外骨骼康复机器人,通过两个滑轮的转动来驱动膝关节运动,降低了外骨骼的质量,大大简化了传动排布的复杂性,增加了机构的柔顺性和康复人员的安全性。并在此基础上建立了ADAMS偏瘫患者辅助下肢外骨骼的动力学模型,该模型有效地解决了柔索驱动问题,同时考虑了柔索与伸缩套管之间的摩擦力,为柔索驱动进一步的设计和优化奠定了基础。
1 下肢外骨骼工作机理及其结构分析
1.1 工作原理
偏瘫患者步行训练是基于中枢神经的可塑性及功能重组理论,帮助患者不同场合下进行步行训练,通过多次的重复运动向大脑反馈促通信号,消除肌肉痉挛模式,重塑大脑可塑性,进而建立新的组合关系,恢复自主的运动控制,达到促进中枢神经恢复、提高生活质量的目的。如图1所示,下肢通过关节、韧带等连接在一起,其中髋关节运动主要依靠股二头肌伸缩实现,膝关节运动主要依靠股四头实现。偏瘫患者外骨骼康复机器人主要参考二头肌和股四头的肌肉群分布,来模拟这两个肌肉群在人体行走过程中所发挥的作用。

图1 肌肉群分布图
1.2 偏瘫患者辅助下肢外骨骼组成
偏瘫患者辅助下肢外骨骼主要由单腿外骨骼机构、可伸缩拐杖和电池及控制系统组成。单腿外骨骼由大腿杆、小腿杆、膝关节、踝关节、足底踏板等组成。髋关节、膝关节由对应电机通过传动机构驱动,二电机均安装在拐杖支架上,减少电机驱动负荷。小腿杆与足底踏板之间为踝关节,采用铰接加减振机构,采用无动力设计,简化机构、降低成本;可伸缩拐杖由拐杖支架、伸缩机构、穿戴装置等组成。伸缩机构设计在拐杖底端,由驱动电机通过减速器、丝杠螺母、导向机构实现直线伸缩运动。拐杖顶端设置横向支撑条,使用时顶在患者腋下。腋下支撑条连接肩带,用于将拐杖固定到患侧肩膀。支撑条下方位置,设置胸腰护板。胸腰护板与拐杖活动铰接,穿戴后用带子扣紧,用于将拐杖与患者固定。
单腿外骨骼机构和可伸缩拐杖通过髋关节连接,其结构如图2所示。装备下肢外骨骼的偏瘫患者在此机构的帮助下能够实现起立、坐下、平地行走、上下楼梯等功能。患者根据自己需要的运动模式控制外骨骼辅助患者完成一定的动作。外骨骼控制系统在传感器的检测下通过电机驱动各个关节按照预定的程序完成一系列下肢运动。
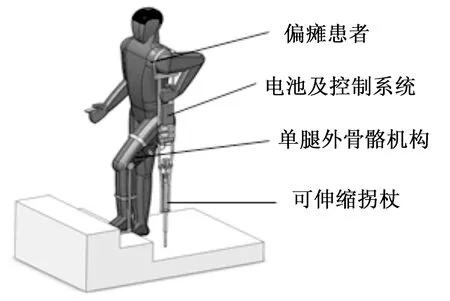
图2 外骨骼整体结构图
1.3 结构设计与分析
偏瘫患者辅助下肢外骨骼的髋关节和膝关节设置驱动以使大腿、小腿抬起迈步,传动形式如图3所示。
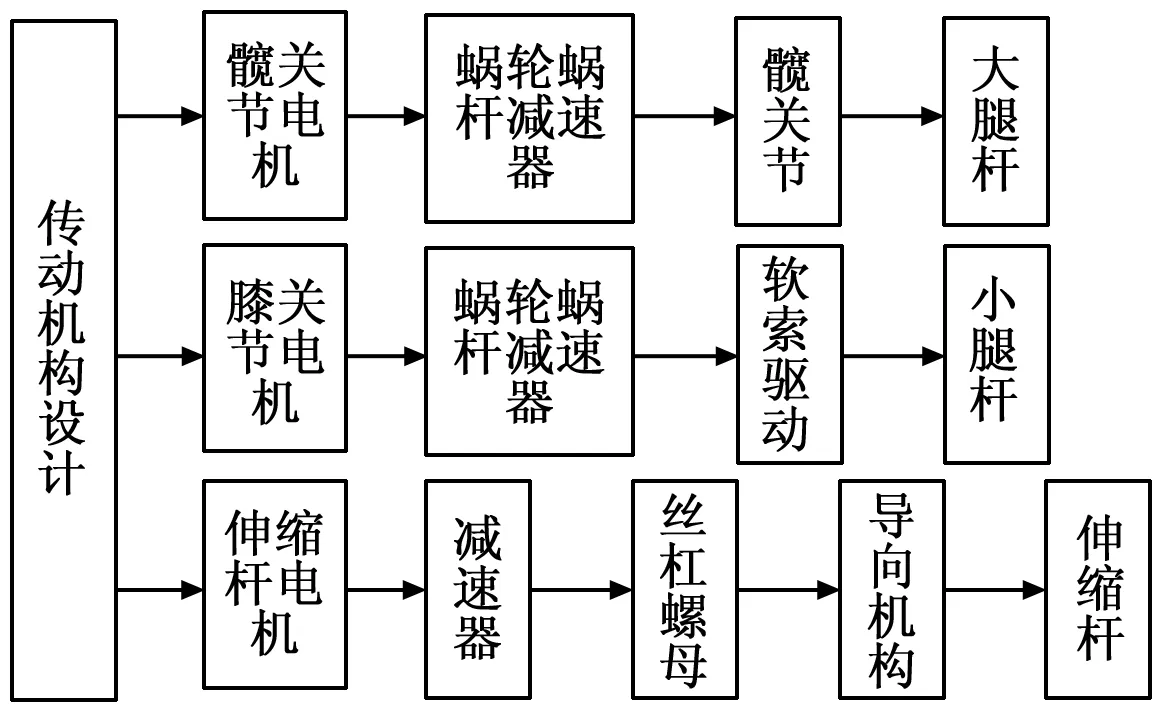
图3 传动方式
1)髋关节传动设计:安装在拐杖支架上的驱动电机,经齿轮减速后,通过蜗轮蜗杆改变传动方向,驱动大腿杆转动,实现髋关节动作。
2)膝关节传动设计:安装在拐杖支架上的膝关节电机,经减速后,通过丝杠螺母及导向机构形成直线运动,通过自行车刹车线传递运动,带动小腿杆转动,实现膝关节动作。
3)拐杖伸缩传动设计:拐杖伸缩由驱动电机通过丝杠螺母及导向机构,实现直线无转动伸缩。
1.4 膝关节传动设计
1.4.1 膝关节在设计过程中存在的技术难点
偏瘫患者单侧腿基本丧失运动机能,但腿本身的重量依旧存在,在运动时会影响身体的重心平衡,尤其表现在上楼梯和下楼梯过程中。在该过程中,身体由于平衡问题容易摔倒,在设计外骨骼辅助装置时,膝关节的传动设计,更是存在了诸多的设计难点。
1)穿戴该辅助装置后,是否利于患者掌握在运动过程中的平衡问题;
2)该辅助装置所提供的驱动力,是否满足膝关节的运动要求,如上楼梯时,膝关节所联接的股骨和胫骨之间的运动角度需达到30°~60°;
3)该设计中所采用弹簧的初始预紧力设置及刚度选择等;
4)在步态规划和步态控制编程中,髋关节传动和膝关节传动的控制将会特别复杂,不仅需要考虑患者在运动中的速度、轨迹、平衡等,还需要考虑到两个电机控制过程中的协调性和一致性,对电机的精度也有了比较高的要求。
1.4.2 解决方法
膝关节驱动系统采用电机通过涡轮蜗杆减速之后驱动滑轮,滑轮拉动钢丝绳软索,软索通过软索管带动膝关节的滑轮转动,在软索靠近膝关节的一段通过两根拉簧连接,用于提供预紧力和缓冲,为了防止软索相对滑轮发生滑动,通过螺钉把滑轮与绳索固定,膝关节传动结构如图4(a)和(b)所示。

图4 膝关节传动结构示意图
针对患者在使用该穿戴设备在运动过程中可能出现的平衡问题,该穿戴装置在控制系统方面,设置了3种模式:正常运动模式、上台阶运动模式和下台阶运动模式3种。
1)正常运动模式:即患者使用该设备在平缓路段走路、康复训练时,膝关节所联接的股骨和胫骨之间的运动角度只需达到5°~10°,同时髋关节传动电机同时协同运动,即可保障患者的顺利前行目的。
2)上台阶模式:主要针对患者上楼梯的情况,在此模式下,首先由可伸缩拐杖伸长,到适当范围后,膝关节和髋关节电机同时协同向前运动,另一侧(健康侧)运动,实现上台阶的目的。
3)下台阶模式:主要针对患者下楼梯的情况,此种情况和上台阶正好相反,但此时特别需要注意平衡问题,在运动时,首先由膝关节和髋关节电机同时协同向前运动,之后可伸缩拐杖收缩,另一侧(健康侧)运动,实现下台阶。此过程中,患者的重心主要支撑在拐杖上,随拐杖的伸缩变化,此过程需要患者多加练习。
2 下肢外骨骼建模与仿真
2.1 人体数学模型的构件方法
为了实现对外骨骼行走仿真计算,前人研究是将人体双足行走模型简化为五杆模型[11]、七杆模型[12]和倒立摆模型[13]。本文针对偏瘫患者单腿外骨骼建模则采用5杆模型即可。5杆模型是讲上体作为一个质量块,将腿分为大腿和小腿[14]。按照“中国成年人体惯性参数测定和大样本统计”以及“中国成年人人体质心的研究”的科研成果和《中国成年人人体尺寸》国家标准,以21岁男性青年为模版确定了质量大小和分布,如图5所示。

图5 人体简化模型
2.2 人体动力学模型构建
偏瘫患者下肢外骨骼主要的辅助动作为:起立坐下、平地行走、上下楼梯3种运动状态。根据运动学研究分别对这3种运动状态进行抽象分类为4种状态:无载荷弯曲膝关节、负载弯曲屈膝关节、无负载伸膝关节和负载伸膝关节。利用人体运动图像三维采集定位系统,采集偏瘫患者健康侧腿部在旁人辅助下完成起坐、平地行走,上下楼等动作的图像,再通过Ariel生物运行分析软件获取各运行模式对应腿部关节运动参数,为实现外骨骼的多体动力学模型仿真控制打下基础。
2.3 人体和下肢外骨骼虚拟样机的构建
在SolidWorks中建立人体和下肢外骨骼三维模型,导入ADAMS/View中添加相关质量、材料属性,以及各关节的运动副,建立多体动力学模型[15-16],如图6所示。

图6 人体和下肢外骨骼多体动力学模型
2.4 关节柔索驱动模型
2.4.1 滑轮与柔索关系的建立
为了防止滑移,需要添加柔索与滑轮在特定位置的固定关系,但是ADAMS的绳索模块并没有该功能[17],因此在建模中,需要把柔索从固定锚点分开成两段,柔索1和柔索2,然后两根柔索的一端在该锚点处固定,该锚点与滑轮固定,从而实现柔索既在滑轮上缠绕,又在滑轮上固定的效果,如图7所示。

图7 滑轮与柔索的关系图
2.4.2 柔索与导索管的摩擦
由于柔索需要导索管引导,柔索在拉力作用下,与导索管存在摩擦力,柔索与导索管的接触为单侧接触,类似于圆柱与内半圆形面之间的接触,为了模拟柔索在到所里面的摩擦力问题,在柔索路径上,根据柔索的长度,建立周长一般约等于柔索长度的滑轮,从而模拟导管与柔索之间摩擦力的效果,结构如图8所示。滑轮与柔索之间的摩擦系数可以设定,可以根据柔索与导索管之间的摩擦力,设置柔索与滑轮之间的摩擦力。
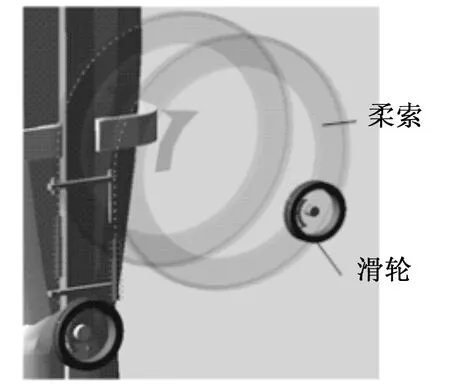
图8 导索管与柔索关系图
2.5 仿真计算
根据采集来的人体运动数据,即各个关节运动的数据进行三次样条函数拟合后,导入ADAMS中,将ADAMS中各关节的motion添加Spline函数,从而实现仿真中各关节运动的控制。然后仿真分析膝盖关节柔索驱动仿真的效果。以上台阶为例,仿真与分析拉簧的刚度和预紧力对于柔索驱动的影响,主要通过对比输入驱动与关节仿真运动。
经过预试验发现拉簧预紧力和拉簧刚度对于柔索传动效果影响非常显著,因此对两个因素进行了仿真分析。
2.5.1 拉簧预紧力对于柔索传动的影响
由该系列图可以发现,在某个拉簧刚度下,预紧力达到200 N后,再增加预紧力对于柔索驱动的传动影响非常小,可以忽略。

图9 拉簧刚度200 N/mm预紧力影响图

图10 拉簧刚度300 N/mm预紧力影响图
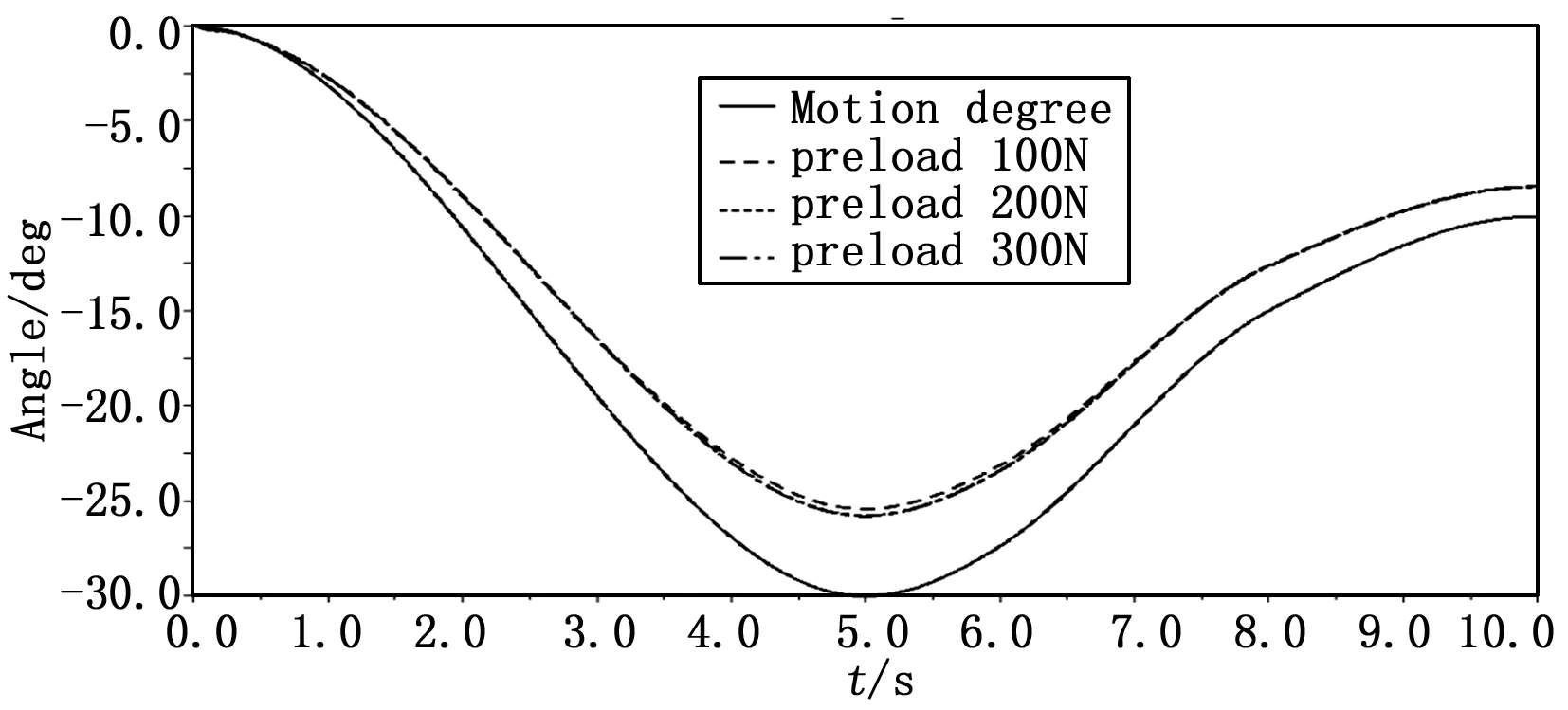
图11 拉簧刚度400 N/mm预紧力影响图
2.5.2 拉簧刚度对于柔索驱动的影响
为了进一步分析拉簧刚度对于柔索驱动的影响,选取了在预紧力300N的条件下,不同的拉簧刚度进行了对比,如图12所示。由仿真结果可知,随着刚度的增加,刚度对于柔索驱动的影响逐渐减小。

图12 拉簧刚度对柔索驱动的影响图
2.5.3 膝关节驱动力矩与柔索索刚度关系
通过对膝关节驱动力与柔索刚度的分析,如图13所示,可以为发现柔索刚度对驱动力有一定影响,不过影响并不大,为驱动电机的选型提供依据。

图13 膝关节驱动力矩与柔索刚度关系图
3 结论
本文设计了一种新型的偏瘫患者外骨骼康复机器人,通过柔索驱动膝关节运动,降低了外骨骼的质量,大大简化了传动排布的复杂性,增加了机构的柔顺性和康复人员的安全性。并在此基础上建立了ADAMS偏瘫患者辅助下肢外骨骼的动力学模,该模型有效仿真模拟了柔索驱动部分,同时考虑了柔索与伸缩套管之间的摩擦力,并对拉簧预紧力与刚度对柔索驱动的影响和驱动力进行了仿真分析,为下肢外骨骼机构进一步的设计和优化奠定了基础。
[1] 蔡兆云,肖湘江. 外骨骼机器人技术研究综述[J]. 国防科技, 2007(12): 6-8.
[2] 周达岸,李建军. 下肢外骨骼机器人的现状与展望[J]. 中国康复理论与实践, 2013(12): 1132-1134.
[3] 李会军,宋爱国. 上肢康复训练机器人的研究进展及前景[J]. 机器人技术与应用, 2006(04): 32-36.
[4] 赵彦峻,徐 诚. 人体下肢外骨骼设计与仿真分析[J]. 系统仿真学报,2008(17): 4756-4759.
[5] 张玉叶,张小栋,江 城,等. 一种下肢外骨骼康复机器人优化的结构设计与控制仿真分析[J]. 机械与电子,2015(5): 77-80.
[6] 李会军,宋爱国. 上肢康复训练机器人的研究进展及前景[J]. 机器人技术与应用,2006(4): 32-36.
[7] 伊 蕾,张立勋,于彦春. 六连杆助行机构的动力学分析及仿真研究[J]. 中国康复医学杂志,2010(07): 662-666.
[8] Veneman J F, Ekkelenkamp R, Kruidhofr, et al. A series elastic-and Bowden-cable-base actuation system for use as torque actuator in exoskeletontype robots[J]. Robotics Research, 2005, 25(3):261-281.
[9] Veneman J F, Ekkelenkamp R, Kruidhofr, et al.Design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation [J]. IEEE Transaction on Neural Systems and Rehabilitation Engineering.2007, 15(3):379-386.
[10] 王卫东. 基于绳索驱动的并联康复机器人研究[D].南京:南京航空航天大学, 2012.
[11] Furusho J, Masubuchi M. A Theoretically Motivated reduced order model for the control of dynamic biped locomotion [J]. Trans.ASME, Journal of Dynamic System, Measurement, and Control, 1987,109: 155-163.
[12] Furusho J. Sensor-based control of a nine-link biped [J]. The International Journal of Robotic Research, 1990, 9(2): 83-98.
[13] Kazerooni H, Huang L. On the control of the Berkeley lower extremity exoskeleton(BLEEx)[M].USA:IEEE,April 2005:4353-4360.
[14] 杨 巍,张秀峰,杨灿军,等. 基于人机5杆模型的下肢外骨骼系统设计[J]. 浙江大学学报(工学版), 2014(03): 430-435.
[15] 李增刚. ADAMS入门详解与实例(第2版)[M].北京:国防工业出版社,2014.
[16] 贾长治,殷军回,薛文星,等.MD ADAMS虚拟样机从入门到精通[M].北京: 机械工业出版社, 2010.
[17] 李永波,魏 禹. 基于虚拟样机滑轮-绳索机构的建模及仿真分析[J]. 应用科技,2013(3): 1-5.
Design and Simulation Analysis of Assist of Hemiplegic Patient’s Exoskeleton
Qin Liming, Lin Huijie, Li Jun, Fang Lvyin
(School of Mechanical Engineering,Taizhou University, Taizhou 318000, China)
s: To reduce the quality of the hemiplegia rehabilitation exoskeleton robot, a kind of auxiliary lower limb exoskeleton robot was designed. It utilizes a cable driven knee joint, which has the advantages of simple structure and light quality characteristics. Also use Adams to establish the dynamic model of the exoskeleton joint, rope module established soft cable driven model, by Ariel biological motion analysis software, hip, knee and ankle joint motion data acquisition and simulation analysis is carried out by using spline function. Through the simulation analysis soft cable driven in the step motion process in different spring pretightening force and spring stiffness on transmission characteristics and driving torque and provide the basis for further research and design of lower extremity exoskeleton.
hemiplegia; exoskeleton; wire driven; dynamics simulation
2016-11-20;
2016-12-11。
浙江省科技厅公益技术研究社会发展项目(2015C33242);国家级大学生创新创业训练计划(201610350001)。
秦利明(1984-),男,河南焦作人,本科,实验师,主要从事机械设计制造及其自动化方向的研究。
1671-4598(2017)04-0229-04
10.16526/j.cnki.11-4762/tp.2017.04.062
TP273
A
